Clear Sky Science · sv
Brottbaserat grepp: dynamisk påverkan möjliggör förutsägbar robotförankring i sötvattensis
Att klättra där gravitationen knappt finns
Föreställ dig att försöka klättra uppför en frusen klippa där gravitationen är så svag att din egen vikt inte hjälper dina kängor att fästa. Det är den utmaning som framtida robotar som skickas till isiga månar som Saturnus måne Enceladus står inför, där forskare hoppas söka efter tecken på liv i djupa isventiler och grottor. Denna artikel beskriver ett nytt sätt för robotar att greppa tag i is genom snabba, hammarliknande slag och ett fast nypgrepp, inspirerat av isyxa från bergsbestigare. Resultatet är ett lätt ankarsystem som använder avsevärt mindre kraft och energi än dagens isborrar eller uppvärmda sylar, vilket potentiellt gör tidigare otillgängliga isiga världar mer åtkomliga.

Varför det är så svårt att hålla fast i is
På jorden kan en klättrare luta hela sin vikt mot en isborr eller yxa för att få den att bita i ytan. På Enceladus är gravitationen bara omkring en procent av jordens, så en robot kan inte förlita sig på sin vikt för att trycka verktyg in i isen. Befintliga alternativ har alla stora nackdelar. Isborrar kräver stora tryckkrafter för att börja bita sig in—så stora att en robot på Enceladus kanske skulle behöva väga lika mycket som en stor Mars-rover för att använda dem effektivt. Uppvärmda ”termiska sylar” kan smälta sig fast med mycket lite tryck, men de förbrukar enorma mängder energi varje gång de används, en allvarlig begränsning för rymdfarkoster som opererar långt från solen. Samtidigt förlitar sig många moderna klätterrobotar på skrovliga stenformationer, vakuumkopplingar eller speciella adhesiver, som alla har svårt med de släta men vågiga former som finns på naturlig glaciäris.
Låna ett knep från mänskliga isklättrare
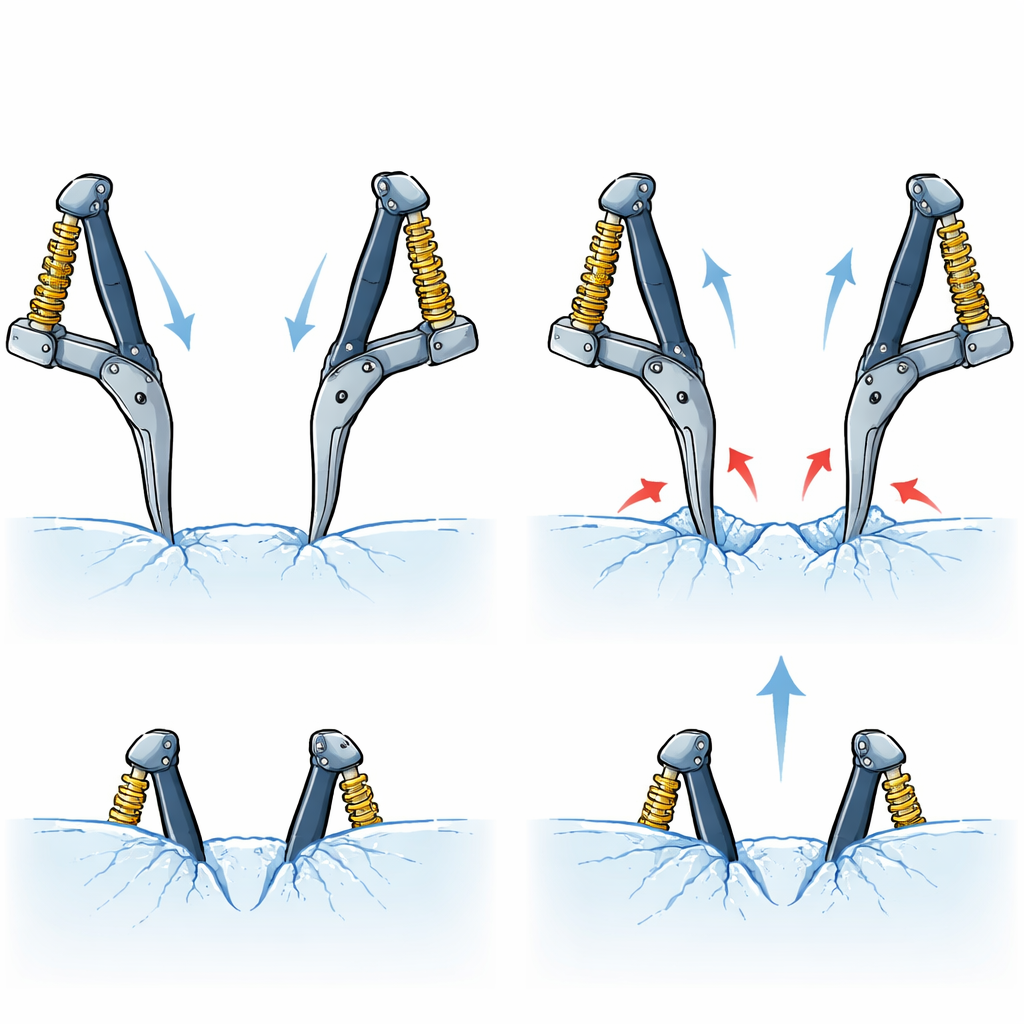
Författarna föreslår en annan strategi: istället för att anpassa sig till isytan, skapa egna grepppunkter. Deras enhet använder två små isyxor monterade på ett kompakt gripdon. Först spänns fjädrar inuti armarna och lagrar en modest mängd mekanisk energi. När de släpps svänger yxorna som små hammare och träffar isen, och mejslar ut små gropar. Därefter pressar samma mekanism yxorna mot varandra så att spetsarna hakar i de nya inbuktningarna. Denna tvåstegsprocess—påverkan, sedan grepp—förvandlar ett slätt isstycke till något som roboten kan hålla i, och den kan enkelt reverseras så att roboten kan ta ett nytt ”steg”. Hela cykeln drivs av en enda motor som både laddar fjädrarna och drar åt greppet.
Testa fysiken bakom greppet
För att säkerställa att detta tillvägagångssätt skulle fungera pålitligt byggde teamet matematiska modeller för hur djupt yxspetsarna skulle borra in och hur mycket de kunde fjädra tillbaka efter slagen. De testade sedan enskilda yxor som svängde som pendlar in i block av sötvattensis nedkylda till typiska glaciärtemperaturer. Genom att jämföra teori och experiment fann de att modellerna kunde förutse hur djupt en grop skulle bildas och uppskatta den ”rekyl”energi som uppstår när yxan fjädrar tillbaka. Med hjälp av dessa resultat beräknade de hur hårt en robot måste trycka gripdonet mot isen innan svingen, så att yxorna stannar kvar i sina nya gropar istället för att hoppa ut. För deras valda fjäderenergi förutspådde modellen att ungefär 16 newton tryck—ungefär vikten av ett par liter vatten på jorden—skulle ge nästan säker framgång.
Från laboratoriebänk till glaciärvägg
Med modellerna i handen testade forskarna det fullständiga dubbel-yx gripdonet. I laboratoriet bekräftade de att slag med lagrad fjäderenergi på 8 joule kunde skapa tillräckligt djupa gropar samtidigt som de krävde avsevärt mindre initialt tryck än isborrar och avsevärt mindre energi än termiska ankare. De mätte sedan hur starkt det slutliga greppet var genom att dra enheten rakt av isen. Genom att justera hur hårt yxorna pressade mot varandra upptäckte de två sätt som greppet kunde misslyckas på: vid lågt tryck gled spetsarna ur groparna; vid mycket högt tryck bröts själva isavsatserna loss. Mellan dessa ytterligheter fanns en optimal punkt där gripdonet kunde bära mer än dubbla sin egen vikt. Fälttester på en fransk glaciär visade att enheten kunde ankra på brant, naturlig is, hård snö och till och med trädstammar, stenar och hårdpackad jord, vilket bekräftar att påverkan-och-grepp-metoden fungerar utanför laboratoriet.
Vad detta betyder för framtida upptäcktsresande
Studien visar att spricka och nypa in i is kan vara ett mycket effektivt sätt för robotar att klättra och hålla stadigt i hårda, låggavitetmiljöer. Genom att utnyttja det faktum att spräckbildning i is använder mycket mindre energi än att smälta den, bildar dubbel-yx gripdonet starka, reversibla ankare med måttliga krafter och endast några joule energi per steg. För uppdrag till Enceladus eller andra isiga världar skulle ett sådant system kunna låta små, energibegränsade robotar säkert sänka sig ner i ventiler eller hänga på klippväggar medan de provtar material som kan avslöja om liv existerar bortom jorden. Samma idé kan också hjälpa jordbaserade robotar att utforska glaciärer, isiga grottor och spröda klippväggar som är för farliga eller otillgängliga för mänskliga klättrare.
Citering: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Nyckelord: robotisk isbestigning, planetutforskning, robotgripdon, isbrottsankring, Enceladus-uppdrag