Clear Sky Science · sv
Framsteg inom mjukrobotik: senaste utvecklingen inom dielektriska elastomer- och fluidaktuatorer
Mjukrobotar som rör sig mer som muskler
Föreställ dig en robot som säkert kan krama ett barn, pressa sig igenom rasmassor i en kollapsad byggnad eller varsamt massera ett sviktande hjärta. För att utföra sådana uppgifter måste maskiner böja och sträcka sig på samma sätt som levande vävnad, inte klampa som metall. Denna översikt förklarar hur en ny klass av ”mjuka” elektriska muskler—gjorda av gummiliknande fasta material och vätskor—närmar sig den visionen, och vilka utmaningar som återstår innan de lämnar laboratoriet och kommer in i vardagslivet.
Från stela motorer till mjuka elektriska muskler
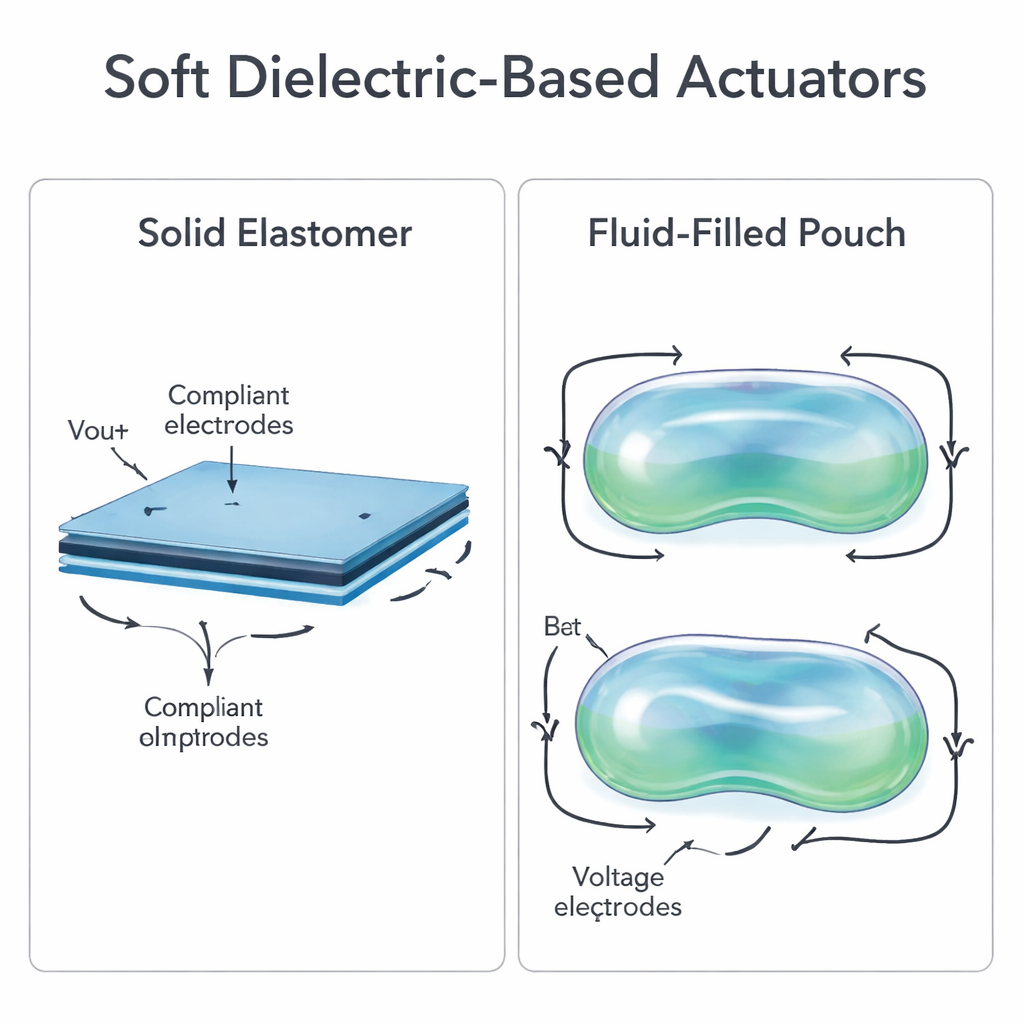
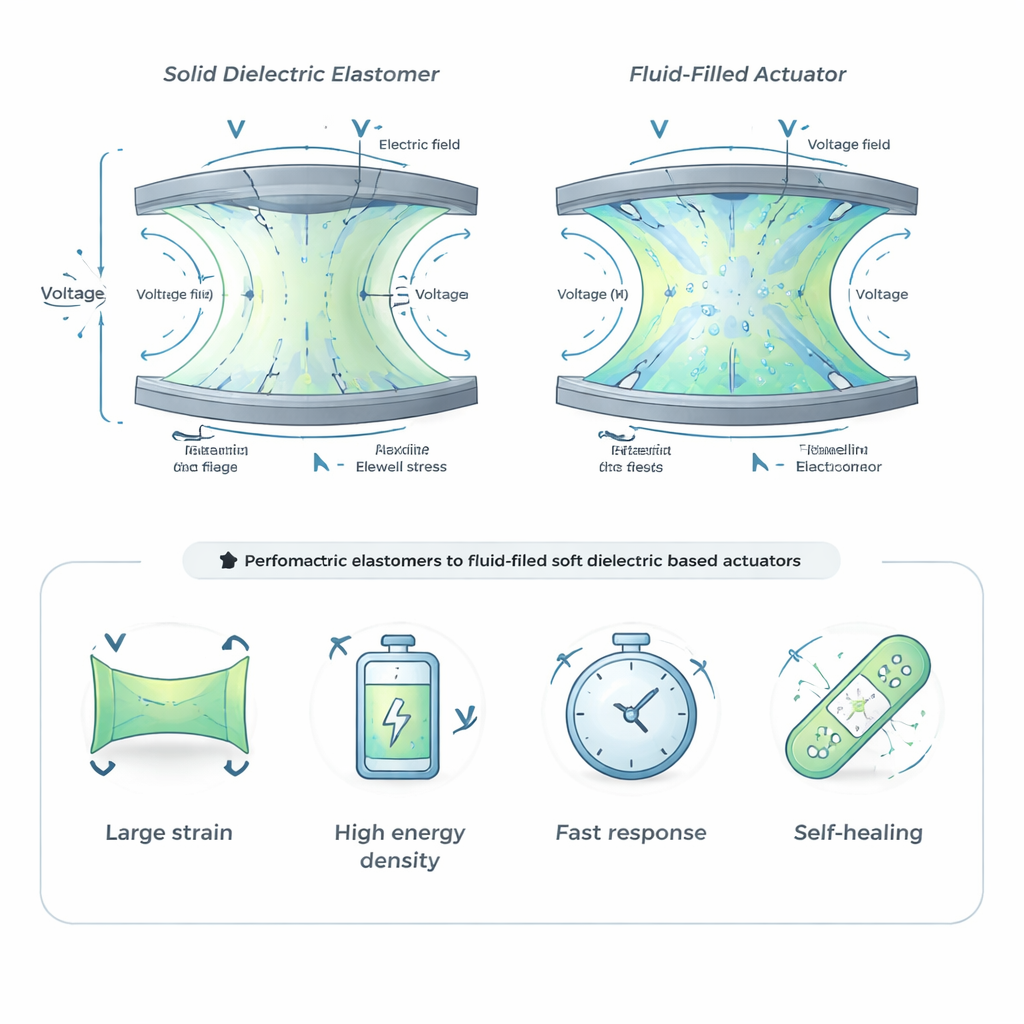
De flesta industrirobotar förlitar sig på tunga, styva motorer och växlar. De är kraftfulla och precisa, men också dyra, ömtåliga och potentiellt farliga nära människor. Mjukrobotar, byggda av töjbara material liknande silikonbakformar eller gummiband, byter ut råstyrka mot mjukhet, anpassningsförmåga och tålighet. Den här artikeln fokuserar på mjuka aktuatorer drivna av elektricitet: dielektriska elastomeraktuatorer (DEA), som använder ett lager av fast gummi, och dielektriska fluidaktuatorer (DFA), som använder en elektriskt isolerande vätska förseglad i en flexibel påse. I båda fallen trycker en spänning mellan två följsamma elektroder ihop materialet genom elektrostatisk kraft och omvandlar elektrisk energi direkt till rörelse med stora töjningar, hög energitäthet och snabb respons.
Hur materialen får musklerna att fungera
För att bete sig som användbara muskler behöver dessa enheter mycket specifika materialegenskaper. För DEAs måste den centrala gummiskivan vara extremt mjuk så att den kan töjas lätt, men också tåla höga elektriska fält utan att rivas eller kortslutas. Forskare balanserar detta med två huvudstrategier. Den ena är att designa nya polymerer—från akrylater, silikon och polyuretaner till mer exotiska blockkopolymerer—som packar många polära kemiska grupper (vilket ökar den elektriska responsen) i flexibla nätverk med låg styvhet. Den andra är att skapa kompositer genom att blanda in små partiklar eller vätskor som höjer materialets förmåga att lagra elektrisk energi. Liknande resonemang styr DFA-design: ingenjörer väljer oljor och andra dielektriska vätskor med rätt viskositet, stabilitet och kompatibilitet med tunna plast- eller silikonhöljen, så att spänning snabbt kan förflytta vätska för att skapa utbuktningar, slag och vibrationer utan läckage eller kemisk sönderfall.
Att bygga och driva mjuka aktuatorer i skala
Att förvandla dessa smarta material till pålitliga enheter är en egen ingenjörsutmaning. Traditionell tillverkning involverar ofta tidsödande manuella steg: att sträcka tunna filmer på ramar, måla eller trycka mjuka elektroder, stapla lager och—i fallet med DFAs—injicera vätska och försegla påsen. Artikeln granskar nyare tillverkningsmetoder som bläckstråle- och screentryck, extrudering av fiberliknande muskler och multimaterial 3D-utskrift som kan lägga ner elektroder och dielektrika i ett svep. Den förklarar också hur olika former ger olika rörelser: platta fläckar som expanderar i yta, kupoler som poppar upp, rullade cylindrar som drar ihop sig på längden och strukturer som böjer eller vibrerar. Eftersom dessa material kan åldras, läcka eller gå sönder genom elektrisk genombrott sammanfattar författarna livslängdsstudier och vanliga felmekanismer, och lyfter fram ansträngningar för självläkande konstruktioner som kan återhämta sig efter en gnista eller punktering.
Smartare styrning och nya tillämpningar
Liksom naturliga muskler måste mjuka aktuatorer styras. Enkla öppna loop‑scheman matar bara in ett spänningsmönster, men detta kan driva bort när materialet värms upp eller kryper. Mer avancerade tillvägagångssätt inbäddar sensorer—eller använder aktuatorns egna elektriska signaler—för att mäta töjning, kraft eller vibrationer i realtid och justera drivsignalen därefter. Forskare experimenterar nu med maskininlärnings- och förstärkningsinlärningsstyrningar som kan hantera den icke‑linjära, historikberoende beteendet hos mjuka material. På applikationssidan visar artikeln en bred palett: konstgjorda muskler som lyfter många gånger sin egen vikt, fisk‑ och insektliknande robotar som simmar eller flyger, bärbara haptiska band och fingertoppsplattor som ger realistisk taktil feedback, zoomobjektiv och ljusformande ytor inspirerade av bläckfiskar och människans öga, formförändrande ytor samt konceptmedicinska enheter som en dag skulle kunna hjälpa sviktande hjärtan eller förlamade ansikten.
Vad som fortfarande skiljer labbdemonstrationer från verkliga robotar
Trots löftet står dessa elektriska muskler fortfarande inför hinder innan de säkert kan driva hushållshjälpare, medicinska implantat eller massproducerade wearables. Många kräver kilovoltsnivåer i drivspänning, vilket komplicerar säkerhet och elektronik. Material som presterar utmärkt i korta tester kan stelna, torka ut eller gå sönder efter miljontals cykler. Tillverkningen är ofta för långsam och inkonsekvent för storskalig produktion. Och det förblir svårt att återvinna eller biologiskt bryta ner de flesta nuvarande polymerer. Författarna hävdar att framsteg kommer att bero på samskapande över skalor: nya mjuka material som kombinerar låg styvhet, hög elektrisk respons, robusthet och till och med självläkning; automatiserad, datadriven tillverkning och testning; och styrsystem som utnyttjar inbyggd sensning och lättvikts‑AI. Tillsammans kan dessa framsteg ge framtida robotar muskler som inte bara är starka och snabba, utan också säkra, anpassningsbara och hållbara.
Citering: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Nyckelord: mjukrobotik, dielektriska elastomeraktuatorer, dielektriska fluidaktuatorer, konstgjorda muskler, haptiska gränssnitt