Clear Sky Science · sv
Konkret fleragentssökplanering som möjliggör kinodynamiskt aggressiva manövrar
Robotar som kan dansa genom trafiken
Föreställ dig dussintals flygande och körande robotar som susar runt i ett lager utan att kollidera, och som slutför sina uppgifter snabbare än vad mänskliga förare skulle klara. Denna artikel beskriver ett nytt sätt att koreografera sådan robot"trafik" så att många maskiner kan röra sig aggressivt och snabbt i trånga utrymmen samtidigt som de förblir säkra. Arbetet är betydelsefullt eftersom samma idéer en dag kan driva robotflottor i fabriker, lager och leveranstjänster som måste arbeta dygnet runt i vår vardag.
Varför det är så svårt att styra många robotar
Att samordna en skara robotar är mycket svårare än att styra en enda. Varje robot måste ta sig från sin startpunkt till sitt mål utan att krascha, blockera andra eller fastna i ändlösa loopar. Dagens tillvägagångssätt tenderar att hamna i två extremer. Vissa metoder behandlar robotar som spelpjäser på ett rutnät, vilket gör planeringen för hundratals snabba och matematiskt prydliga—men de resulterande banorna ignorerar ofta hur verkliga maskiner rör sig, accelererar eller svänger. Andra metoder simulerar full fysisk rörelse och producerar vackra, mjuka banor, men blir smärtsamt långsamma eller opålitliga när antalet robotar växer bortom ett fåtal.
En mellandag: "konkret" planering
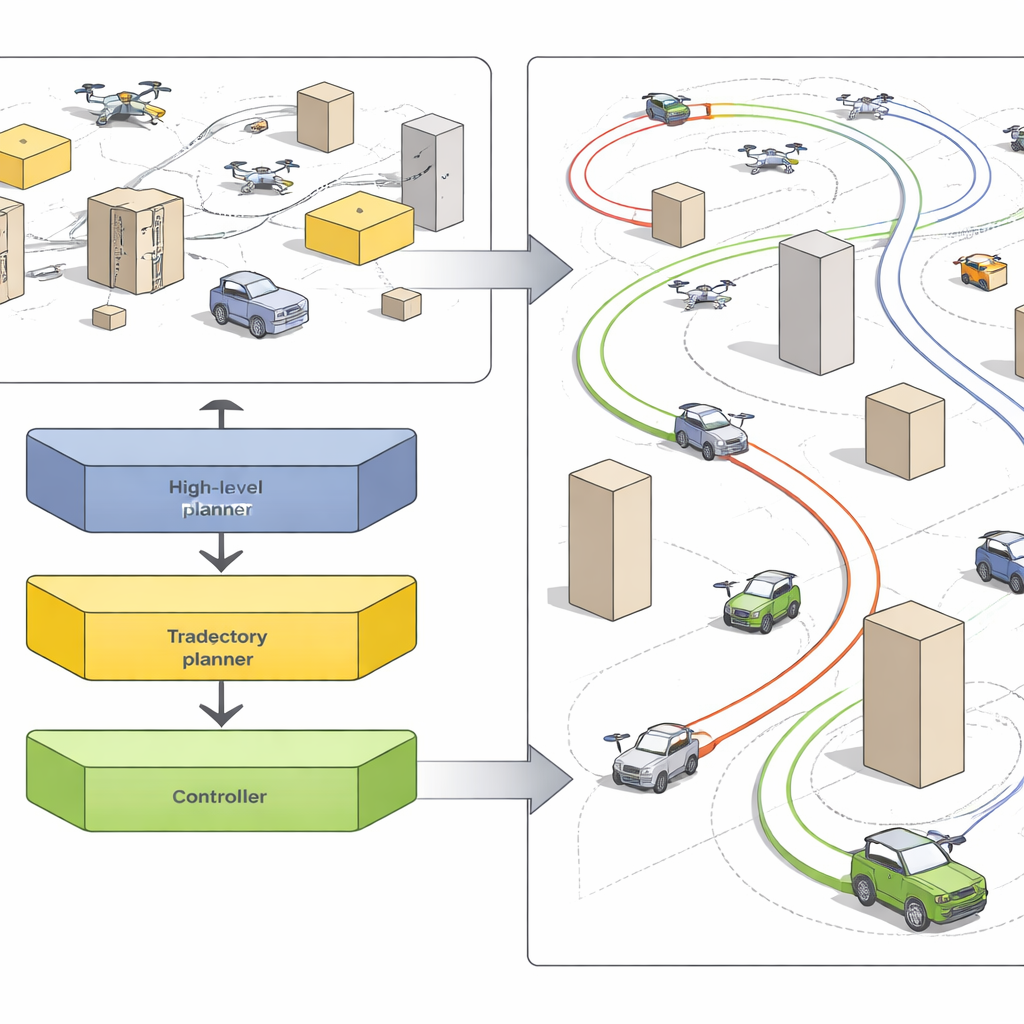
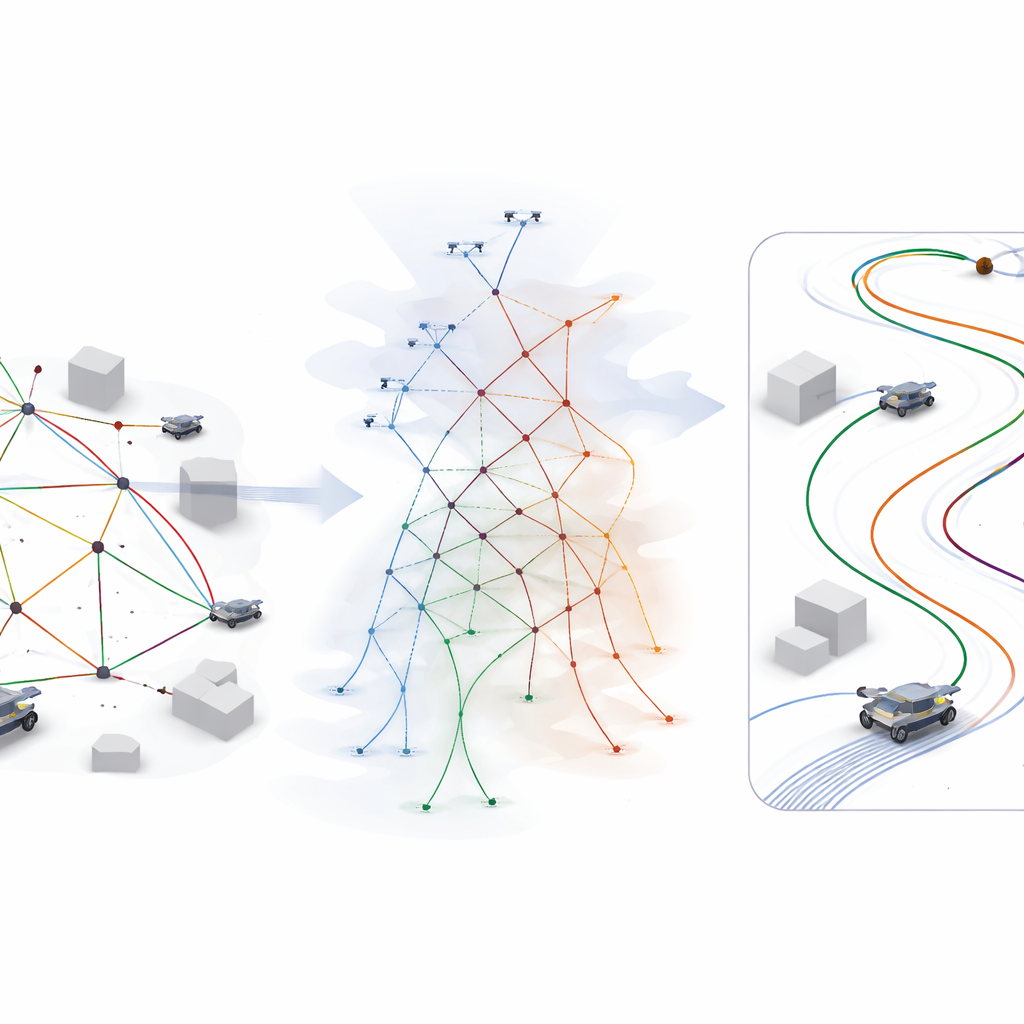
Författarna föreslår en hybridstrategi som de kallar "konkret" fleragentssökplanering. Idén är att blanda den skarpa strukturen hos rutnätsbaserad planering med en realistisk bild av hur robotar faktiskt rör sig. Istället för att arbeta enbart i ett abstrakt rutnät eller i fullständigt kontinuerlig fysik använder systemet en lagerindelad beskrivning av rörelse. En central planerare söker över en diskret mängd möjliga drag för alla robotar samtidigt, men varje drag berikas med prognoser om hur lång tid det kommer att ta, hur roboten kan svikta från sin avsedda bana och hur nära den säkert kan passera andra. Dessa förutsägelser kommer från datadrivna modeller tränade på riktiga robotexperiment, så planeraren "veta" hur dess flotta tenderar att bete sig i praktiken.
Från grova skisser till precis rörelse
När den sammankopplade planeraren har producerat säkra, konfliktfria vägpunktsekvenser för varje robot zoomar ramverket in. En andra modul förvandlar varje grov bana till en tät, jämn trajektoria som respekterar begränsningar för drivkraft, styrning och andra fysiska faktorer. För att göra detta snabbt använde författarna först tung numerisk optimering offline för att generera många exempel på nästintill tidsoptimala rörelser, och tränade sedan transformerbaserade neurala nät för att efterlikna dessa exempel. I körning kan dessa nät generera högkvalitativa referensbanor på mindre än en millisekund. Ett tredje lager, en model predictive controller utrustad med ett säkerhetsfilter, justerar konstant styrningen för att följa dessa referenser och använder lokal sensornsinformation för att parera överraskningar, såsom en vandrande hinder eller liten följningsavvikelse.
Provkörning med fyrtio robotar
Teamet demonstrerade sitt system med en blandad flotta bestående av 20 quadrotordroner, 8 markrobotar och 12 robotar som agerade rörliga hinder, alla i drift tillsammans i en rumsliknande inomhusarena. I en uppsättning experiment tävlade svärmar av drönare genom trånga utrymmen med topphastigheter över fem meter per sekund samtidigt som de undvek varandra i en slags tredimensionell balett. I ett annat korsade markrobotarna upprepade gånger ett rörigt område med slumpmässigt rörliga hinder, och genomförde fler uppdrag, med färre stopp och inga kollisioner, än konkurrerande metoder. De mest krävande försöken involverade alla 40 robotar som körde flera uppdrag i sekvens, med systemet som kontinuerligt omplanerade banor vid behov utan fastlåsningar eller krascher.
Tecken på framtida leverans- och lagersystem
För att visa hur detta kan översättas till verkliga uppgifter iscensatte författarna simulerade "sista milen"-leveranser och lageroperationer. I leveransscenariot transporterade markrobotar drönare till en "flodbank", där drönarna tog av, flög till utspridda avlämningspunkter, återvände till sina mobila baser och sedan åkte tillbaka till startområdet—allting medan de undvek rörliga hinder. I lagersimuleringen förde team av drönare upprepade gånger virtuella paket mellan hyllor och leveranszoner, och höll tät, smidig rörelse och hög genomströmning. Dessa fallstudier krävde endast mindre justeringar av ramverket, vilket understryker dess förmåga att anpassa sig till nya plattformar och uppdrag.
Vad detta betyder framöver
Enkelt uttryckt visar detta arbete att det är möjligt att låta stora team av robotar röra sig både vågat och säkert i trånga, föränderliga miljöer genom att noggrant kombinera snabb hög-nivåplanering, realistiska rörelsemönster och sista utvägens säkerhetskontroller. Den "konkreta" metoden förvandlar abstrakta planer till rörelser som verkliga maskiner kan utföra i hög hastighet, samtidigt som den fortfarande ger garantier mot kollisioner och fastlåsningar i många praktiska situationer. Även om extremt kaotiska miljöer och helt okända utrymmen fortfarande är utmanande, pekar ramverket mot en framtid där flottor av leveransdroner, lagerlöpare och andra robotar kan dela trånga miljöer utan ständig mänsklig övervakning.
Citering: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Nyckelord: koordination av flera robotar, ruttplanering, robotsvärmar, lagerautomation, dronleveranser