Clear Sky Science · sv
Beteendemässiga bevis för hierarkisk utförande av sekventiella rörelser
Hur våra hjärnor förvandlar enkla rörelser till flytande handlingar
Vardagliga uppgifter som att skriva på ett tangentbord, spela en pianoskala eller sträcka sig efter flera föremål på ett bord känns lättsamma. Men bakom kulisserna måste hjärnan länka ihop många små rörelser till smidiga, koordinerade handlingar. Den här studien ställer en till synes enkel fråga: planerar hjärnan alltid sådana handlingskedjor som en enda lång rörelse, eller bygger den dem steg för steg med en dold hierarki av mindre byggstenar?
Räckande mot stora mål på ett bord
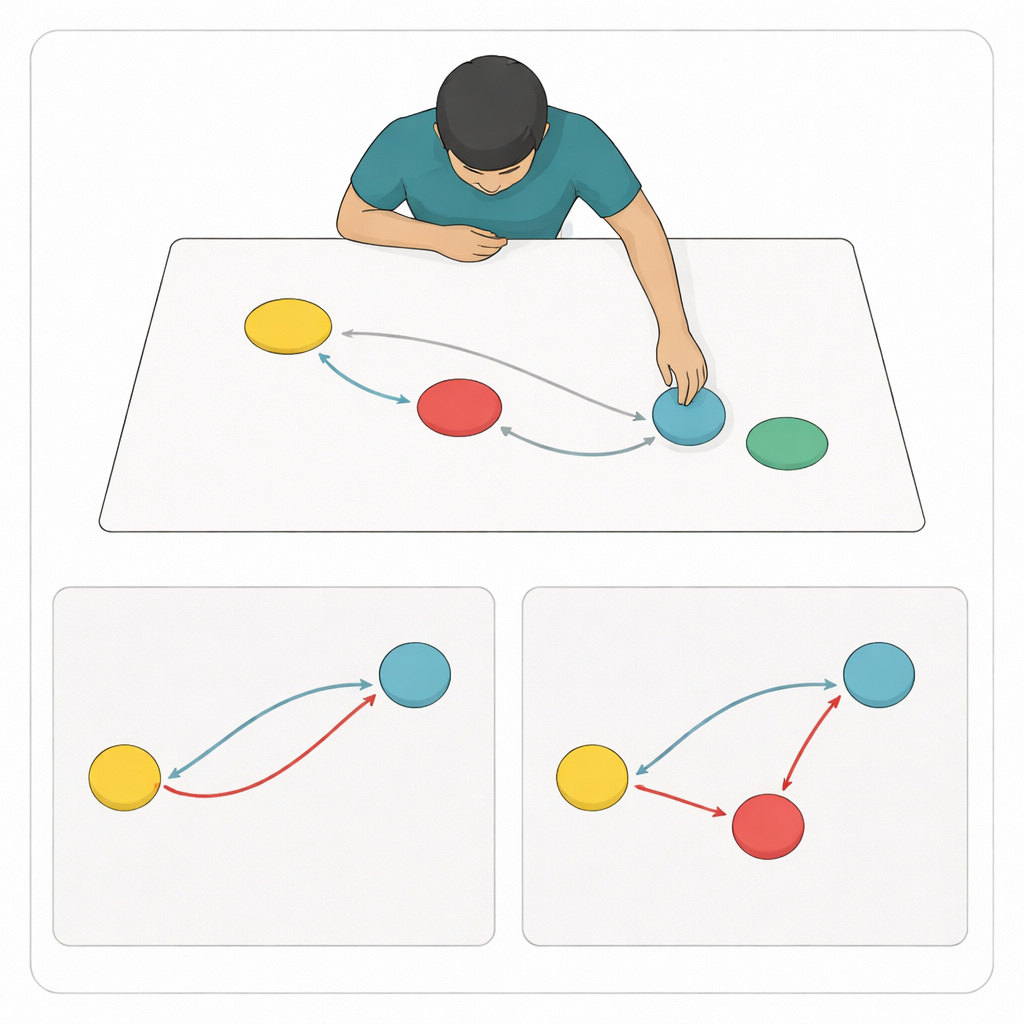
För att undersöka detta designade forskarna ett bordsbaserat spel av typen “koppla prickarna” för handen. Tjugo frivilliga satt vid ett bord med flera stora färgade cirklar tryckta på ytan. En startcirkel låg nära kroppen, med andra cirklar placerade till vänster, höger och ovanför. I varje försök hörde deltagarna ett ljud och var tvungna att flytta fingertoppens spets från startcirkeln genom en kort följd av mål och tillbaka igen, så snabbt som möjligt men utan extrem precision: det räckte att fingertoppen landade någonstans inne i varje cirkel. Denna lågprecisionsinställning uppmuntrade människor att röra sig snabbt och flytande, vilket lät deras banor böja och smälta samman mellan målen istället för att stanna tvärt vid varje mål.
Avläsa dolda planer ur handens kurvor
I stället för att mäta hur lång tid folk tog eller hur ofta de gjorde fel fokuserade teamet på den exakta formen av varje fingertoppsbana. De tittade på två nyckelfunktioner. För det första “mellanböjning”: hur mycket banan mot ett mål drev mot nästa mål innan den faktiskt nådde det. För det andra “att svänga runt ett mål”: hur skarpt eller mjukt banan böjde sig när den passerade nära ett mål och ändrade riktning. Tillsammans avslöjar dessa mönster om en rörelse mot ett mål redan tar nästa mål i beaktande — en effekt kallad “koartikulation”, liknande hur munnen formar kommande ljud när du talar. Forskarna jämförde dessa uppmätta kurvor med banorna som producerades av två datormodeller för rörelseplanering, båda förankrade i etablerade teorier om optimal kontroll men med olika inre struktur.
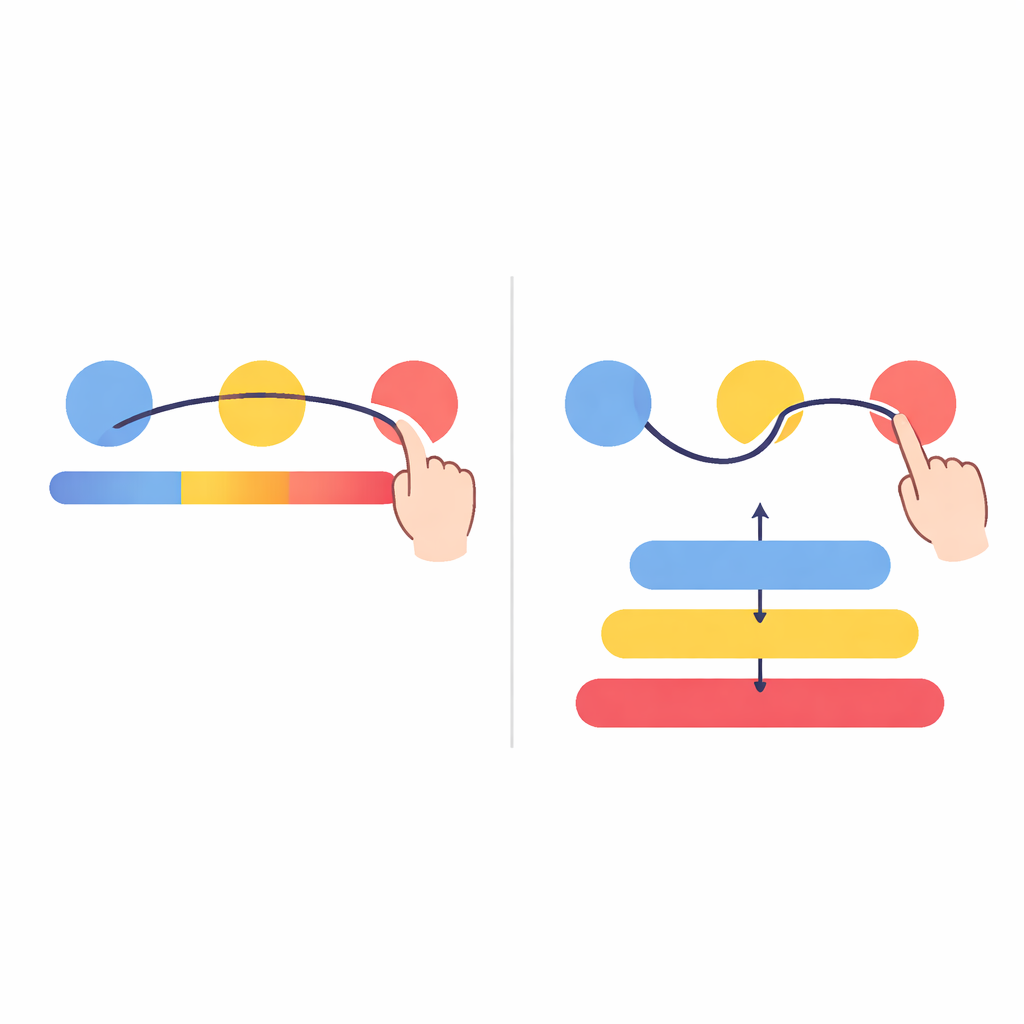
Platta planer kontra lagerlagda planer
I den “platta” modellen föreställer man sig att hjärnan planerar hela tre-målssekvensen som en enda, enhetlig bana innan handen börjar röra sig. Detta liknar en helt inlärd gest eller ett “chunk” som utförs i ett stycke. I det fallet är mellanböjning och sväng runt målen tätt kopplade: när planläggaren bestämt hur starkt den ska sikta mot det första målet, bestäms till stor del hur kurvorna kommer att se ut genom hela sekvensen. Den “hierarkiska” modellen, däremot, lägger till ett enkelt mellanlager som sammanfogar mindre bitar — såsom en två-målsrörelse följd av en en-målsåtergång — i farten. Ett separat dynamiskt system bestämmer när man ska byta från en undermotion till nästa, vilket tillåter formen runt varje mål att justeras mer oberoende samtidigt som helheten hålls smidig.
Beteende som ser hierarkiskt ut
När forskarna körde många simuleringar fann de att den platta modellen helt enkelt inte kunde frambringa vissa kombinationer av mellanböjning och sväng som försökspersonerna naturligt producerade. Särskilt visade människor ofta stark böjning mot det andra målet i den första delen av rörelsen, men gjorde ändå en skarp eller annorlunda formad sväng runt det andra målet — mönster som den platta planläggaren inte kunde matcha. Den hierarkiska modellen kunde däremot återskapa dessa blandade beteenden genom att dynamiskt länka separata “underrörelser” vid de mellanliggande målen. Genom att jämföra de verkliga data mot båda modellerna drog författarna slutsatsen att nästan hälften av alla registrerade rörelsesekvenser tydligt krävde en hierarkisk förklaring, medan andra var förenliga med platt planering, vilket tyder på att människor flexibelt växlar strategi beroende på sekvensen.
Vad detta betyder för vardaglig skicklighet
Resultaten tyder på att även utan lång träning eller högt specialiserade rutiner förlitar sig våra hjärnor ofta på lagerlagda planer när de sammanfogar enkla räckningar. Istället för att alltid komprimera en sekvens till ett enda, stelbent chunk verkar det motoriska systemet hålla återanvändbara rörelsebitar tillgängliga och länka dem i realtid. Vid träning kan sådana kedjor gradvis kollapsa till plattare, fullt “chunkade” handlingar, vilket hjälper till att förklara hur färdigheter blir så snabba och automatiska. Detta arbete ger ett nytt, geometri-baserat fönster in i hur hjärnan organiserar rörelse, vilket kan vägleda framtida forskning om motoriskt lärande, rehabilitering och designen av robotar som rör sig med liknande adaptiv grace.
Citering: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Nyckelord: motorisk kontroll, rörelseplanering, chunking, hierarkiskt beteende, sekventiella räckningar