Clear Sky Science · tr
Güçle-dengeleme oranı ölçüm moduna dayanan MEMS jiroskoplarının çalışma modları için faz hatası analizi
Neden küçük jiroskoplar önemli
Drone’ları stabilize etmekten otonom araçları yönlendirmeye kadar, MEMS jiroskopları olarak bilinen küçük hareket sensörleri modern cihazların dengede kalmasını ve doğru rotada ilerlemesini sessizce sağlar. Dönmeyi doğru ölçmek için bu çipler dikkatle zamanlanmış elektronik kontrol döngülerine dayanır. Bu makale, bu döngülerin içindeki ince zamanlama uyumsuzluklarının—faz hatası olarak adlandırılan—performansı nasıl bozabileceğini inceliyor ve hangi hataların gerçekten önemli olduğunu ile bunları nasıl düzeltebileceğimizi göstererek jiroskopların hassas ve güvenilir kalmasını sağlamayı amaçlıyor.
Dönmeyi hisseden iki titreşim
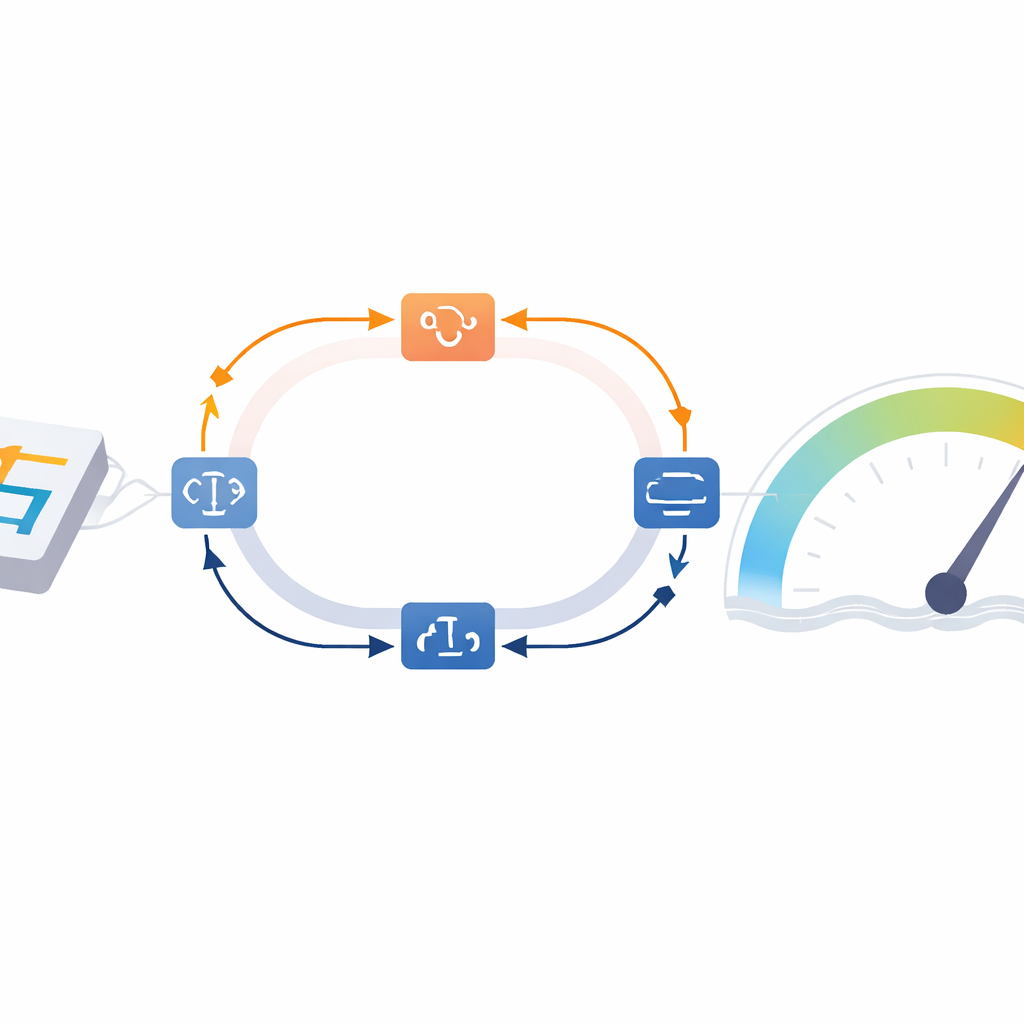
Bir MEMS jiroskopu, küçük bir silikon yapıyı iki dikey yönde titreştirerek çalışır: aktif olarak sallanan bir sürüş modu ve cihaz döndüğünde oluşan yanal itmeyi hisseden bir algılama (sense) modu. Elektronik, sürüş titreşimini sabit tutar ve algılama modunun küçük hareketini bir hız okumasına dönüştürür. Birçok gelişmiş jiroskopta, serbestçe hareket etmesine izin vermek yerine algılama yapısını geri iten bir yöntem olan güçle-dengeleme (force-to-rebalance, FTR) kullanılır: elektronik, hareketi iptal etmek için yeterli düzeltici kuvvet uygular. Uygulanan düzeltici kuvvetin büyüklüğü ardından dönme hızını ortaya koyar. Bu yaklaşım kararlılığı için değerli olmakla birlikte, sinyaller arasındaki hassas zamanlamaya güçlü şekilde bağımlıdır.
Zamanlamanın hataya karıştığı yer
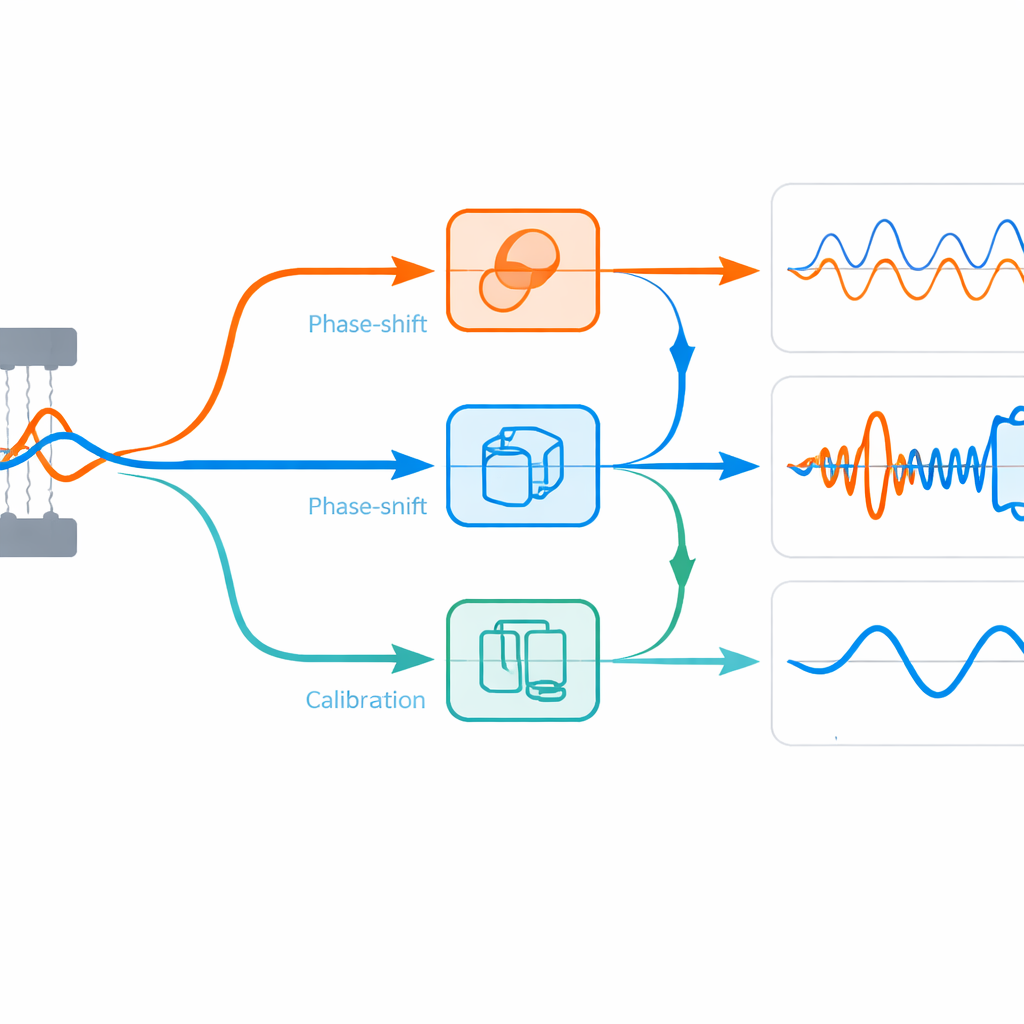
Gerçek cihazlarda sinyaller kapasitans değişimini voltaja çeviren analog devrelerden, bir FPGA çipi içindeki dijital işleme ve analog ile dijitali köprüleyen veri dönüştürücülere kadar gitmelidir. Bu adımların her biri sinyallerin fazını ya da zamanlamasını küçük bir açıyla kaydırabilir. Yazarlar bu faz hatalarını her titreşim yolunda iki basit kategoriye ayırır: sinyalleri ölçme ve işleme sırasında oluşanlar (geribildirim yolu) ve eylem sinyallerini üretirken oluşanlar (ileriye yol). Ardından hem modlardaki her iki yolu da içeren FTR kontrol döngülerinin tam bir matematiksel modelini kurar ve bu tür hataların bias, ölçek faktörü, bant genişliği ve istenmeyen eşleşmeyi iptal etme yeteneği (kuadratur hatası) gibi temel performans ölçülerini nasıl etkilediğini analiz eder.
Sürüş tarafını incelemek: çoğunlukla zararsız
Sürüş tarafında faz hataları kontrol döngüsünün yapıyı gerçek doğal frekansından biraz uzak bir yerde kilitlemesine neden olur. Titreşim seviyesini sabit tutmak için elektronik, sürüş genliğini artırarak yanıt verir. İçgüdüsel olarak bu endişe verici görünebilir; çünkü daha güçlü bir sürüş, elektriksel sızıntı olarak algılama yoluna karışabilir. Ancak burada incelenen jiroskop, yüksek frekanslı bir taşıyıcı ve bu sızıntıyı büyük ölçüde bastıran halka diyotlarıyla dikkatle tasarlanmış bir ön uç devresine sahiptir. Simülasyonlar ve üç farklı sıcaklıkta yapılan ayrıntılı deneyler, cihaz ısındıktan sonra sürüş döngüsü faz hatalarının neredeyse sabit değerlere yerleştiğini ve basit kalibrasyon sonrasında bias, gürültü, kuadratur düzeltmesi veya FTR bant genişliği üzerinde önemsiz etkisi olduğunu göstermektedir.
Algılama tarafı zamanlaması: gerçek belalı
Algılama modu farklı bir tablo sunar. Burada titreşen kütleye geri itme yapan geribildirim sinyali ile hız ve kuadratur bileşenlerini çıkarmak için kullanılan referans sinyallerin sıkı bir hizalanmaya sahip olması gerekir. Yazarlar, algılama geribildirim yolunda bir faz hatasını ve ileri demodülasyon yolunda bir diğerini açıkça dahil eden bir FTR döngü modeli türetir. Hem analitik hem de deneysel olarak gösterirler ki geribildirim-yolu faz hatası doğrudan ölçek faktörünü—gerçek dönme ile ölçülen çıktı arasındaki dönüşümü—değiştirir ve idealde jiroskop hareketsizken kusursuz sabit olması gereken sıfır-hız çıktısını kötüleştirir. Buna karşılık, ileri-yol faz hatası bu statik özellikler üzerinde sadece küçük bir etkiye sahiptir ve her iki algılama tarafı hatası da dinamik bant genişliği üzerinde çok az etki yapar.
En çok önemli olanı kalibre etmek
Bu bulgulara dayanarak ekip pratik kalibrasyon prosedürleri önerir. Sürüş modu için, dahili referans dalgaları ile gerçek sürüş sinyali arasındaki faz farklarını ölçerler, ardından sinyaller ortogonal hale gelene ve sürüş genliği minimuma düşene kadar dijital fazları ayarlarlar; böylece hem ileri hem de geribildirim faz hataları ortaya konur ve iptal edilir. Algılama modu için önce kritik geribildirim-yolu hatasını düzeltmek üzere geribildirim sinyalini bir referans ile hizalarlar. Ardından kuadratur sinyalini kasıtlı olarak yükselterek fazının baskın olmasını sağlarlar; bu, kalan ileri-yol fazını hassas biçimde ayarlamayı kolaylaştırır. Sıcaklıklar arası testler, bu düzeltmelerin koşullar değiştiğinde yeniden tahmin edilmesi gereken sabit ofsetler gibi davrandığını, ancak bir kez ayarlandıklarında ölçek faktörü ve biası büyük ölçüde stabilize ettiklerini gösterir.
Bu gelecekteki sensörler için ne anlama geliyor
Düz bir ifadeyle, bu çalışma bir MEMS jiroskopundaki tüm zamanlama hatalarının eşit derecede önemli olmadığını gösterir. Sızıntı dikkatle bastırıldığında, sürüş döngüsündeki ve algılama ileri yolundaki faz hataları nihai dönme okuması üzerinde çok az etkiye sahiptir. Baskın suçlu, algılama geribildirim yolundaki faz hatasıdır; bu, dönmeyi ölçmek için kullanılan “cetvele” doğrudan eğme ve hareketsizken okuma değerini kaydırma eğilimindedir. Bu zayıf halkayı belirleyip hedefe yönelik kalibrasyon stratejileri sunarak, çalışma çalışırken daha iyi kararlılığa sahip jiroskop tasarımları için bir yol haritası sağlar ve sıcaklık ve diğer koşullar değişse bile doğruluğu koruyabilecek gerçek zamanlı telafi şemalarının önünü açar.
Atıf: Jia, J., Zhang, H., Gao, S. et al. Phase error analysis for MEMS gyroscopes operational modes based on force-to-rebalance rate measurement mode. Microsyst Nanoeng 12, 86 (2026). https://doi.org/10.1038/s41378-025-01144-6
Anahtar kelimeler: MEMS jiroskopu, güçle-dengeleme kontrolü, faz hatası, sensör kalibrasyonu, atalet navigasyonu