Clear Sky Science · sv
Förkroppsligad taktil uppfattning av mjuka objekts egenskaper
Varför det är viktigt att lära robotar att känna
Föreställ dig en robot som varsamt undersöker en patients buk, sorterar mogen frukt utan att få den att bli blåmärken eller monterar ömtåliga delar med enbart beröring. För att göra något av detta säkert måste robotar lära sig att "känna" mjuka objekt på ett rikt, människoliknande sätt. Den här artikeln beskriver hur forskare byggde en elektronisk hud och en ny sorts inlärningsmodell så att robotar bättre kan uppfatta mjukhet, form och yta på mjuka objekt — och därigenom ta ett steg närmare verkligt skicklig taktil förmåga.
Att bygga en högteknologisk känselsinne
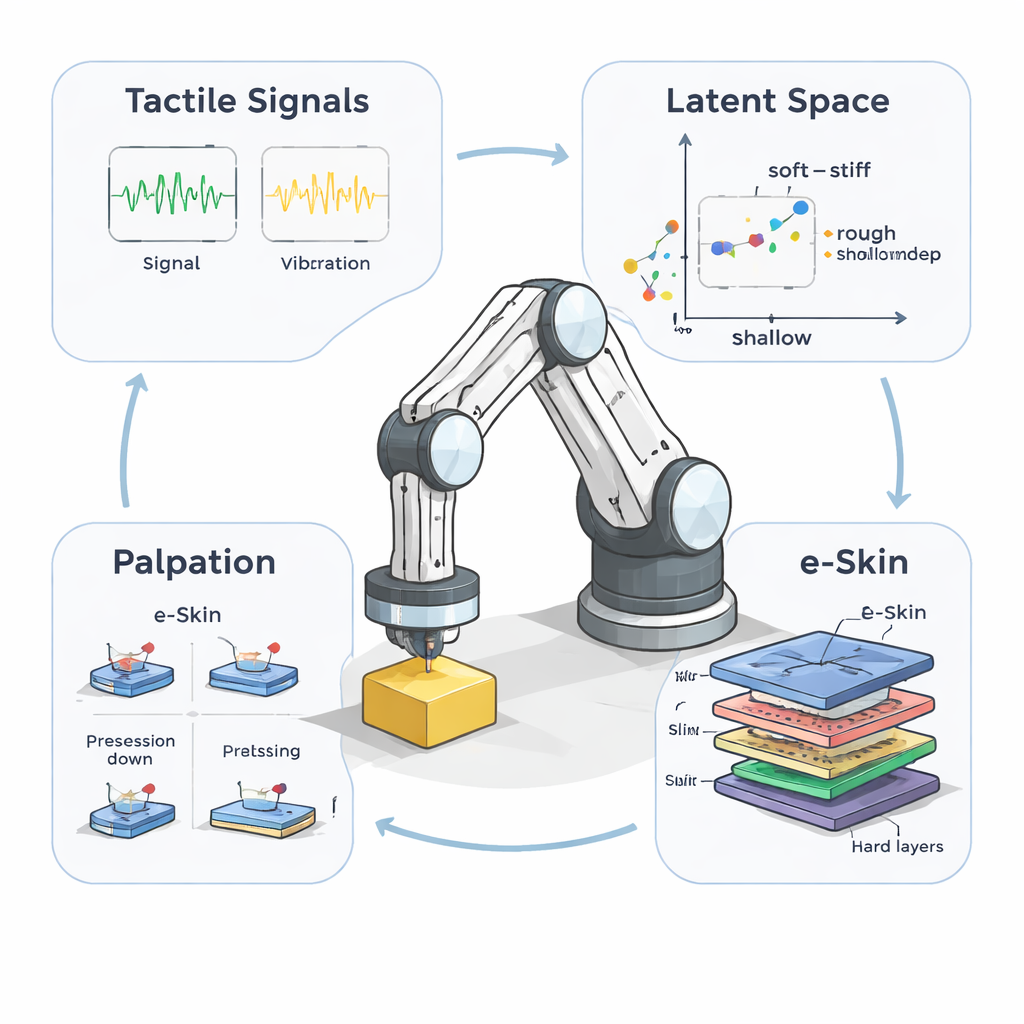
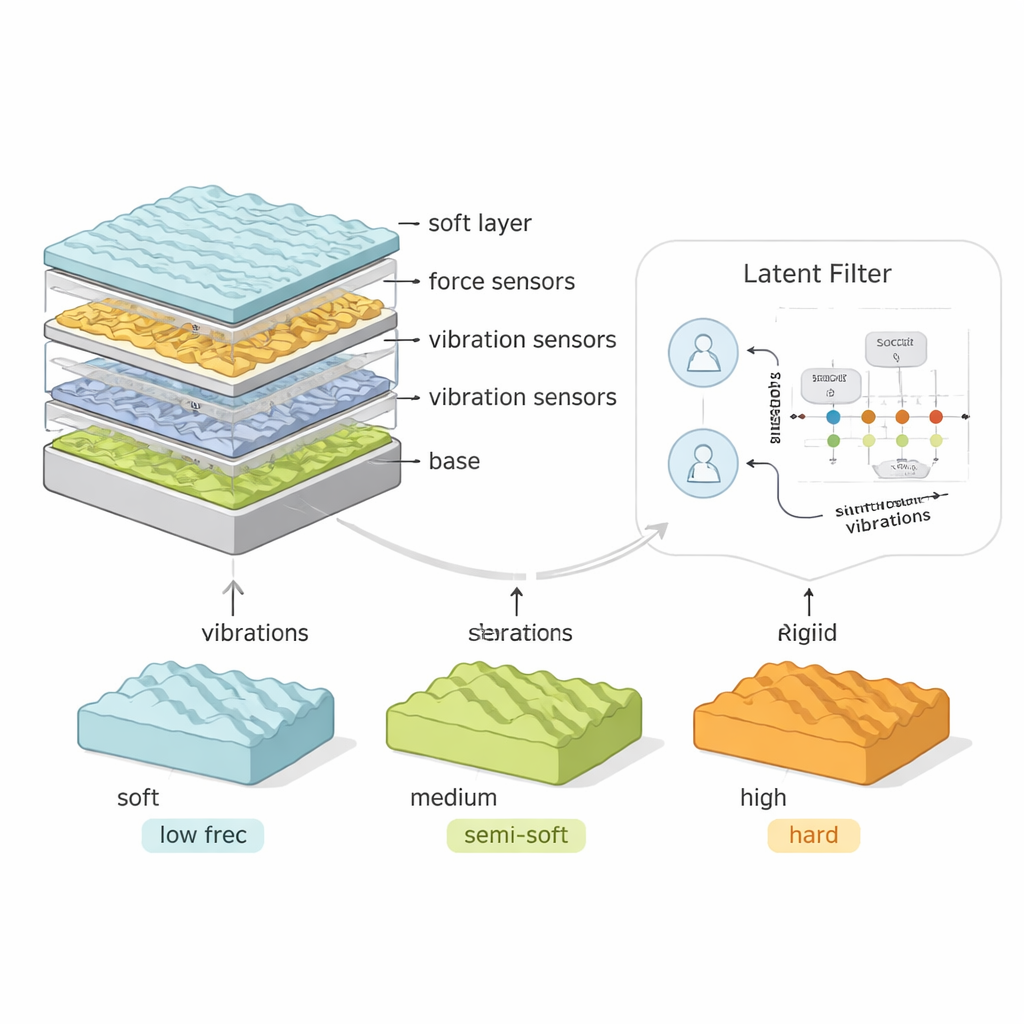
Människohud är mjuk, lager på lager och full av olika beröringsreceptorer som reagerar på tryck, töjning och vibrationer. Teamet gav sig i kast med att efterlikna dessa förmågor i en robot. De skapade en modulär elektronisk hud, eller e‑Skin, uppbyggd av staplade silikonskikt med inbäddade sensorer. Två lager innehåller täta matriser av kraftsensorer som mäter hur mycket huden trycks in på olika ställen, medan ett tredje lager rymmer små accelerometrar som plockar upp snabba vibrationer, som det surr du känner när du drar ett finger över ett grovt tyg. Genom att byta typ av silikon kunde de göra e‑Skinen mjukare eller styvare, och genom att slå av eller på sensorlager kunde de testa olika kombinationer av "sinnessystem."
Att skapa en värld av mjuka saker
För att studera beröring på ett kontrollerat sätt behövde forskarna mer än enkla gummiblock. De skapade ett bibliotek av "vågobjekt" med noggrant stämda egenskaper. Varje objekt hade en vågig ovansida vars bulor kunde vara grunda eller höga (amplitud) och ligga nära varandra eller längre isär (rumslig frekvens), och varje var gjuten i material som sträckte sig från mycket mjuk silikon till styv plast. Vissa prov innehöll också ett tunt styvt lager under en mjuk yta, vilket efterliknar vävnader eller material som förändras när du trycker djupare. Detta gjorde att teamet kände till den exakta mjukheten och texturen hos varje objekt roboten rörde vid, så att de kunde jämföra vad roboten "kände" med verkliga mätvärden.
Att lära robotarna utforska med beröring
Precis som människor petar, trycker och skjuter sina fingrar på olika sätt för att bedöma ett föremål, använde roboten tre grundläggande palpationsrörelser. Vid pressning rörde den sig rakt upp och ner för att utforska den övergripande mjukheten. Vid precession lutade och rullade den e‑Skinen och kom i kontakt med flera närliggande områden för att undersöka mer komplexa former. Vid glidning förflyttade den sig sidledes över ytan för att framhäva fina texturer och friktion. För varje objekt utförde roboten dessa rörelser med varierande djup och hastigheter och genererade tusentals tidsvarierande beröringssignaler — krafter som förändras över huden och vibrationer som sprider sig genom den. Dessa rika, dynamiska dataströmmar är långt mer informativa än ett enda statiskt stick.
Att upptäcka dolda mönster i beröring
För att göra meningsfullt av denna informationsmängd introducerade författarna en maskininlärningsmodell de kallar Latent Filter. Istället för att försöka märka objekt direkt lär sig modellen en intern "karta" där varje punkt sammanfattar robotens pågående interaktion med ett objekt. Detta latenta utrymme är strukturerat så att vissa komponenter svarar snabbt på omedelbara beröringssignaler, medan andra integrerar information långsamt över tid. Genom att träna Latent Filter på många interaktioner visade teamet att denna interna karta naturligt stämmer överens med meningsfulla fysiska egenskaper som ytråhet, bulhöjd och styvhet — trots att modellen aldrig uttryckligen fått dessa etiketter. Ett separat regressionssteg bekräftade att dessa dolda funktioner kunde förutsäga ett objekts verkliga mekaniska egenskaper med god noggrannhet.
Hur hud, sinnen och rörelse samverkar
Experimenten visade att inget enskilt sensorlager eller rörelsestrategi är bäst i alla situationer. Att kombinera vibrations- och kraftinformation genom ett "sen fusion"-sätt — där varje signaltyp bearbetas separat innan de slås ihop — gav den mest tillförlitliga förståelsen av mjuka objekt. Två kraftlager hjälpte systemet att uppfatta skjuvning och töjning, vilket är viktigt för att upptäcka styvhet och dold intern struktur, medan vibrationer var särskilt användbara för att känna fina texturer vid glidning. E‑Skinens mekaniska mjukhet spelade också roll: styvare hudar var bättre för att mäta övergripande styvhet och form, medan mjukare hudar utmärkte sig vid att avkänna subtila variationer i eftergivliga eller lager-på-lager-material. Resultaten antyder att robotberöring bör utformas tillsammans: hudens egenskaper, sensorelektroniken och sättet roboten rör sig måste finjusteras i samspel.
Vad detta betyder för vardagsrobotar
Genom att förena en lager-på-lager, människoinspirerad e‑Skin med en kraftfull inlärningsmodell som respekterar handlingens roll visar detta arbete hur robotar kan bygga en djupare känsla för beröring. Istället för att enbart förlita sig på kameror eller enkla krafttrösklar skulle framtida maskiner kunna känna hur ett föremål ger efter, vibrerar och förändras när de utforskar det — och sedan justera sitt grepp eller rörelse i realtid. Sådana förmågor är avgörande för tillämpningar som medicinsk palpation, hantering av mjuka livsmedel och manipulation av formbara föremål i hem och fabriker. Enkelt uttryckt visar studien att för att röra världen lika effektivt som vi gör behöver robotar inte bara bra sensorer, utan också rätt "kropp" och rätt rörelsevanor — och ett smart sätt att väva ihop all denna information till en sammanhängande förståelse av vad de känner.
Citering: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Nyckelord: robotiskt beröring, elektronisk hud, avkänning av mjuka föremål, taktil perception, förkroppsligad robotik