Clear Sky Science · sv
GenHand: generaliserad kinematisk omkoppling av mänskligt grepp
Lära robotar att hålla saker som vi gör
Från att plocka upp en kaffemugg till att vrida en skruvmejsel får våra händer hantering av föremål att se enkel ut. Robotar har däremot ofta svårt att greppa vardagsföremål på ett tillförlitligt sätt, särskilt när deras gripdon inte liknar en människohand. Denna artikel presenterar GenHand, ett system som lär sig från mänskliga handrörelser i vanliga bilder och omvandlar dem till stabila, människoliknande grepp för många olika typer av robothänder.
Varför robothänder behöver mer än kopierade rörelser
Många nuvarande system för teleoperation och imitationsträning försöker att direkt kopiera en människohands pose till en robothand. De matchar fingertoppspositioner och ledvinklar så nära som möjligt. Det fungerar bara när robothanden liknar en människohand och har ett liknande antal fingrar och leder. Så snart robotens gripdon är enklare—till exempel bara två platta fingrar—kan den kopierade posen sluta ge ett säkert grepp. Dessa tillvägagångssätt bortser dessutom till stor del från föremålets form och var fast kontakt bör uppstå, så de resulterande greppen kan glida, tappa balans eller aldrig riktigt röra ytan korrekt.
Att betrakta händer och föremål tillsammans
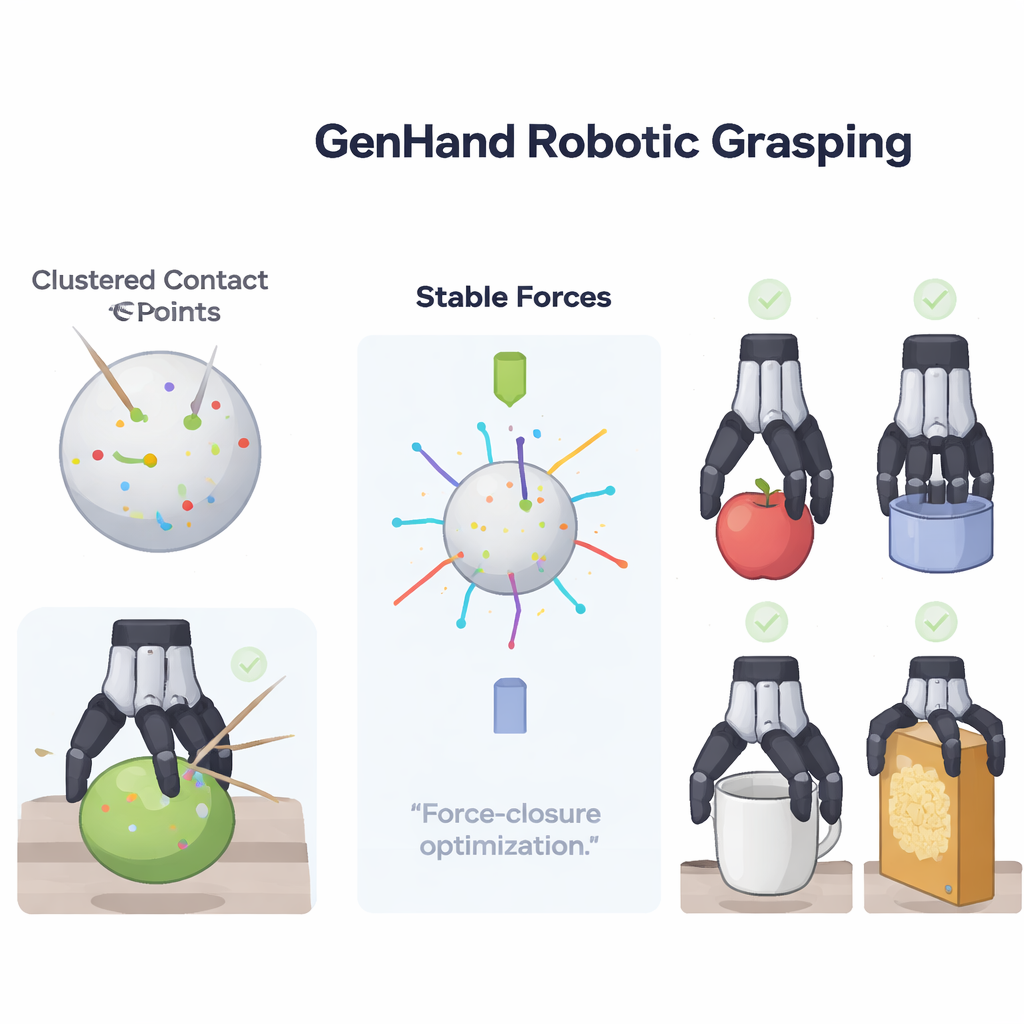
GenHand tar sig an detta problem genom att fokusera på interaktionen mellan handen och föremålet, inte bara handens form. Utifrån en vanlig RGB-bild rekonstruerar systemet en detaljerad 3D-modell av föremålet och en parametrisk 3D-modell av den mänskliga handen. Det använder ett neuralt nätverk för att sluta sig till handens pose och en avancerad "signed distance"-representation för att återfå föremålets yta. Utifrån detta modellpar avgör GenHand var människans fingertoppar faktiskt tar kontakt och i vilka riktningar de trycker på föremålet. Därefter klustrar det dessa kontaktpunkter till ett litet antal meningsfulla regioner och kraftriktningar som sammanfattar den väsentliga strukturen i det mänskliga greppet samtidigt som onödiga detaljer filtreras bort.
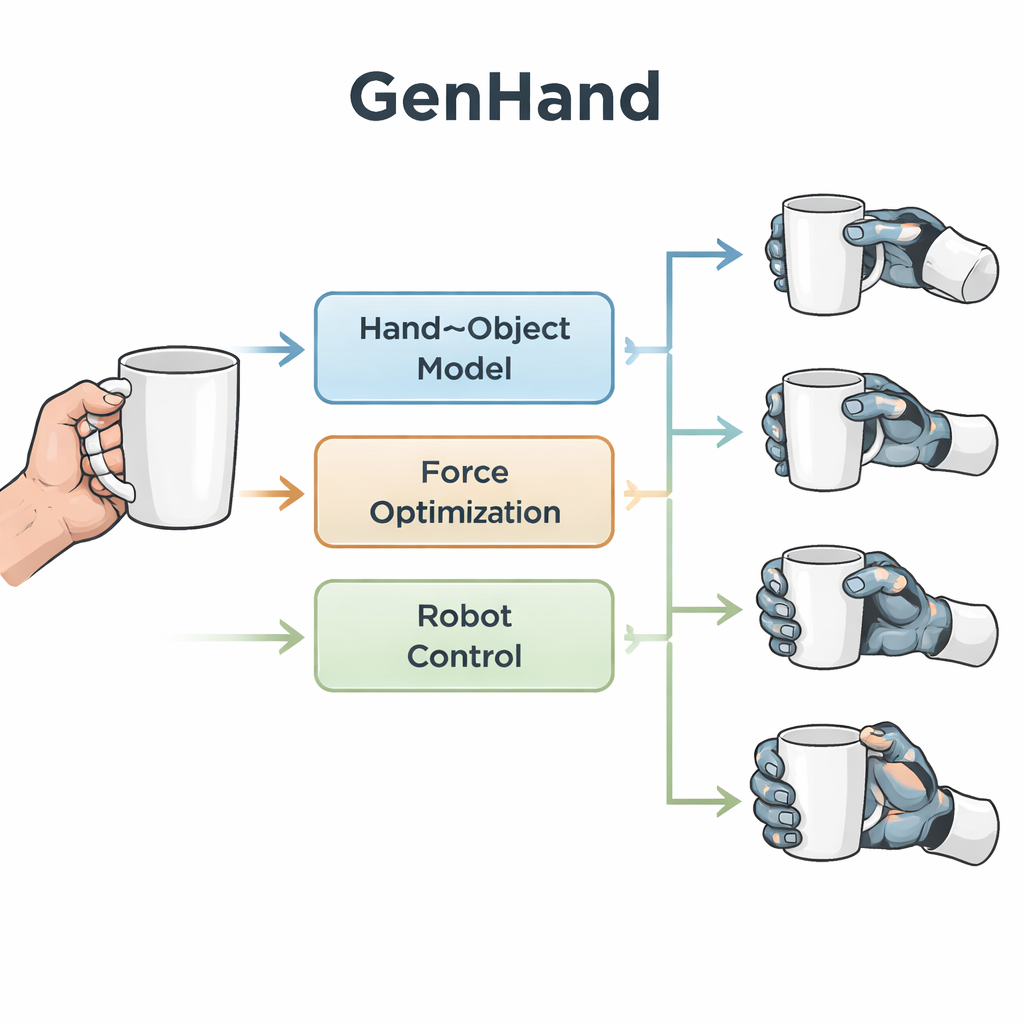
Återuppfinna greppet för varje robot
När GenHand förstår de viktigaste kontaktområdena och hur de stöder föremålet bygger det upp en ny uppsättning "kontaktankare" som passar det specifika robotgripdonet. För ett enkelt tvåfingersgripdon kan det behålla endast två motsatta kontaktregioner, som ett par tummar som klämmer åt ett paket. För mer duktiga händer med tre, fyra eller fem fingrar kan det tilldela ytterligare ankare för att bättre matcha det rika kontaktmönstret i det mänskliga greppet. Ett matematiskt optimeringssteg söker sedan efter kontaktpunkter på föremålets yta som kan balansera krafter och vridmoment i alla riktningar, en egenskap känd som kraftslutning (force closure). Avgörande är att GenHand håller sig nära de ursprungliga mänskliga kontakterna samtidigt som det kräver att det resulterande greppet är fysiskt stabilt i verkligheten.
Från stabila kontakter till verkliga robotrörelser
Med stabila kontaktankare på plats hittar ett andra optimeringssteg faktiska ledvinklar och handledsrörelser för roboten som kan realisera dessa ankare utan att överskrida ledgränser eller orsaka kollisioner med föremålet. För att göra detta matchar GenHand upprepade gånger robotens potentiella kontaktställen mot de önskade ankaren, justerar posen och kontrollerar om länkar tränger in i föremålet. Denna process tillämpas på en rad robothänder—from ett enkelt Robotiq-tvåfingersgripdon upp till en mycket artikulerad femfingers Shadow-hand—och testas i fysiksimulering. Jämfört med en ledande baseline som bara efterliknar fingertoppsgeometri ger GenHand mycket lägre obalans i krafter, mer exakt ytcontact och avsevärt högre framgångsfrekvenser vid lyft och hållning av 20 vardagsföremål under olika friktionsförhållanden.
Vad detta kan innebära för vardagsrobotar
För en lekmans läsare är slutsatsen att GenHand ger robotar en bättre känsla för "hur" man håller saker, inte bara "var" man placerar sina fingrar. Genom att lära från verkliga mänskliga grepp och upprätthålla grundläggande regler för fysisk stabilitet kan det omvandla samma mänskliga demonstration till mycket olika robothänder samtidigt som solida, pålitliga grepp uppnås. Detta gör teleopererade robotar enklare att styra, hjälper inlärningssystem att träna på rikare exempel och för oss närmare hemoch arbetsplatsrobotar som säkert kan manipulera samma stora variation av föremål som människor gör.
Citering: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Nyckelord: robotiskt grepp, teleoperation, mänsklig demonstration, robothänder, manipulation