Clear Sky Science · tr
Tel şeklindeki şekil hafızalı alaşım aktüatörleri: modelleme, tasarım ve kontrol
Şeklini “hatırlayan” metal teller
İnce bir metal telin kas gibi çekebildiğini, bir robot parmağını sessizce bükebildiğini, uçuşta bir uçak kanadının şeklini yeniden verebildiğini veya basitçe ısıtılıp soğutularak zayıf bir kalbi nazikçe sıkabildiğini hayal edin. Bu derleme makale, şekil hafızalı alaşımlardan (SMA) yapılmış bu tür telleri inceliyor; nasıl çalıştıklarını, mühendislerin bunları nasıl tasarlayıp kontrol ettiklerini ve robotlar, uçaklar, tıbbi cihazlar ve giyilebilir teknolojide gerçek dünyada nerelerde kullanıldıklarını açıklıyor.
Akıllı metal teller nasıl canlanır
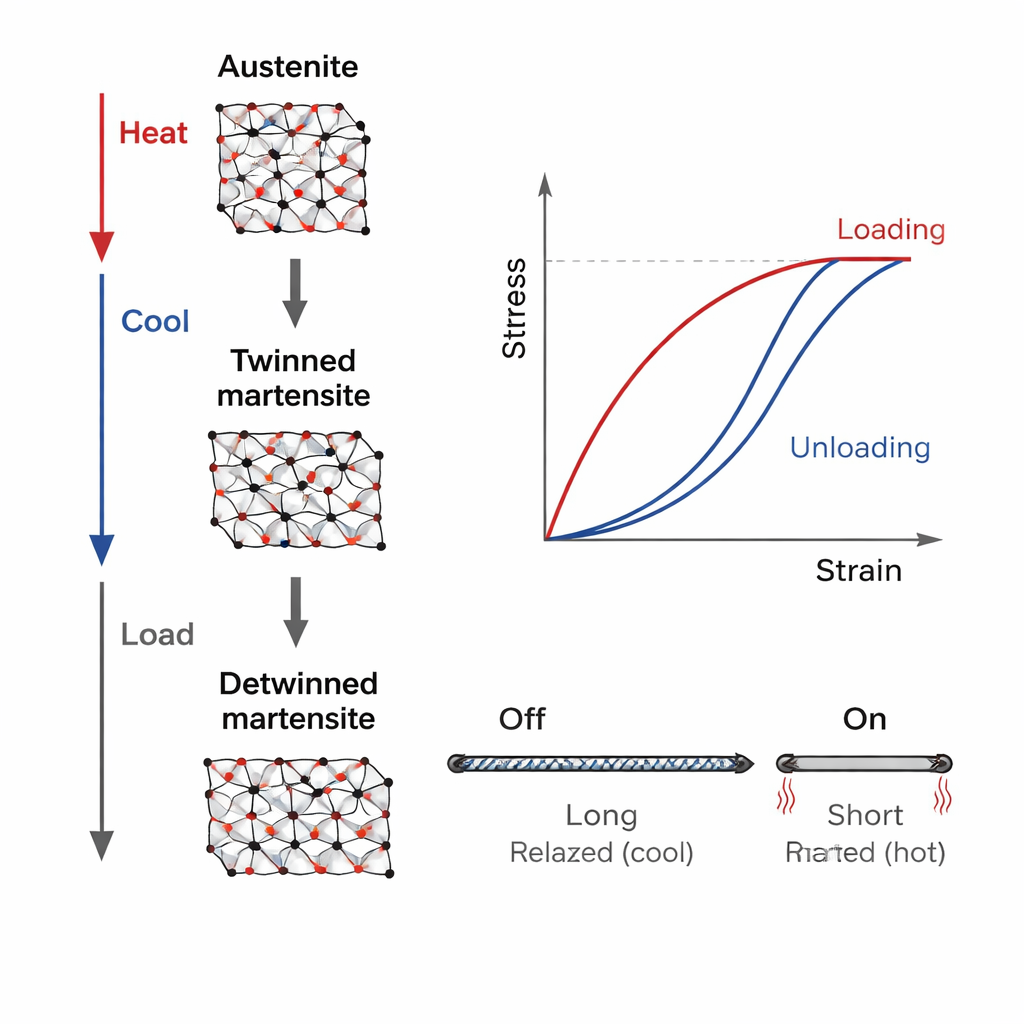
Şekil hafızalı alaşımlar, deforme edilebilen ve ardından sıcaklık değiştiğinde önceden belirlenmiş bir şekle geri dönebilen özel metallerdir. Şekil hafızası etkisi olarak adlandırılan bir modda, tel serin ve nispeten yumuşakken bükülebilir; ısıtıldığında ise orijinal formuna geri döner. Süperelastik modda ise alaşım yük altında uzayabilir ve yük kaldırıldığında tekrar eski haline gelir. Metalin içindeki bu davranış, farklı kristal düzenleri arasındaki katı–katı faz değişimlerinden kaynaklanır; bu da tepkiyi yüksek derecede doğrusal olmayan ve tahmin etmesi biraz zor hale getirir. SMA teller ince olduklarından mühendisler genellikle onları bir boyutlu elemanlar olarak ele alır; bu da sıcaklık, gerilme, şekil değiştirme ve elektrik akımı arasındaki bağlantıları tanımlayan matematiksel modelleri basitleştirir.
Denklemlerden veri odaklı modellere
Bu akıllı telleri güvenilir şekilde kullanmak için tasarımcıların ne kadar kuvvet çekebileceklerini, ne kadar hareket ettiklerini, ne kadar ısındıklarını ve elektriksel dirençlerinin nasıl değiştiğini öngören modellere ihtiyaçları vardır. Klasik “konstitütif” modeller teli bir kütle malzeme olarak ele alır ve iç fazlarının stres ve sıcaklıkla nasıl değiştiğini izler. Bu modeller verimli olmakla birlikte basitleştirici varsayımlara dayanır. Paralel olarak araştırmacılar, deneysel verilerden telin davranışını doğrudan öğrenmek için makine öğrenmesi ve sinir ağlarını giderek daha fazla kullanıyor; bu sayede ince histerezis ve geçmiş etkileri yakalanabiliyor. Diğer önemli bir çalışma hattı, akım kaynaklı ısıtma sırasında telin elektriksel direncinin ve sıcaklığının nasıl evrildiğini inceleyerek kendinden algılamayı mümkün kılıyor — yani ayrı sensörler eklemek yerine yalnızca direnci ölçerek kuvvet veya hareket tahmini yapabilme yeteneği.
Hareket inşası: Basit yükler, yumuşak yapılar ve yapay kaslar
Donanım tarafında makale, tel tabanlı SMA aktüatörleri nasıl yüklendiklerine göre sınıflandırıyor. En basit “lineer yük” düzeneklerinde bir tel bir yay veya ağırlığa karşı çekerek tutucuları veya uzay serbest bırakma mekanizmalarını sürer. Daha gelişmiş “doğrusal olmayan yük” sistemleri telleri esnek kirişlere, yumuşak polimerlere, tekstillere veya origami benzeri yapılara gömerek büyük bükülme hareketleri, sürünen küçük robotlar ve dokuma dış iskelet eldivenleri elde eder. Diferansiyel konfigürasyonlar iki veya daha fazla zıt teli kullanır; bu, biseps ve triseps gibi kas çiftlerini taklit ederek yapay dirsek ve ayak bileği gibi eklemlerde hızlı, geri döndürülebilir hareket sağlar. Bir SMA telinin yalnızca yaklaşık %8 kadar kısalabileceği göz önüne alındığında, ana tasarım temalarından biri hareket magnifikasyonudur: uzun telleri makara etrafına sarma, bunları eğrili yollar halinde düzenleme, modüler kayar veya döner aşamalar kullanma ya da sıkışık alanlarda daha büyük hareketler elde etmek için SMA yayları benimseme gibi yaklaşımlar kullanılır.
Akıllı telleri itaat etmeye öğretmek
Bu aktüatörleri kontrol etmek zordur çünkü tepkileri hem sıcaklığa hem de mekanik geçmişe bağlıdır. Makale, klasik PID kontrolcülerden daha sofistike şemalara kadar bir dizi kontrol stratejisini gözden geçirir. Model tabanlı yaklaşımlar fizikten türetilmiş denklemler veya histerezis modelleri kullanarak doğrusal olmayan davranışla başa çıkan kayma modu kontrolörleri ve beslemeli telafi ediciler tasarlar. Sinir ağı ve pekiştirmeli öğrenme tabanlı kontrolörler daha ileri giderek mükemmel modellere dayanmak zorunda kalmadan teli hassas hareket için nasıl sürüleceğini öğrenir. Aynı zamanda kendinden algılamalı kontrol yöntemleri, bazen sinir ağlarıyla kombine edilerek, telin değişen direncini dahili bir geri besleme sinyali olarak kullanarak kaba dış sensörlere ihtiyaç duymadan konum veya kuvvet tahmini yapar.
Gerçek dünya kullanımları ve gelecek yönelimleri
Tel şeklindeki SMA aktüatörler zaten yumuşak robot tutucuları, küçük sürünen robotlar, morfing uçak kanatları, uydu serbest bırakma cihazları, implante edilebilir pompalar ve stentler, kalp destek sargıları, kompresyon giysileri, dış iskelet takımları ve rehabilitasyon eldivenlerini çalıştırıyor. Bu alanların tamamında ortak engeller devam ediyor: yavaş soğuma ve ısı birikimi, çok sayıda döngü sonrası yorgunluk, kontrolün karmaşıklığı ve üretim maliyeti. Yazarlar, ilerlemenin üç hattın entegrasyonuna bağlı olacağını savunuyor: daha iyi çok ölçekli ve veri destekli modeller, SMA’ları esnek elektronikler ve çok işlevli malzemelerle birleştiren daha akıllı yapısal tasarımlar ve çevrimiçi uyum sağlayan zeki kontrol stratejileri. Dijital ikizler ve makine öğrenimiyle desteklenen birleşik “modelleme–tasarım–kontrol” çerçevelerinin bu yönleri birlikte eş-optimize edebileceğini öngörüyorlar. Bir okuyucu için mesaj, bu şekil değiştiren tellerin laboratuvar merakından pratik yapay kaslara doğru olgunlaştığı; önümüzdeki yıllarda makineleri, tıbbi cihazları ve giyilebilir sistemleri sessizce yeniden şekillendirme potansiyeline sahip olduğudur.
Atıf: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Anahtar kelimeler: şekil hafızalı alaşım, yumuşak robotik, akıllı aktüatörler, morfing yapılar, giyilebilir cihazlar