Clear Sky Science · sv
Insektsinspirerad adaptiv beteendekompenseringsstrategi mot olfaktorisk sensorbrist för robotisk lokalisering av doftkällor
Varför förlust av en sensor inte betyder att man förlorar spåret
Föreställ dig en sök- och räddningsrobot som försöker sniffa upp en gasläcka eller en tillfångatagen överlevande i en kollapsad byggnad — och sedan går en av dess viktiga sensorer sönder. Dagens robotar misslyckas ofta kraftigt under den typen av skada. Denna studie hämtar inspiration från en överraskande expert på luktbaserad navigation, den manliga silkmotten, för att visa hur djur kan fortsätta spåra en doftkälla även efter att ha förlorat halva sin ”näsa”, och hur den strategin kan kopieras i fyrbenta robotar.
En liten navigatör med ett kraftfullt luktsinne
Många djur — från insekter till hundar — använder luftburna kemiska signaler för att hitta mat, partner eller säkra skydd. Dofter är särskilt användbara när sikten blockeras av mörker, rök eller spillror. Men verkliga doftplumer är röriga: vinden skiftar, byggnader och träd böjer flödet, och den starkaste lukten ligger inte alltid direkt uppvind från källan. De flesta doftjaktande robotar antar att alla deras doftsensorer fungerar perfekt och att lukt- och vindriktningar stämmer väl överens. I naturen gäller inget av dessa antaganden. Silkmotten Bombyx mori erbjuder ett naturligt motexempel: hanarna kan lokalisera honor som avger feromoner även i turbulent luft och, intressant nog, även när en av deras två antenner — deras huvudsakliga luktorgan — tas bort.
Hur möter malar utmaningen efter att ha förlorat en antenn
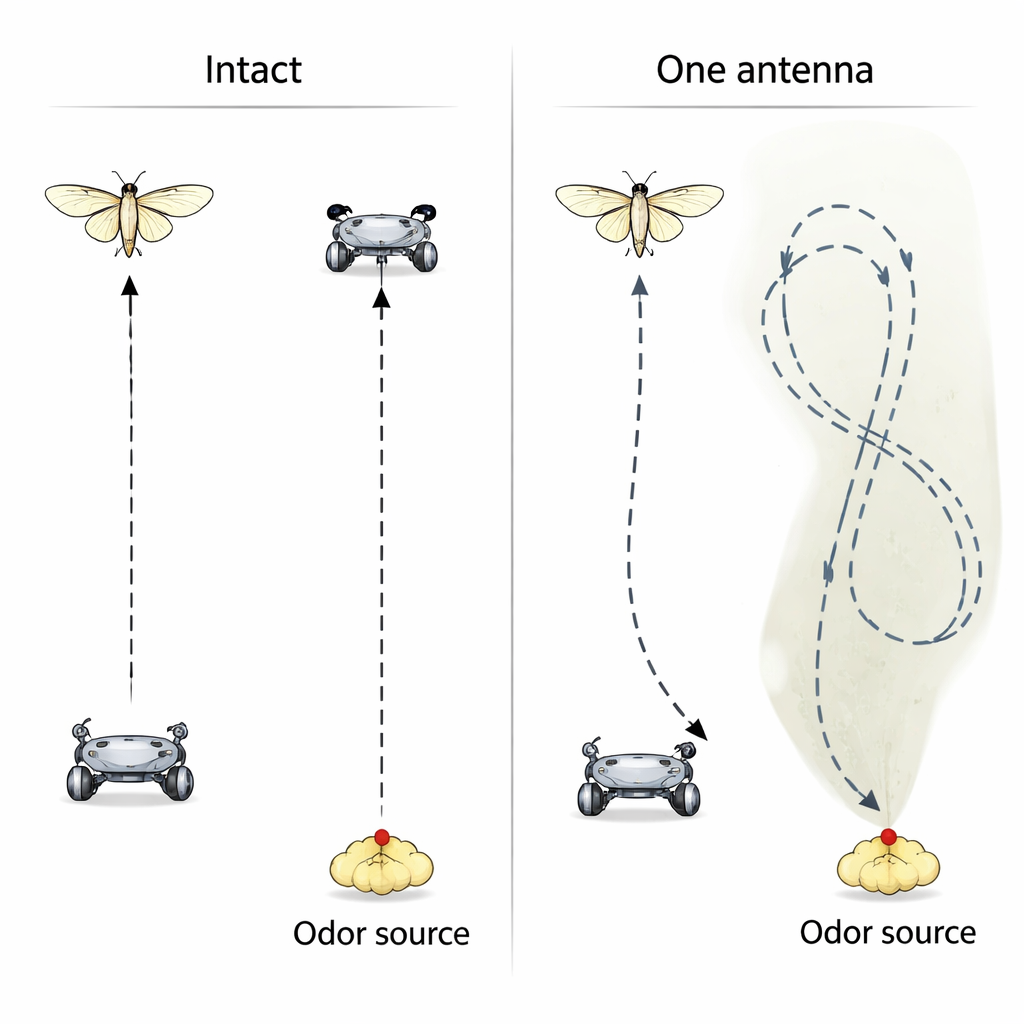
Forskarna testade först hur väl intakta manliga silkmotor och motor med vänster antenn borttagen kunde gå mot en doftkälla i ett laboratorium. Båda grupperna startade 15 centimeter från en punkt som avgav feromon. Överraskande nog sjönk inte framgångsfrekvensen — att nå källan inom en minut — signifikant efter att en antenn tagits bort. Det som förändrades var banan: intakta malar tenderade att marschera längs en ganska rak rutt, medan enantennade malar tog längre, mer slingrande vägar som krökte mot sidan med den kvarvarande antennen. Detaljerade mätningar av huvudrörelser avslöjade att malarna bytte sin svängstrategi beroende på var längs den kvarvarande antennen doften detekterades — nära basen eller nära spetsen — och i vilken riktning de för närvarande svängde.
Två enkla regler dolda i komplext beteende
Genom att upprepade gånger pulsera doft från vänster och höger och spåra malarnas huvudvinklar omvandlade teamet beteendet till sannolikhetskurvor som visar hur sannolikt det var att en mal skulle svänga vänster eller höger efter varje puff. När en doft träffade nära antennens bas föredrog malen starkt att fortsätta rotera mot samma sida, vilket i praktiken innebar att den beslutade sig för att följa den pågående svängen. När doften träffade nära spetsen blev valet mer balanserat, med en svag bias att utforska motsatta sidan. Enkelt uttryckt fick antennförlust inte malen att ge upp; den fick malen att anta ett sökmönster som provtar båda sidor av rummet mer brett, särskilt längs ”kanten” av doftplumen där luktintensiteten förändras snabbt.
Att lära en fyrbent robot att lukta som en mal
Nästa steg byggde forskarna en fyrbent robot med doftkänsliga enheter på sitt ”huvud”, ordnade för att efterlikna antennens bas-till-spets-struktur. De skapade två sökalgoritmer. Den första, en standard malinspirerad metod kallad SZL (för surge–zigzag–loop), förutsätter två fungerande doftsensorer och väljer sin raka ”surge”-riktning från den relativa tidpunkten för vänster- och högermätningarna. Den andra, kallad kontextberoende malinspirerad (CDMI), inbäddar de nya mallreglerna: den skattar var längs den kvarvarande sensorn en doft detekterades och använder sannolikhetskurvorna härledda från djurförsöken för att avgöra åt vilket håll den ska röra sig och hur skarpt den ska svänga. Vid inomhustester fungerade SZL bäst när båda sensorerna var intakta och gav snabba, relativt raka banor. Men när en sensor var inaktiverad presterade CDMI klart bättre än SZL och hittade källan oftare genom att följa doftfältets föränderliga kant i loopande banor liknande dem hos de enantennade malarna.
Robotar som förblir intelligenta när saker går sönder
För att driva idén längre testade teamet sina robotar utomhus, där naturlig vind och turbulens gör doftplumer mycket fläckiga. De gav den intakta roboten den konventionella SZL-algoritmen och den ”ensensoriga” roboten CDMI-algoritmen. Båda uppnådde jämförbara framgångsfrekvenser, men den skadade roboten som använde den malinspirerade adaptiva strategin fann ofta källan med kortare, mindre snirkliga banor. Detta antyder att det i tuffa, verkliga förhållanden faktiskt kan vara bättre att byta från ett precist men skört sensorschema till en mer utforskande, kantföljande strategi. Det bredare budskapet är att robust navigation inte kräver alltmer komplex artificiell intelligens. I stället kan enkla, biologiskt grundade regler — kopplade till hur sensorer är placerade på kroppen och hur kroppen interagerar med miljön — hjälpa skapa robotar som fortsätter fungera även när viktiga delar fallerar, en avgörande egenskap för långvariga utforsknings- och räddningsuppdrag.
Citering: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Nyckelord: olfaktorisk navigation, bioinspirerad robotik, lokalisering av doftkälla, insektinspirerad AI, förkroppsligad intelligens