Clear Sky Science · sv
Modellprediktiv spelstyrning för personligt och riktat interaktivt stöd
Robotar som känns som bra träningspartners
Föreställ dig en träningspartner eller sjukgymnast som alltid vet när den ska hjälpa dig lyfta, när den ska låta dig kämpa lite och hur snabbt du planerar att röra dig härnäst. Denna artikel visar hur man kan ge kontaktrobotar—som exoskelett som används i rehabilitering eller i fabriker—en liknande typ av intuition. Genom att matematiskt ”gissa” hur en person avser att röra sig under nästa sekund eller två kan roboten dela ansträngningen smidigt, minska trötthet och subtilt styra hur människor rör sig och lär sig.
Varför det är svårt att dela ansträngning med robotar
När en robot är fysiskt kopplad till en person—hjälper denne att flytta en lemm eller bära ett tungt föremål—trycker båda ständigt och reagerar på varandra. Traditionella robotstyrningar ignorerar till stor del vad människan planerar att göra; de jagar bara prestationsmål som noggrannhet eller energibesparing. Det kan göra att roboten blir antingen för stel och bossig eller för passiv och oduglig. Riktiga mänskliga partners klarar sig bättre: de känner av hur den andra rör sig, anpassar sig till dennes förmåga och uppmuntrar olika beteenden, från avslappning till intensiv ansträngning. Författarna hävdar att för att få robotar närmare denna typ av interaktion måste roboten uttryckligen modellera hur människan planerar rörelser och hur mycket ansträngning hen är villig att investera.
En spelteoretisk syn på människa–robot-interaktion
Forskarna bygger vidare på spelteori—matematiken för strategisk interaktion—för att betrakta människan och roboten som två ”spelare” som delar samma uppgift. Var och en har sina egna mål: människan vill följa önskad rörelse samtidigt som hen spenderar så lite ansträngning som möjligt, och roboten vill hjälpa till att följa rörelsen samtidigt som den minskar personens ansträngning. Avgörande är att båda antas se bara en kort stund framåt, över ett ändligt planeringsfönster på ungefär en till två sekunder, vilket speglar hur människor naturligt planerar rörelser. Inom detta fönster härleder teamet en kompakt formel för ett Nashjämvikt: ett balanserat kraftmönster där varken människan eller roboten kan förbättra sitt utfall utan att den andre förändrar sitt. Denna jämvikt definierar hur mycket var och en bör trycka i varje ögonblick.
Att lära roboten att läsa mänsklig avsikt
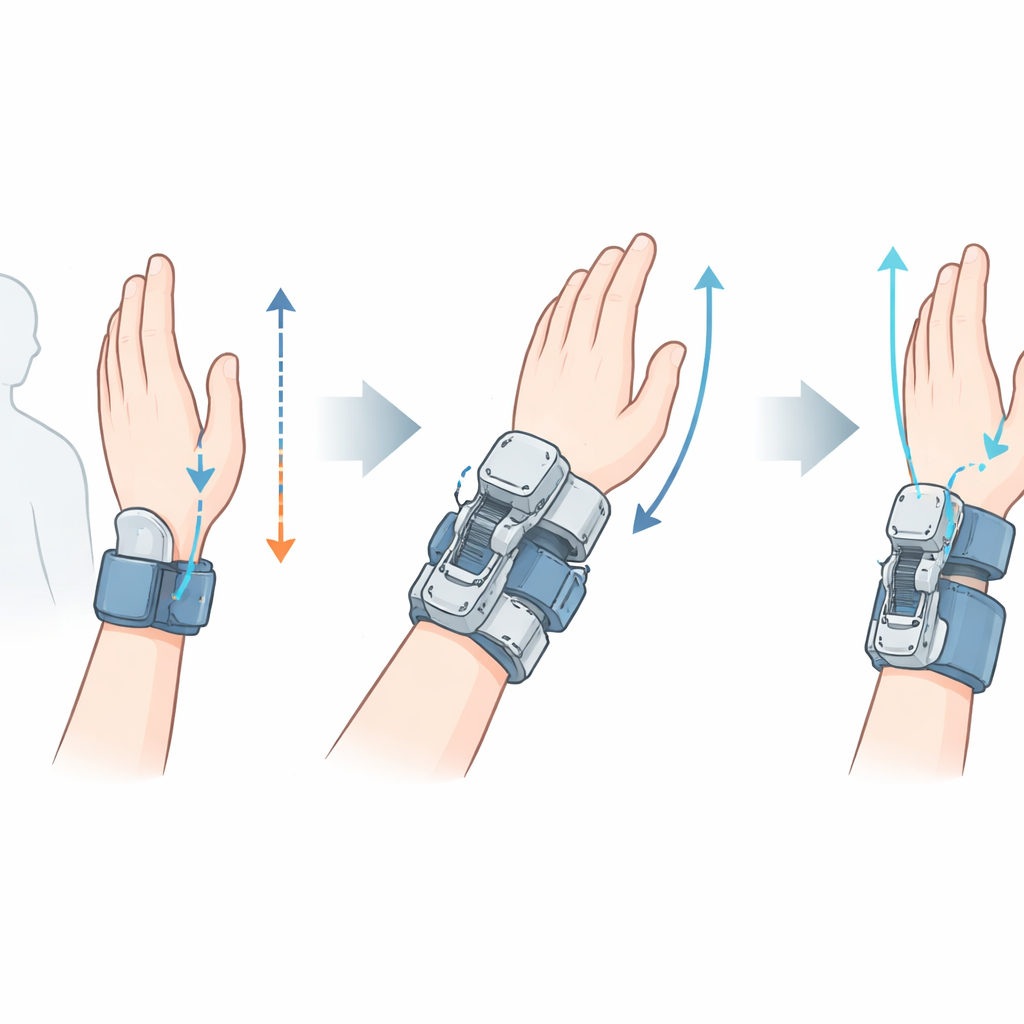
För att roboten ska kunna spela detta ”rörelsespel” måste den först sluta sig till hur starkt människan värderar noggrannhet kontra ansträngning—en dold preferens som varierar från person till person och till och med över tid. Författarna löser detta med en invers spelansats. När personen rör sig mäter sensorer deras ledvinkel och det vridmoment de producerar. Kontrollen söker sedan upprepade gånger efter den uppsättning mänskliga preferenser som bäst förklarar den senaste historien av rörelser och krafter. Med dessa preferenser i hand förutser den hur människan sannolikt kommer att agera över nästa korta horisont och beräknar robotens optimala assisterande kraft. Allt detta körs i realtid på ett handledsexoskelett som hjälper försökspersoner att följa ett rörligt mål med handen.
Människor och robotar lär sig koordinera
Teamet testade sin controller med trettio friska vuxna i tre experiment. I det första fick deltagarna instruktioner att växla mellan att aktivt följa målet och att vara passiva. Controllern justerade snabbt sin interna uppskattning av hur mycket personen brydde sig om noggrannhet, ökade under aktiva faser och sjönk nära noll när de slappnade av. I det andra experimentet växlade deltagarna mellan försök med och utan robotassistans. Med den nya controllern minskade roboten människans ledmoment och muskelaktivitet, samtidigt som spårningsnoggrannheten förbättrades. Över upprepade försök stabiliserade varje persons interaktionsmönster till en individuell ”jämvikt”, och korrelationen mellan mänskliga och robotiska krafter ökade—bevis på växande ömsesidig förståelse. I det tredje experimentet introducerade forskarna en enda assistansknapp, en meta-parameter som flyttar hur starkt roboten försöker minimera personens ansträngning. Att vrida på denna knapp förändrade smidigt hur mycket ansträngning människor valde att bidra med, utan att försämra uppgiftens prestanda.
Styra beteende med en enda ratt
Assistans-meta-parametern låter formgivare täcka ett spektrum av interaktionsstilar med en enda kontroll: från nästan ingen hjälp, via lika fördelning av ansträngning, till nära komplett stöd där roboten leder och människan kan slappna av. Vid mellanliggande inställningar tenderade människor att koordinera bäst med roboten, där var och en bar ungefär halva bördan. Mönstret av härledda mänskliga preferenser förblev konsekvent för varje person över olika assistansnivåer—utom när roboten gjorde nästan allt, då blev beteenden mer enhetliga eftersom människor i stort sett slutade engagera sig. Detta visar att roboten både kan avslöja individuella styrstilar och varsamt påverka dem, till exempel genom att be användare göra mer i en träningsfas och mindre i en annan.
Vad det innebär för rehabilitering och arbete
För en lekman är huvudbudskapet att denna controller får robotar att uppträda mer som smarta partners än stela maskiner. Genom att förutsäga hur vi avser att röra oss och justera hur mycket de hjälper kan robotar minska vår ansträngning när det behövs, uppmuntra oss att arbeta hårdare när det är nyttigt och hålla rörelserna korrekta och stabila. Samma matematiska ramverk kan finjusteras för rehabilitering—gradvis förskjuta ansträngning från robot till patient—eller för kollaborativ tillverkning, där människor och robotar delar laster på ett säkert och effektivt sätt. I grunden visar studien att människor naturligt anpassar sig till en robot som ”spelar samma spel” som de gör, vilket öppnar dörren för mer personligt anpassade och riktade former av interaktivt stöd.
Citering: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Nyckelord: människor-robotinteraktion, exoskelettstöd, spelteoretisk styrning, motorisk rehabilitering, delat styrande