Clear Sky Science · sv
Maskininlärningsunderlättad realtids akustisk fångst i tidsvarierande flermediumsmiljöer mot magnetresonansavbildningsstyrd mikrobubbelmanipulation
Vägleda små läkemedelsbärare med ljud och skanningar
Moderna cancerbehandlingar förlitar sig i allt högre grad på intelligenta läkemedelsbärare som kan leverera medicin direkt till tumörer samtidigt som frisk vävnad sparas. Den här studien utforskar ett framtidsinriktat sätt att styra sådana bärare inne i kroppen med hjälp av ultraljuds"fällor" styrda av magnetresonansavbildning (MRI). Genom att kombinera ljudvågor, medicinsk avbildning och maskininlärning syftar forskarna till att hålla mikroskopiska bubblor med läkemedel parkerade nära rörliga tumörer, även när kroppen rör sig vid varje andetag.
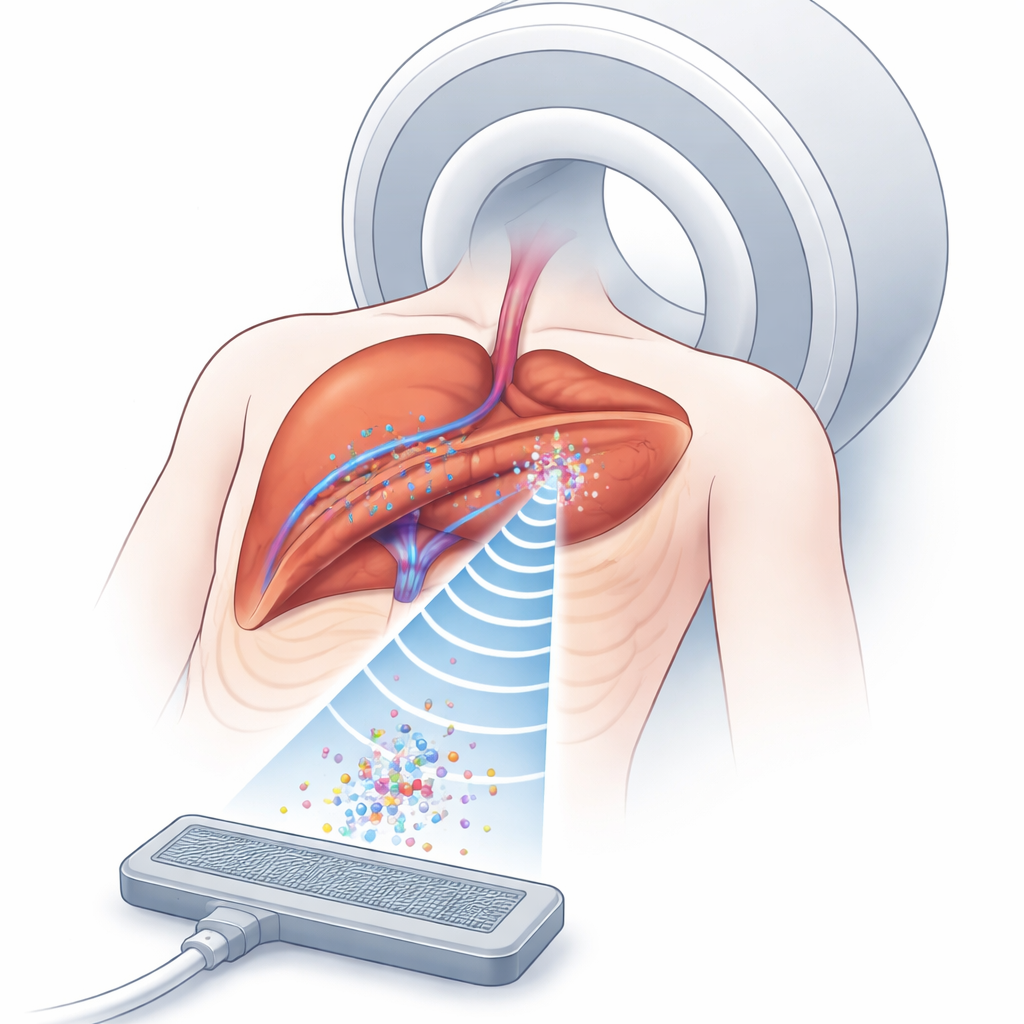
Varför det är viktigt att fånga mikroskopiska bubblor
Läkemedelsbärande mikrobubblor färdas genom blodkärl och kan släppa sin last när de utlöses av ultraljud. Utmaningen är att behålla tillräckligt många av dessa bubblor på rätt plats, tillräckligt länge, djupt inne i kroppen. Ultraljud kan skapa osynliga kraftfickor—akustiska fällor—som håller små föremål i vätskeflödet utan att röra dem. MRI kan samtidigt avbilda både vävnaden och mönstret av ultraljudseffekter, även inne i organ. Att sätta ihop dessa två verktyg erbjuder ett sätt att koncentrera läkemedelsbärare runt tumörer mer precist än enbart med läkemedel. Men i verkliga patienter böjer och förvränger vävnader av olika slag—fett, muskel, organ och rörliga lungor—ljudvågorna, vilket gör det mycket svårt att forma och upprätthålla en stabil fälla exakt vid tumörens position.
Problemet med en rörlig, lagerindelad kropp
I enkla miljöer som luft eller vatten vet ingenjörer redan hur man använder fasade arrays av ultraljudssändare för att skjuta, dra och snurra små objekt. Inne i kroppen måste ljudet emellertid korsa flera lager med olika densiteter och hastigheter, och gränsytorna mellan dem orsakar brytning och förvrängning. Traditionella beräkningsmetoder kan i princip korrigera för detta genom att räkna ut hur lång tid ljudet tar att färdas från varje sändare till målpunkten. Men sådana angreppssätt delar upp kroppen i miljontals små block och simulerar vågutbredningen genom varje—en extremt tidskrävande process som bara fungerar om vävnaderna förblir nästan helt stilla. Endast andning kan förskjuta bukvävnader med flera millimeter och snabbt göra en förberäknad lösning inaktuell.
Lära en modell att förutsäga ljudvägar
Författarna angriper denna flaskhals med en inlärningsbaserad modell som fungerar som en snabb genväg: i stället för att simulera ljudvågor varje gång tränar de ett neuralt nätverk för att förutsäga hur lång tid varje ultraljudspuls behöver för att nå en målpunktion. De bygger först en detaljerad virtuell miljö med en gaskammare separerad från luft av en tunn plastfilm, som efterliknar hur ljud passerar genom olika vävnadsskikt. Med en fysikbaserad simulator genererar de en träningsuppsättning av ljudets restider mellan många mål och en 14x14 ultraljudsarray. De låter också kammaren förskjutas i två riktningar för att imitera rörelse och beskriver dess position genom att spåra tre visuella markörer, liknande hur framtida MRI-synliga markörer skulle spåra en patients andning. Det tränade nätverket lär sig att avbilda önskad fällpositions plus kammarens position direkt till det erforderliga tidsmönstret för alla 196 sändare, och uppnår mikrosekundsnoggrannhet på bara omkring 26 millisekunder.
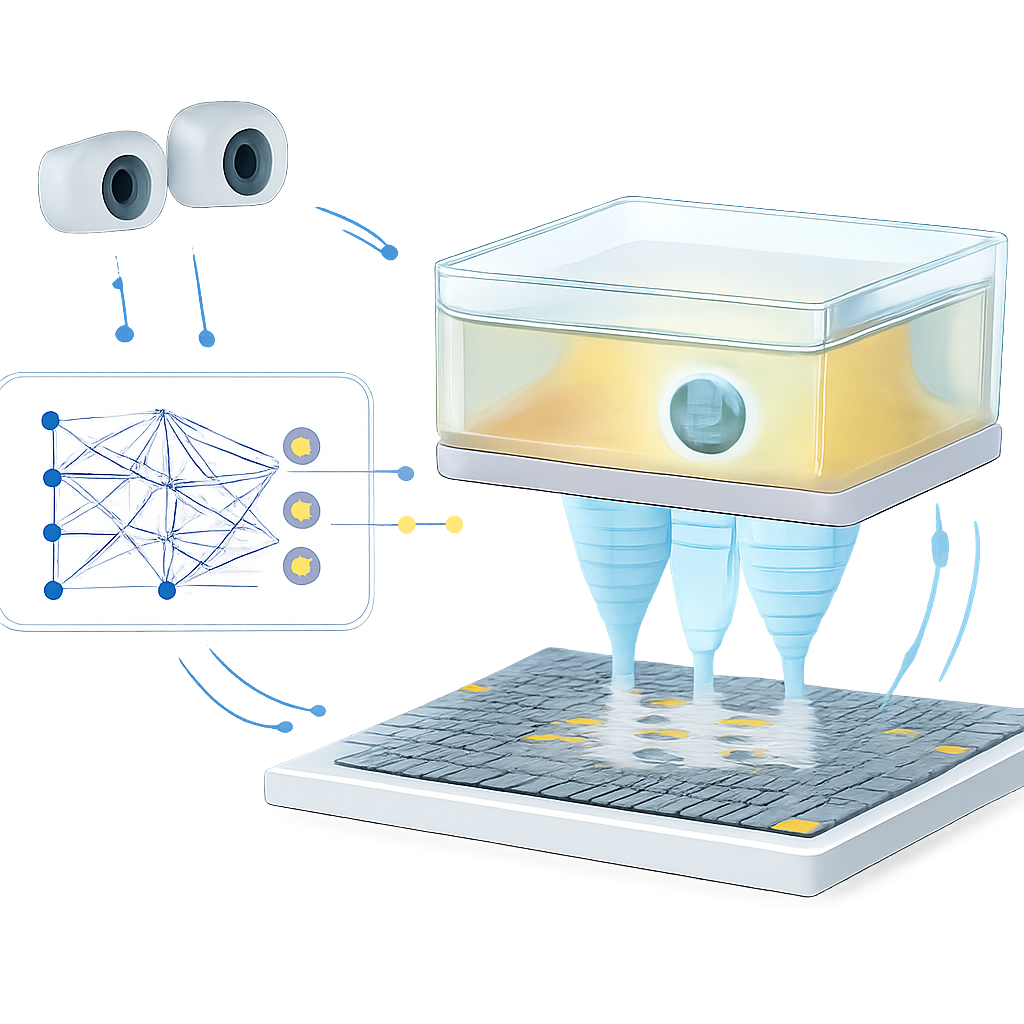
Sluta loopen med vision och snabba uppdateringar
Hastighet är inte tillräckligt; fällan måste också anpassa sig när miljön förändras oväntat. För att demonstrera detta bygger teamet ett slutet styrsystem. Stereo-kameror övervakar en liten polystyrenpärla som hålls uppsvävd av den akustiska fällan inne i den rörliga kammaren. När pärlan driver bort från sitt mål förbi en satt tröskel skjuter systemet målpositionen, matar de uppdaterade koordinaterna och kammarens läge till inlärningsmodellen och uppdaterar snabbt fase-mönstret som driver arrayen. I experiment kan systemet uppdatera fase-mönstret upp till 15 gånger per sekund och styra pärlan längs H-, K- och U-formade banor med cirka 1 millimeters genomsnittligt fel—jämförbart med positionsnoggrannheten hos vissa kliniska fokuserade ultraljudssystem. Samma återkopplingsprincip minskar också hur länge pärlan avviker från sin avsedda plats när kammaren rör sig, vilket visar att styrloopen kan kompensera för rörelse och oomodelerade effekter från plastfilmen och stödstrukturen.
Vad detta betyder för framtida behandlingar
För en icke-specialist är kärnbudskapet att forskarna har byggt en typ av fjärrstyrd, kontaktfri ”traktorstråle” som en dag skulle kunna parkera läkemedelsfyllda bubblor nära en tumör och hålla dem där, även när patienten andas. Deras maskininlärningsmodell ersätter tunga simuleringar med en snabb förutsägare, medan kameror (och så småningom MRI-markörer) berättar för systemet hur kroppen rör sig så att fällan kan ställas om i realtid. Även om det nuvarande arbetet använder luft, gaser och plast snarare än riktig vävnad, och leviterar en plastpärla i stället för verkliga mikrobubblor, demonstrerar det realtidskontroll i ett rörligt, lagerindelat medium. Med starkare hårdvara, högre ultraljudsfrekvenser och MRI-baserad rörelsespårning kan detta tillvägagångssätt utvecklas till ett kliniskt verktyg för MRI-styrda, robotassisterade ultraljudsbehandlingar som levererar läkemedel mer precist och säkert djupt inne i kroppen.
Citering: Wu, M., Li, X. & Tang, T. Machine learning-facilitated real-time acoustic trapping in time-varying multi-medium environments toward magnetic resonance imaging-guided microbubble manipulation. Commun Eng 5, 52 (2026). https://doi.org/10.1038/s44172-026-00600-z
Nyckelord: akustisk fångst, MRI-styrd terapi, mikrobubbel-läkemedelsleverans, maskininlärning i ultraljud, icke-invasiv robotmanipulation