Clear Sky Science · sv
Konstgjord röntgendriven spårning och styrning av miniatyrmedicinska instrument
Mindre verktyg, säkrare operationer
Kirurger börjar använda små, trådlösa medicinska verktyg som kan krypa genom blodkärl och andra smala passager för att leverera läkemedel, öppna tilltäppta artärer eller mäta vitala signaler långt inne i kroppen. Dessa miniatyrinstrument lovar skonsammare ingrepp och snabbare återhämtning — men bara om läkare kan se och styra dem säkert i realtid. Denna artikel presenterar MicroSyn-X, ett nytt sätt att lära datorer att spåra dessa små instrument på röntgenbilder, vilket banar väg för mer precisa och mindre invasiva operationer.
Problemet med osynliga hjälpare
Dagens arbetsverktyg för kirurgisk bildgivning är röntgenfluoroskopi, som visar rörliga skuggor av ben, kärl och instrument på en skärm. Miniatyrinstrument är dock så små och svaga att de ofta smälter ihop med det brusiga bakgrunden. De kan döljas av ben, metallverktyg eller kontrastmedel, och mjuka eller flytande robotar ändrar ständigt form när de rör sig. Människor måste noggrant följa skärmen och manuellt justera magneter eller katetrar, en långsam och tröttande process som ökar risken för misstag. Att träna datorseende — mjukvara som kan "se" själv — skulle kunna hjälpa, men det kräver oftast stora samlingar av noggrant märkta bilder. För dessa nya enheter finns sådana datamängder nästan inte alls eftersom insamling är dyrt, tidskrävande och begränsat av patientsekretess.
Att lära datorer med falska, men trovärdiga, röntgenbilder
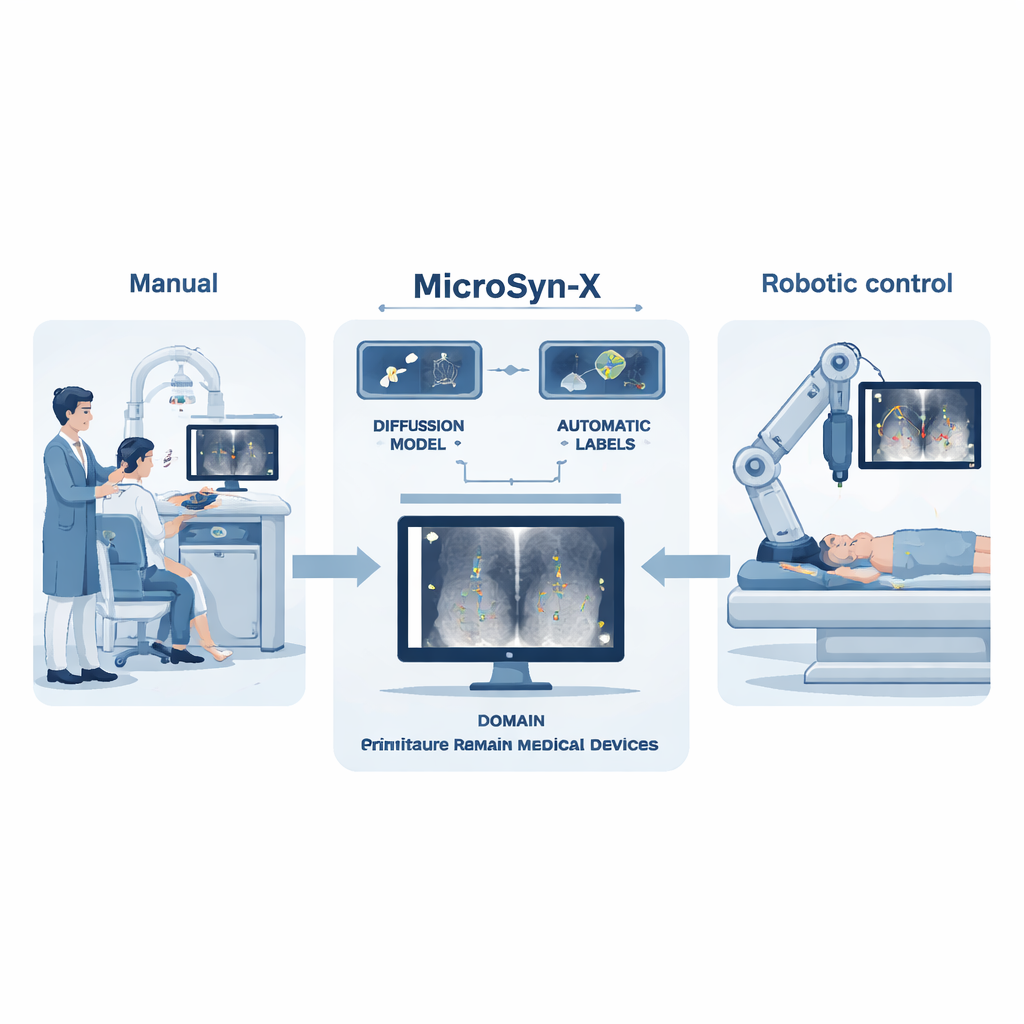
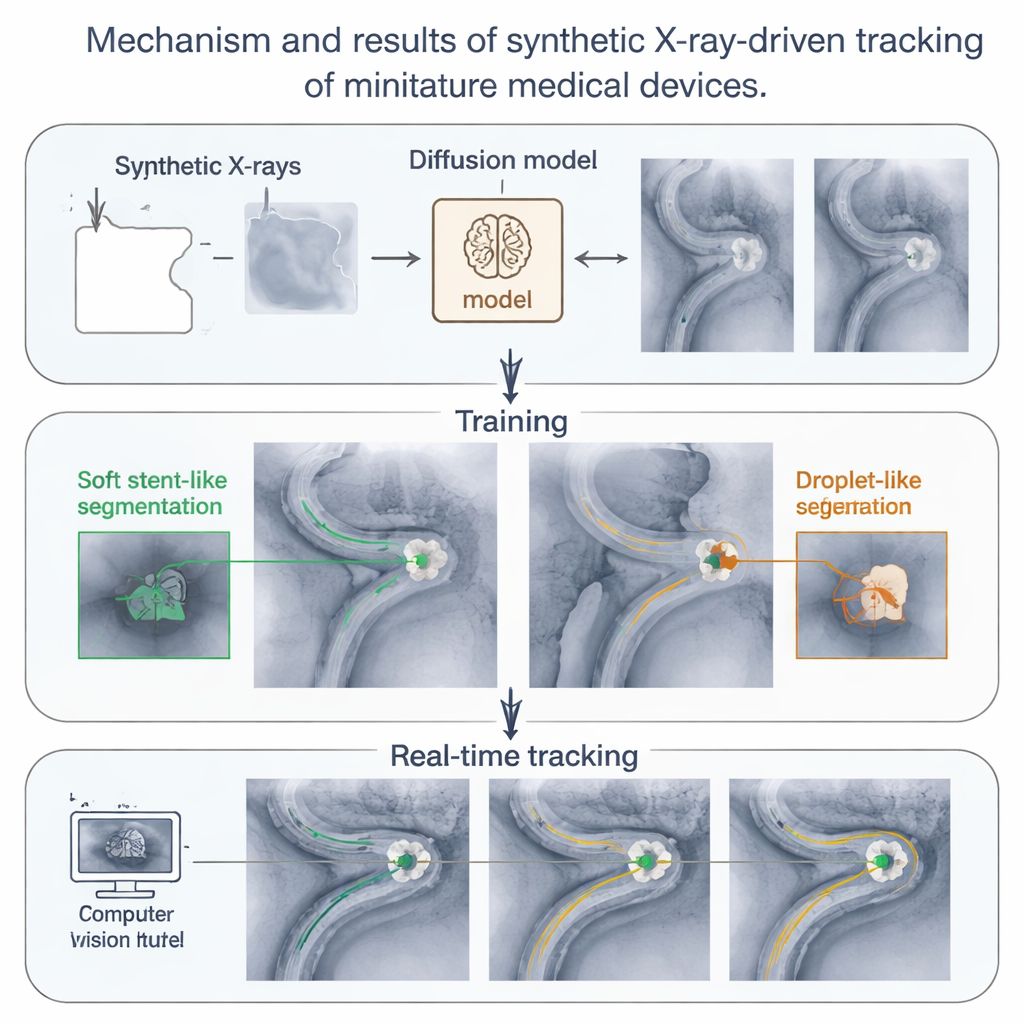
MicroSyn-X löser denna dataknäpp genom att skapa sina egna högrealistiska röntgenbilder, kompletta med inbyggda etiketter som berättar exakt var varje instrument befinner sig för en inlärningsalgoritm. Först använder systemet en modern bildgenerator kallad en diffusionsmodell för att producera livlika röntgenbakgrunder av organ, ben och kirurgiska verktyg, styrda av enkla prompts och grova masker som markerar vävnad, metall och fluidfyllda kanaler. Därefter blandas bilder av miniatyrinstrumenten — antingen fotograferade en gång mot en ren bakgrund eller matematiskt framställda för flytande droppar — digitalt in i dessa scener så att de ser ut som om de verkligen var inne i kroppen. Eftersom datorn vet exakt var varje enhet placerades genererar den automatiskt precisa konturer och omgivande rutor, vilket eliminerar tidsödande manuell märkning.
Förbereda för verkligheten med kontrollerat kaos
En central nyhet i MicroSyn-X är "domänrandomisering", en avsiktlig injektion av variation i de syntetiska bilderna. Systemet ändrar automatiskt organformer, enhetspositioner, ljusstyrka, brusnivå och även hur mycket enheterna döljs av ben eller verktyg. Det skapar också många olika former för flytande robotar, som kan sträcka ut sig, dela upp sig i svärmar och gå ihop igen. Genom att utsätta inlärningsalgoritmen för tusentals något olika situationer — många av dem ovanliga eller svåra att fånga i verkliga patienter — tränar författarna modeller som fokuserar på instrumentens väsentliga visuella ledtrådar snarare än på ytliga mönster. Tester visar att modeller som enbart tränats på dessa syntetiska bilder kan matcha eller överträffa modeller tränade på riktiga röntgenbilder, särskilt i svåra fall med låg kontrast, högt brus eller kraftig ocklusion.
Från datorskärm till robot i operationssalen
Forskarna går bortom mjukvarudemonstrationer och kopplar MicroSyn-X direkt till ett robotsystem. En robotarm håller en stark magnet nära vävnad medan en C-arm-fluoroskop fångar röntgenbilder. Det MicroSyn-X-tränade visionsmodellen hittar mjuka, stentformade robotar och flytande droppar i varje bildruta, och en spårningsalgoritm fogar ihop dessa detektioner till jämna banor, även när enheterna tillfälligt försvinner bakom ben. Med denna återkoppling styr roboten instrument genom snirkliga konstgjorda kärl, riktiga djurorgan utanför kroppen och levande artärer i kaniner och råttor. Systemet styr framgångsrikt flera enheter samtidigt, följer dem genom förgrenade kärl och övervakar svärmar av flytande droppar som delar sig och förenas under magnetisk kontroll — allt i realtid under utmanande bildförhållanden.
Mot smartare, mindre invasiv vård
Enkelt uttryckt visar detta arbete att datorer kan lära sig att spåra små kirurgiska verktyg säkert inuti kroppen genom att öva på stora bibliotek av noggrant framställda "falska" röntgenbilder istället för på knappa verkliga sådana. MicroSyn-X förvandlar syntetisk bildgivning till en praktisk motor för robotik: det skapar realistiska träningsdata, lär visionsmodeller och matar deras output till ett magnetiskt navigationssystem som redan fungerat i levande djur. När dessa metoder mognar och testas i mer komplexa fall kan de hjälpa kirurger att utföra känsliga ingrepp med större noggrannhet och mindre belastning, och föra oss närmare en framtid där flottor av minirobotar tyst förbättrar behandlingar inifrån.
Citering: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Nyckelord: miniatyrmedicinska instrument, röntgenavbildning, syntetiska data, medicinsk robotik, datorseende