Clear Sky Science · sv
Att utnyttja proprioception i mjuka vattenvingar möjliggör hybrid passiv-aktiv störningsdämpning
Smarta vingar under vatten
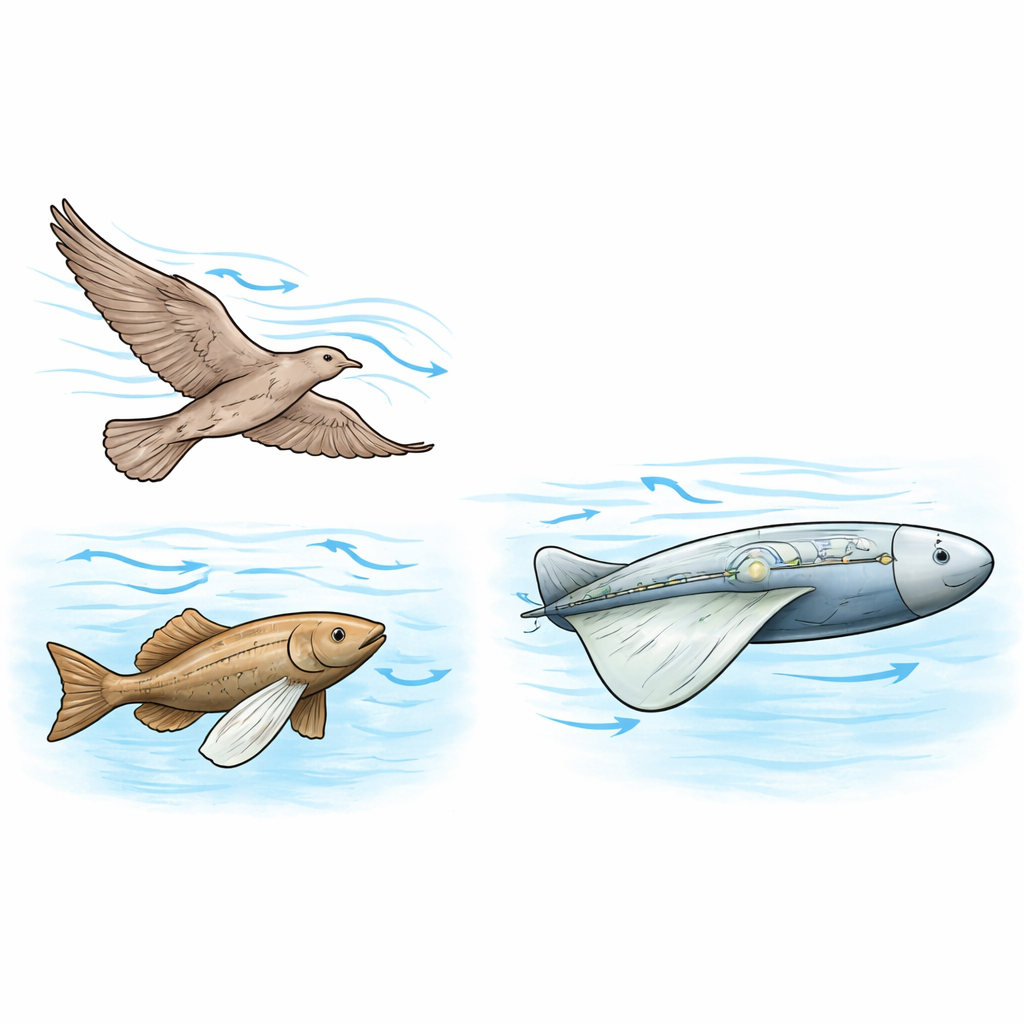
Den som sett en fågel sväva i byig vind eller en fisk hålla position i en strid ström har sett naturen lösa ett svårt ingenjörsproblem: hur man håller kurs när omkringliggande vätska vägrar uppföra sig. Denna studie visar hur en ny typ av mjuk undervattensvinge, utrustad med en slags “självkännedom” liknande djurens proprioception, automatiskt kan känna plötsliga förändringar i flödet och omforma sig för att förbli stabil. Arbetet pekar mot framtida undervattensrobotar som glider mer som djur och mindre som styva maskiner, sparar energi samtidigt som de hanterar grov sjö.
Lärdomar från fåglar och fiskar
I naturen är vingar och fenor inte stela blad; de böjer, vrider sig och flexar. Fåglar känner luftens rörelser genom små receptorer i fjädrarna, medan fiskar använder tryckkänsliga celler längs kroppen och i finnstråna. Dessa inbyggda sensorer låter djur känna hur deras utskott deformeras i rörlig vätska eller luft och reagera nästan omedelbart, vilket avvisar kast och turbulens. Däremot använder de flesta undervattensfarkoster styva styrytor och separata instrument för att mäta flöde, vilket gör dem tröga och energikrävande när miljön blir kaotisk. Författarna hävdar att en kombination av flexibilitet och sensning i en enda mjuk struktur kan minska denna klyfta.
En mjuk vinge med inbyggda sinnen
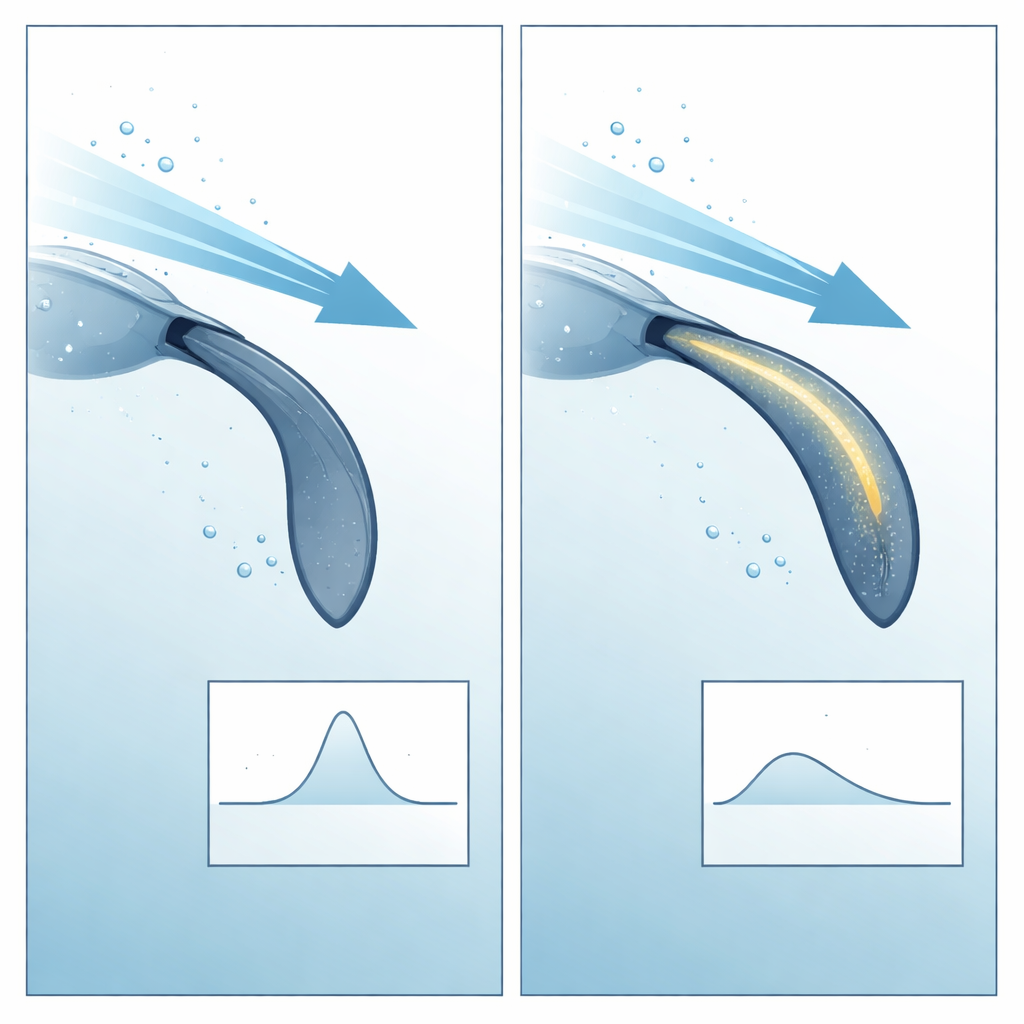
Teamet byggde en halvvinge för undervattensbruk som förenar en mjuk, böjlig bakdel med en styv nos. Inuti den mjuka sektionen löper uppblåsbara rör fyllda med vätska, vilka kan trycksättas för att ändra vingens kurvatur eller camber. På utsidan limmade de en tunn elektronisk “hud” av silikon med flytande metalltrådar. När vingen böjs förändras avståndet mellan dessa inkapslade ledare, vilket ändrar deras elektriska kapacitans. Genom att träna en enkel maskininlärningsmodell att matcha dessa signaler med kameraspårade former förvandlade forskarna e-huden till en mycket noggrann formgivningssensor. När modellen är tränad kan systemet uppskatta vingens camber i realtid utan externa kameror, även under vatten.
Att omvandla form till kontroll
Med denna proprioceptiva mjuka vinge monterad i en vattentunnel imiterade forskarna kast som plötsliga förändringar i vingens vinkel mot flödet. Först visade de, under stabila förhållanden, att genom att justera cambern kunde de producera samma lyft vid olika flödesvinklar, eller olika lyft vid samma vinkel. Det innebär att när ett kast försöker rubba vingen finns en ”stig” i formsrummet som kan återställa önskat lyft. De programmerade sedan en idealiserad öppenkretsrespons—med exakt kännedom om när kastet skulle inträffa—för att pumpa upp eller släppa ur de interna rören vid rätt tillfällen. I detta bästa fall minskade camberändringen lyftfallet under en störning från cirka 50% ner till ungefär 10%.
Låt vingen reagera själv
Det mer krävande testet var att låta vingen själv avgöra när något var fel. Här känner e-huden igen en karakteristisk ”signatur” i cambersignalen: en snabb översvängning och oscillation när den mjuka kroppen flexar under en plötslig flödesförändring. När detta mönster uppträder pumpas rören upp av en enkel regulator i den riktning som mest sannolikt återför lyftet mot dess mål, utan att explicit beräkna flöde eller krafter. Även denna minimalistiska strategi fungerar väl. Jämfört med en motsvarande styv vinge minskar den oaktiverade mjuka vingen ensam gustimpulsen—i praktiken det sammanlagda knuffet över tid—med ungefär en faktor tre. När aktiv styrning läggs till reduceras den totala oönskade lyftimpulsen med upp till 87%, närmande sig och till och med överträffande den gusthanteringsförmåga som rapporterats för vissa fåglar, om än i ett annat medium.
Varför detta betyder något för framtidens robotar
För en icke-specialist är huvudslutsatsen att göra undervattensrobotar mjukare och mer självmedvetna kan göra dem både tuffare och mer effektiva. Istället för att bekämpa störningar med råstyrka från motorer och komplexa externa sensorer hjälper robotens egen flexibla kropp och inbäddade hud till att absorbera och läsa flödet, vilket utlöser måttliga formförändringar som håller kursen. Medan denna studie fokuserar på en enskild experimentell vinge i en kontrollerad tank kan samma principer tillämpas på fullständiga farkoster eller fiskliknande simrobotar. På sikt kan sådan ”förkroppsligad intelligens” låta maskiner utforska turbulenta hav med samma tysta grace som fåglar och fiskar redan uppvisar i luft och vatten.
Citering: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Nyckelord: mjukrobotik, ubåtsfarkoster, bionisk design, avvisning av strömningsstörningar, proprioceptiv sensning