Clear Sky Science · sv
Hjärninspirerad probabilistisk ockupansgridmappning med vektorsymboliska arkitekturer
Robotar som ser världen som ett lapptäcke
Varje självkörande bil, lagerrobot eller hemmastädrobot behöver en snabb mental bild av sin omgivning: vad som är fast, vad som är tomt och vad som fortfarande är okänt. Denna artikel presenterar ett nytt sätt för robotar att bygga den bilden—kallad en ockupansgridkarta—som lånar idéer från hur hjärnor kan representera information, med målet att behålla kartornas noggrannhet samtidigt som beräkningarna blir betydligt snabbare och mer effektiva.
Att förvandla råa sensorpings till en världskarta
Robotar använder ofta laserskannrar eller andra avståndssensorer för att undersöka världen under rörelse och samlar punktmoln som visar var objekt finns och var det är fritt. En klassisk teknik, ockupansgridmappning, delar upp miljön i små celler, som pixlar på en skärm, och tilldelar varje cell en sannolikhet för att vara ockuperad. Traditionella metoder behandlar detta som ett tungt statistiskt problem, spårar osäkerhet noggrant men förbrukar mycket tid och minne. Nyare neurala nätverksmetoder är snabbare och kan fylla i luckor, men beter sig ofta som svarta lådor, kan vara svåra att lita på i säkerhetskritiska sammanhang och måste vanligtvis tränas om för varje ny miljö.
En hjärninspirerad mellanväg
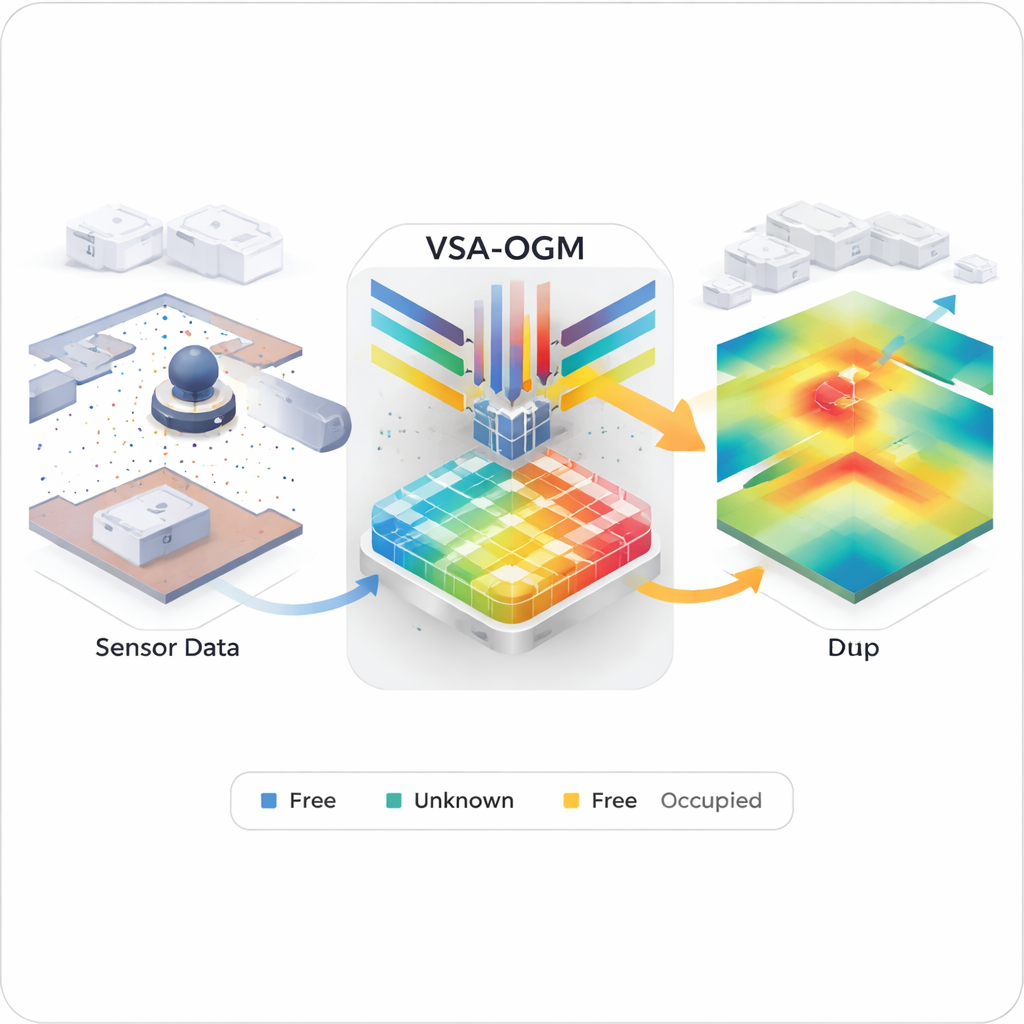
Författarna föreslår ett "neuro-symboliskt" kompromiss som kallas VSA-OGM, en förkortning för Vector Symbolic Architecture Occupancy Grid Mapping. Istället för att lagra varje detalj i ett tätt rutnät eller begrava struktur i miljontals neurala nätverksvikter kodar metoden sensoravläsningar som mycket långa vektorer i ett högdimensionellt rum—en matematisk idé inspirerad av teorier om hur grupper av neuroner kan representera begrepp och positioner. Miljön delas in i flikar, och varje flik har vektor-minnen för bevis som är "ockuperade" respektive "tomma". När roboten rör sig och samlar punktmoln konverteras varje observation till en av dessa hyperdimensionella vektorer och buntas in i lämpligt flikminne, vilket effektivt ackumulerar information över tid.
Från brusiga vektorer till tydliga kartor
Naturligtvis riskerar sammanslagning av många signaler i ett enda högdimensionellt minne att skapa en brusig, svåravläst massa. VSA-OGM tar itu med detta med en noggrant utformad avkodningspipeline. Först jämförs flikminnena med vektorer som representerar positioner i rummet, vilket ger grova "kvasi-sannolikheter" för ockupans. Därefter tillämpas en serie icke-linjära steg och ett verktyg från informationsteorin, Shannon-entropi, för att urskilja var data starkt stödjer den ena klassen framför den andra. Slutligen används en softmax-funktion för att omvandla dessa signaler till verkliga sannolikheter och kombineras till en slutlig karta som visar den signerade skillnaden mellan "ockuperad" och "tom". Resultatet är ett jämnt ockupansgrid som interpolerar över glest uppmätta områden samtidigt som det förblir fullt probabilistiskt och tolkbart.
Snabbare kartor för en robot—eller många
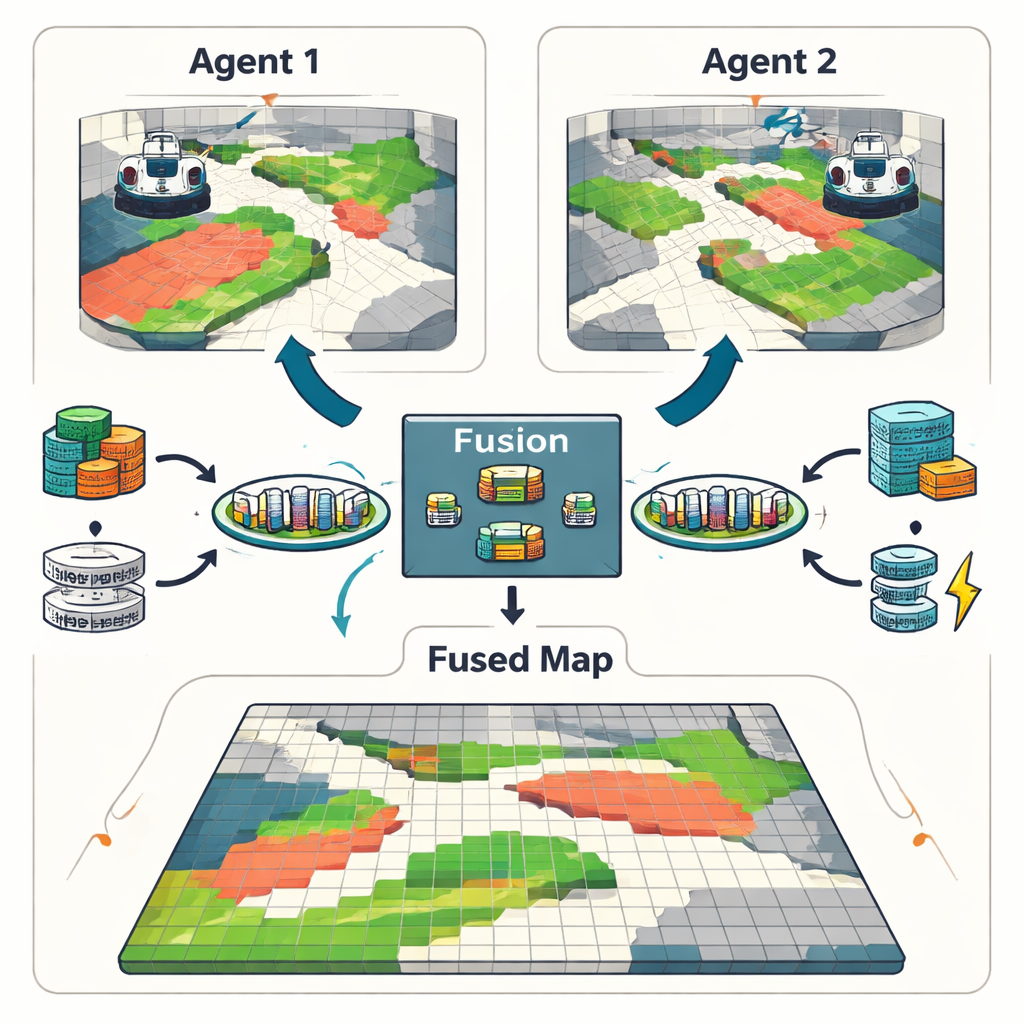
För att testa sitt tillvägagångssätt körde forskarna VSA-OGM på flera simulerade och verkliga datamängder, inklusive en klassisk inomhuskarta för robotar och ett storskaligt körscenario. Jämfört med starka traditionella baslinjer som noggrant modellerar rumsliga korrelationer uppnådde VSA-OGM likvärdig kartnoggrannhet men använde ungefär 400 gånger mindre minne och körde upp till 45 gånger snabbare. Jämfört med strömlinjeformade traditionella metoder som släpper vissa statistiska detaljer matchade det fortfarande noggrannheten samtidigt som latenstiden minskade med ungefär en faktor fem. När det utvärderades mot ett neuralt nätverkssystem som kräver timmars träning och miljontals parametrar levererade VSA-OGM jämförbar kartkvalitet utan förträning och reducerad tidsåtgång per bildruta med upp till sex gånger. Ramverket stödjer också flera robotar: vektorminnen från olika agenter kan enkelt adderas, vilket ger sammanslagna kartor med liten informationsförlust.
Vad detta betyder för vardagliga robotar
Enkelt uttryckt visar detta arbete att robotar inte behöver välja mellan långsam men pålitlig matematik och snabb men ogenomskinlig neurala nätverk när de bygger kartor över världen. Genom att använda hjärninspirerade högdimensionella vektorer behåller VSA-OGM den tydliga probabilistiska strukturen hos klassiska metoder samtidigt som det når den hastighet och effektivitet som krävs för realtidsdrift på begränsad hårdvara. Det finns fortfarande utmaningar—såsom att hantera extremt ojämna data och mycket täta miljöer—men tillvägagångssättet pekar mot framtida robotar som säkert och pålitligt kan förstå sin omgivning, även när de körs på blygsamma omborddatorer.
Citering: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Nyckelord: ockupansgridmappning, autonoma robotar, vektorsymboliska arkitekturer, probabilistisk kartläggning, LiDAR-sensorik