Clear Sky Science · sv
Prisvärd 3D‑utskriven miniatyrrobotgripare med integrerad kamera för synbaserad kraft‑ och momentmätning
Varför små mjuka gripare spelar roll
Robotar blir mindre och tar sig an mer ömtåliga uppgifter, från att montera små kugghjul till att plocka mogna bär utan att krossa dem. Men de flesta robot‑händer klämmer fortfarande blint, med liten känsla för hur hårt de trycker. Denna artikel presenterar en lågkostnads, 3D‑utskriven minigripare, smeknamnet ”Seezer”, som både kan gripa ömtåliga föremål och ”känna” krafter med en liten kamera inne i fingertopparna istället för dyra kraftsensorer.
En försiktig hand som ser
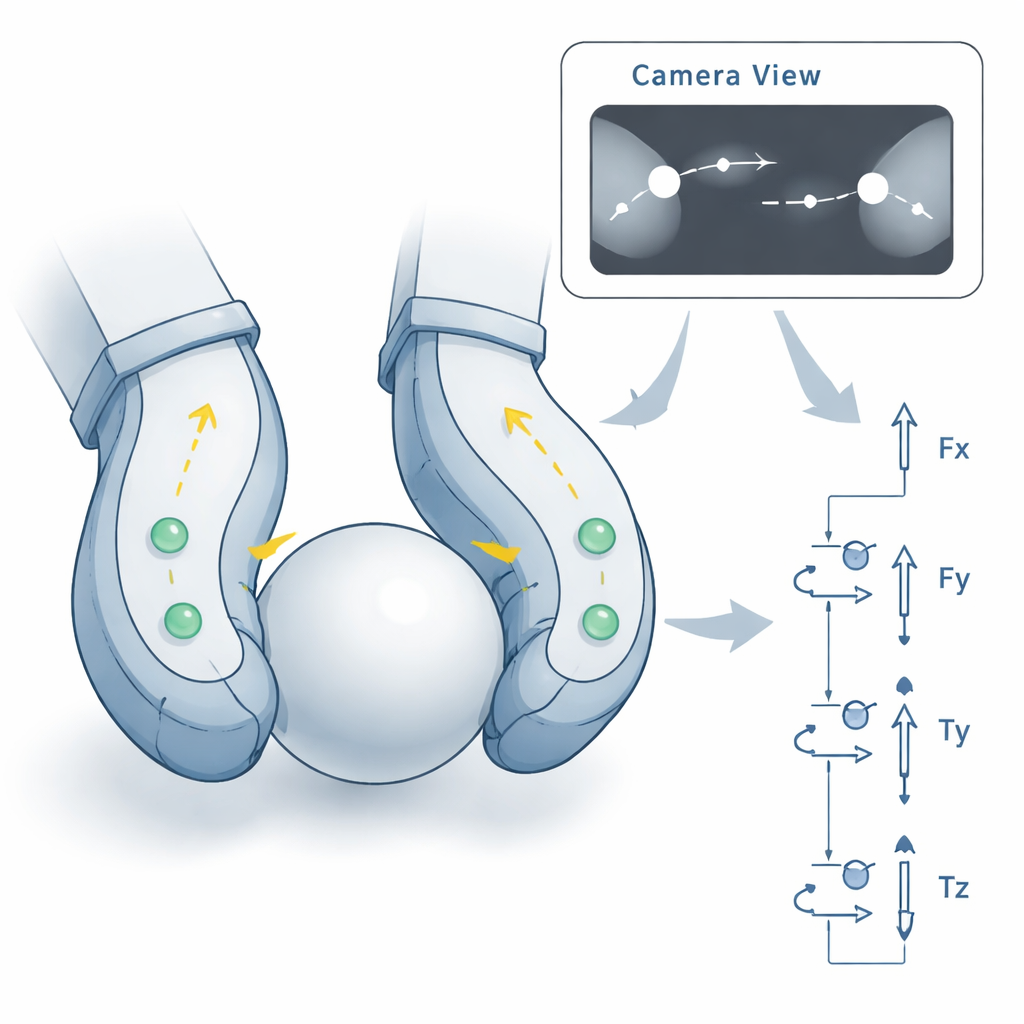
Seezer är en mjuk, eftergivlig robotgripare vars fingrar böjer sig istället för att vridas som metalltänger. Huvudidén är att bygga nästan allt i ett stycke på en konsumentinriktad 3D‑skrivare: en monolitisk fingerdel som inkluderar flexibla leder, fingertoppsformer anpassade för uppgiften och små inbyggda markörer. Denna förbrukningsfingermodul träs på en kompakt motorenhet som rymmer en miniatyrkamera och belysning. När motorn driver ett snäckväxelhjul böjer sig lederna och fingrarna sluter sig runt ett föremål, medan kameran bevakar fingertopparna och området framför griparen.

Läsa kraft från fingerböj
I stället för att inbädda kablar, töjningsgivare eller tryckkuddar i fingrarna målar Seezer insidan med informationsrika visuella tecken. Varje fingertopp bär små runda ”fiduciella” markörer vars positioner i kamerabilden förändras när fingret deformeras. Mjukvaran detekterar och följer först dessa markörer i varje bildruta. Sedan, baserat på en kort kalibreringssekvens, lär enkla matematiska modeller hur förskjutningar i markörpositioner relaterar till de faktiska tryck‑ och dragkrafterna på varje fingertopp. Genom att kombinera de tre fingertoppskrafterna med grundläggande fysik uppskattar systemet de totala krafterna och momenten på griparen i alla sex riktningar, samt klämkraften mellan fingrarna.
Hur väl den känner krafter
För att kontrollera hur noggrann denna kamerabaserade mätning är jämförde författarna Seezers uppskattningar med avläsningar från en högprecisions kommersiell kraft/moment‑sensor i en kontrollerad labbuppställning. Med en version av fingerdesignen (styvare toppar) mätte griparen klämkrafter upp till cirka 1,1 newton med typiska fel mellan 8 % och 17 %, och fulla sex‑axliga krafter och moment med fel mestadels mellan 8 % och 24 %. En mjukare fingertoppsversion bytte maximal kraft mot högre känslighet, vilket gav mindre maximala krafter men ändå jämförbara procentuella fel. Viktigt är att modellerna behövde endast 31 till 141 kalibreringsdatapunkter—betydligt färre än de tusentals bilder som ofta krävs av djupinlärningsmetoder som arbetar på hela kameraramar.
Från små kugghjul till mjuka bär
Två demonstrationsuppgifter visar vad denna gripare kan göra i verkliga miljöer. I den ena plockade Seezer upprepade gånger små 3D‑utskrivna kugghjul från axlar, förflyttade dem och satte tillbaka dem, och använde den interna kameran både för att rikta in kugghjulets nyckelspår mot axeln och för att övervaka fingerrörelser. Detta efterliknar fin industriell montering i trånga utrymmen. I en annan uppgift skördade griparen röda vinbär från sina stjälkar. Här övervakade systemet i realtid sin beräknade klämkraft och slutade stänga när en förinställd krafttröskel nåddes, så att bär plockades utan att krossas. Båda exemplen kördes på billig elektronik och visade att en enda design kunde hantera både hårda och mjuka föremål i storleksordningen några millimeter.
Utmaningar och framtida användningsområden
Seezer är fortfarande ett konceptbevis och har begränsningar. Markörspårningen fungerar bäst i stabila, välbelysta scener med okomplicerade bakgrunder; förändrat ljus, blanka ytor och komplexa rörelser kan orsaka spårningsfel. Kamerans måttliga bildfrekvens begränsar också hur snabbt systemet kan reagera för tajt kraftkontroll eller rik haptisk återkoppling. Fingermaterialen kan tröttas eller ändra beteende vid långvarig användning, och teamet har ännu inte systematiskt testat prestanda över längre tidsperioder. Författarna menar att mer robusta spårningsalgoritmer eller att kombinera hårdvaran med moderna djupinlärningsbaserade kraftestimatorer skulle kunna öka noggrannhet och tillförlitlighet, medan framsteg i 3D‑utskrift bör tillåta ytterligare miniaturisering och steriliserbara förbrukningsfingrar för kirurgisk eller laboratorieanvändning.
Vad detta betyder för vardagsrobotik
Enkelt uttryckt visar detta arbete att en liten, billig robot‑hand både kan se och känna genom att bevaka hur dess egna mjuka fingrar böjer sig. Med bara måttlig kalibreringsdata och standardkomponenter uppskattar Seezer hur hårt den klämmer och i vilken riktning kontaktkrafter och moment verkar, tillräckligt noggrant för skonsamma hanteringsuppgifter. Om robustheten förbättras kan samma metod hjälpa framtida robotar att hantera små, ömtåliga föremål—som medicintekniska produkter, elektronik, frukt eller till och med vävnad vid minimalt invasiv kirurgi—utan klumpiga sensorer eller komplex hårdvara, och därigenom föra känslig beröring till platser där utrymme och kostnad är begränsade.
Citering: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Nyckelord: mjuk robotgripare, synbaserad kraftmätning, 3D‑utskriven robotik, miniatyrmanipulation, haptisk återkoppling