Clear Sky Science · sv
Taktilt reaktivt gripdon med en aktiv handflata för skicklig manipulation
Robotar som kan känna vad de håller
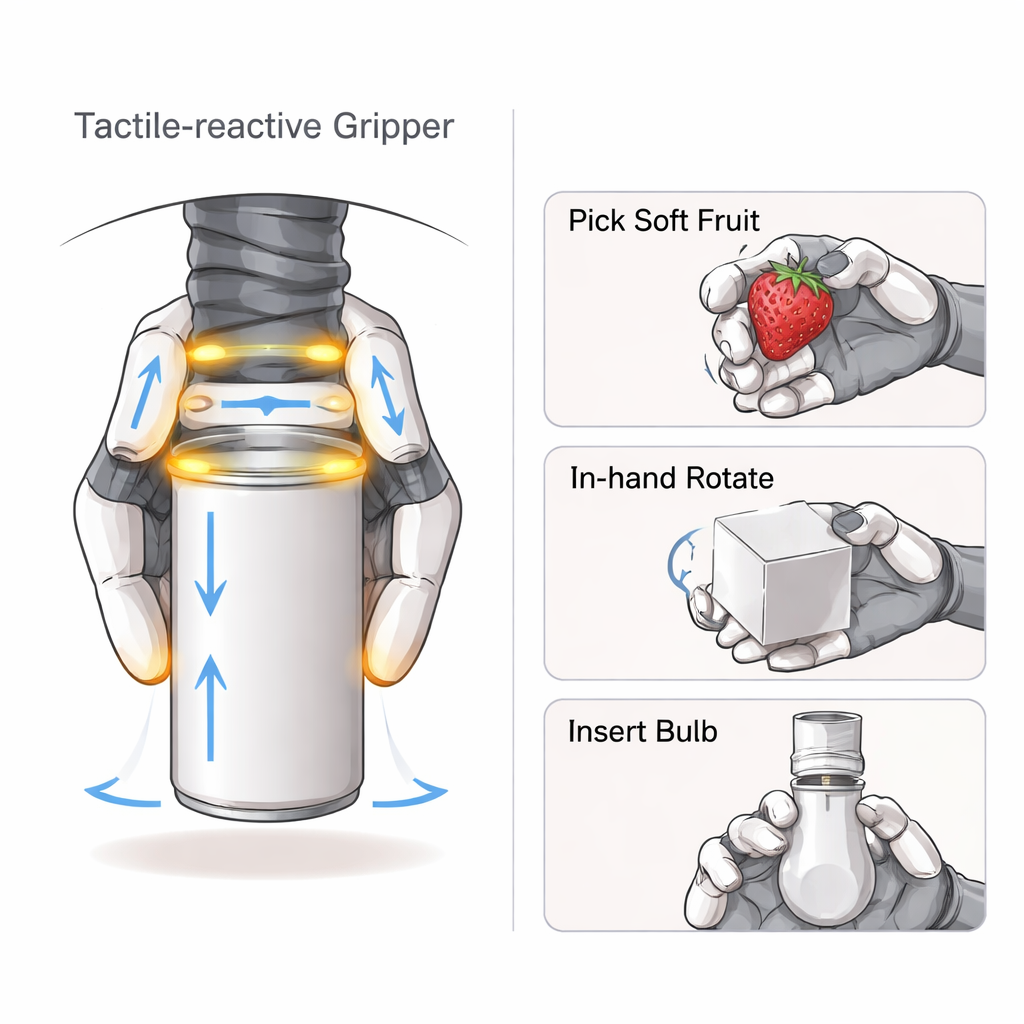
Föreställ dig en robot som varsamt kan plocka en mogen jordgubbe, vrida upp en barnsäker flaska eller skruva i en glödlampa ovanför huvudet—allting utan att krossa, tappa eller felinriktat något. Denna artikel beskriver ett nytt robotgripdon som för maskiner närmare den typen av försiktig, människoliknande handskicklighet genom att ge roboten inte bara intelligenta fingrar utan också en aktiv, mycket känslig handflata.
En handflata som gör mer än att bara hålla
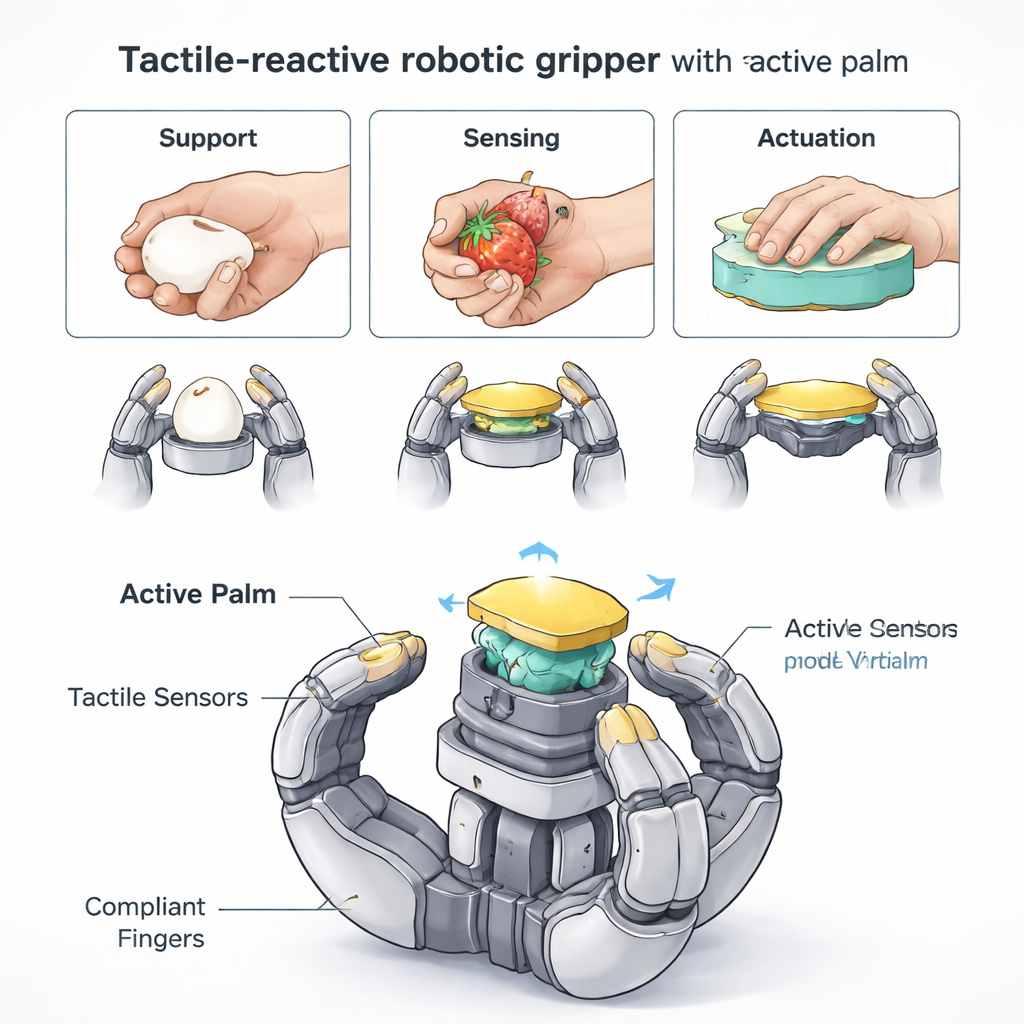
De flesta robothänder idag har antingen enkla, styva klor som bara kan gripa, eller mycket komplexa flerfingerhänder som är svåra att bygga och kontrollera. En viktig insikt i detta arbete är att människohänder i hög grad förlitar sig på handflatan—inte bara fingrarna—for stöd, känsel och pressande rörelser. Forskarna designade ett trefingers robotgripdon med en central handflata som kan röra sig upp och ner och som är täckt av en kamerabaserad touchsensor. Varje fingertopp har dessutom en egen flexibel trycksensorplatta. Tillsammans låter dessa delar gripdonet känna var och hur det berör ett föremål och justera greppet i realtid, trots att hela systemet bara använder sju rörliga leder.
Enkla rörelser, många greppmöjligheter
Gripdonets tre identiska fingrar kan svepa runt och böjas, vilket möjliggör flera vardagliga greppstilar: fånga stora föremål som bollar, nypa tunna objekt som kort, och klämma tunga verktyg i ett kraftgrepp. Den mjuka, ryggradsliknande fingerkonstruktionen omsluter naturligt föremål i olika former utan detaljerad programmering. Under tiden glider handflatan vertikalt som en hiss, så att den kan trycka mot ett föremål, dela lasten med fingrarna eller förflytta objektets position i handen. Simuleringar och experiment visar att även med bara två leder per finger plus den rörliga handflatan kan handen förflytta föremål i många riktningar och undvika klumpiga, svårstyrda lägen.
Känsel med både fingrar och handflata
För att förstå vad den håller kombinerar gripdonet tre typer av sensorer: detaljerade touch-bilder från handflatan, tryckkartor från fingertopparna och mätningar av sina egna ledvinklar. Ett maskininlärningssystem fuserar dessa signaler och ger större vikt åt de signaler som är mest hjälpsamma för det aktuella föremålet. I tester med dryckesburkar och bollar i olika storlekar och material kunde systemet känna igen vad det höll med nästan 99 % noggrannhet. Denna rika känsel guidar också hur hårt det ska klämma, när det ska sluta stänga fingrarna och hur handflatan ska flyttas för att bibehålla stabil kontakt utan att skapa för mycket friktion.
Från testföremål till frukt och glödlampor
Teamet utsatte gripdonet för ett välanvänt benchmark för robotgrepp med vardagsföremål som bollar, verktyg och små hårdvarudelar. Det fick högre poäng än flera välkända forskningsgripdon samtidigt som det använde färre rörliga delar. Utöver testseten visade gripdonet att det kunde plocka ömtåliga frukter—jordgubbar, druvor, tomater med mera—utan synliga blåmärken även dagar senare, bekräftat under ultraviolett ljus. Det kunde också översätta och rotera klossar och cylindrar precist i handen, skruva i en glödlampa i en uppåtriktad sockel, trycka en sprutkolv medan det höll pipan, och öppna barnsäkra lock genom att trycka och vrida. I många av dessa uppgifter gav den rörliga handflatan det extra tryck, stöd eller den sensorik som standardgreppdon med bara fingrar saknar.
Varför detta är viktigt för framtidens robotar
Arbetet visar att robotar inte alltid behöver fler och fler fingrar eller leder för att vara skickliga. Genom att noggrant samordna några eftergivliga fingrar med en aktivt kontrollerad, touch-känslig handflata uppnår detta gripdon en blandning av styrka, ömtålighet och medvetenhet som börjar likna en människohand. Eftersom delarna till största delen är 3D-utskrivna och använder kommersiellt tillgängliga sensorer är designen relativt enkel att återskapa. Med vidare utveckling av lärandebaserad kontroll skulle liknande gripdon kunna hjälpa robotar att hantera dagligvaror, assistera i hemtjänst eller arbeta säkert tillsammans med människor i fabriker—med självförtroende i att känna vad de gör snarare än att bara gissa.
Citering: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Nyckelord: robotgripdon, taktil sensorik, skicklig manipulation, robothand, aktiv handflata