Clear Sky Science · sv
Inbäddat interaktionsnätverk ökar reaktionsförmågan i kollektivt beteende
Hur djurmassor håller sig så skarpt synkroniserade
Stora djurgrupper verkar ofta svänga, ducka eller fly som om de vore en enda varelse. Denna artikel utforskar hur den dolda "vem-följer-vem"-strukturen inom ett fiskstim — och inom robotsvärmar inspirerade av dem — gör att hela gruppen kan reagera snabbt och pålitligt när omständigheterna ändras.
Vägledningslager inom en rörlig massa
När vi ser ett fiskstim virvla bort från fara är det frestande att tro att varje fisk helt enkelt kopierar sina grannar samtidigt. Författarna visar att verkligheten är mer nyanserad: det finns ett osynligt mönster av vägledning där vissa fiskar påverkar många andra och några främst följer. Detta mönster är inte en rigid rangordning, utan ett flexibelt nät av ledar–följare-länkar som förändras med vilken sorts rörelse gruppen utför. Den centrala strukturella egenskap forskarna fokuserar på kallas "inbäddning" (nestedness): ledare högre upp påverkar inte bara sina närmaste följare utan styr också indirekt många lägre nivåers fiskar längre ner i kedjan.
Vad fiskstim avslöjar om snabba manövrer
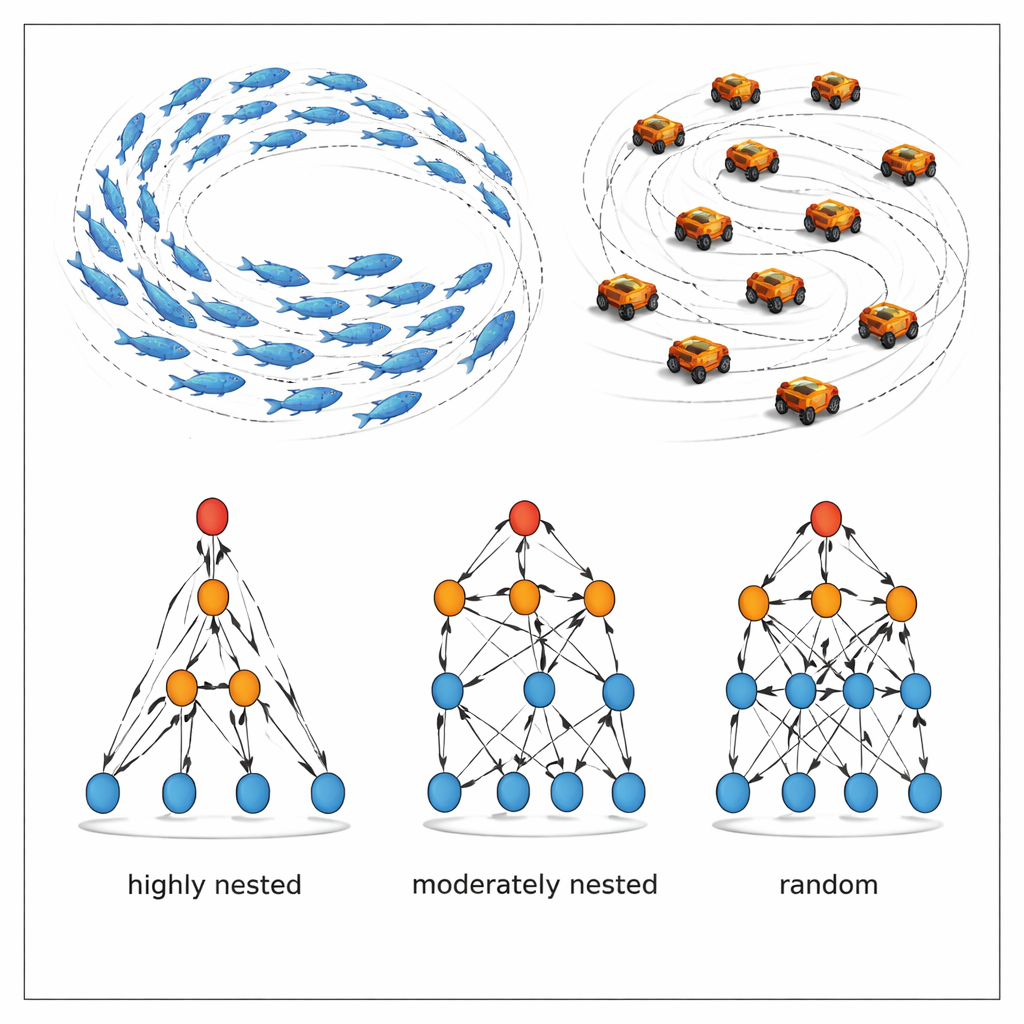
Teamet filmade små stim av rummy‑nose tetra i en grund rund tank och spårade varje fisks position och riktning över tid. Från dessa banor rekonstruerade de vem som tenderade att röra sig först och vem som reagerade senare, och byggde ett riktat påverkansenätverk för varje grupp. De mätte också hur skarpt stimmet svängde (krökning) och hur tätt fiskarna var alignerade (polarisation). De fann att när gruppen utförde snabba, slingrande manövrar med frekventa riktningsförändringar var det underliggande nätverket starkt inbäddat: ett fåtal fiskar påverkade många, och påverkansmönstret liknade en prydlig triangelkaskad. I kontrast, när stimmet gled stadigt i en riktning var nätverket mindre inbäddat och mer egalitärt, även om fiskarna förblev väl alignerade.
Test av informationsflöde i idealiserade nätverk
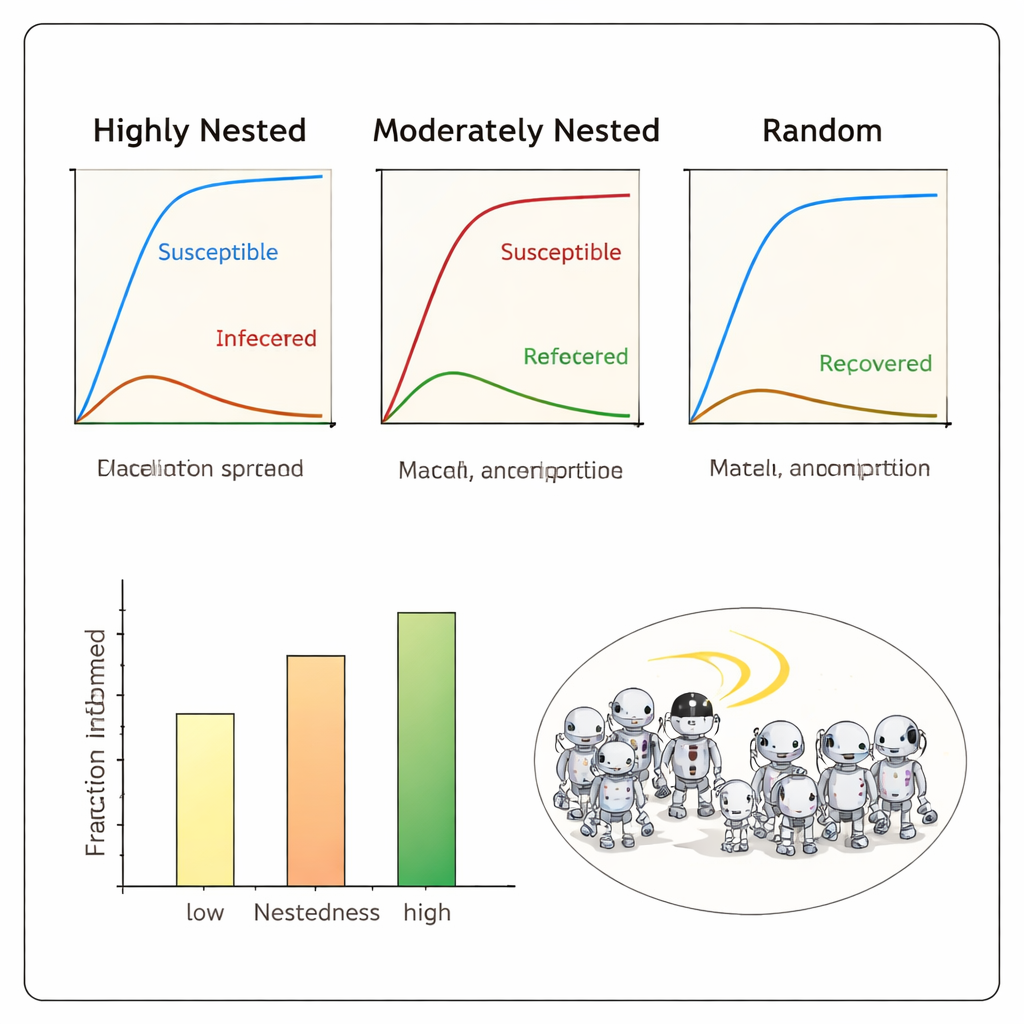
För att förstå varför inbäddade strukturer kan hjälpa, vände sig författarna till en enkel spridningsmodell som ofta används för epidemier. Här betyder en nod som blir "infekterad" att den plockat upp och förmedlar en riktningssignal, inte en sjukdom. De jämförde perfekt inbäddade ledar–följare-nätverk med delvis inbäddade och slumpmässiga nätverk, samtidigt som det totala antalet länkar hölls konstant. I det mest inbäddade fallet nådde en signal som startades längst upp snabbt nästan varje nod, och gjorde det även när noder återhämtade sig (slutade sända) relativt snabbt. När nätverket randomiserades och inbäddningen minskade, stannade signalen upp: många noder förblev oinformerade, antalet aktiva sändare i toppen sjönk, och modellen krävde många fler initiala signalkällor för att uppnå samma täckning.
Från ekvationer till svängande robotmassor
Studien frågade sedan om dessa strukturella fördelar översätts till faktisk rörelse. Författarna byggde en "självdriven" svärmmodell där varje individ väljer vem den följer baserat på hur påfallande en grannes rörelse ter sig, men med en vridning: regeln bygger preferentiellt en inbäddad hierarki där mer "salienta" rörare blir ledare för många andra. De jämförde detta perfekt inbäddade schema med två vanliga alternativ: ett där varje granne har lika stor påverkan och ett där påverkan vägs jämnt av rörelsesignaler. I simulerade grupper som skulle utföra upprepade stora svängar beordrade av några informerande individer, lät det inbäddade schemat massan följa målriktningen närmare och med mindre fördröjning, även när avsevärd brus lades till rörelsen.
Riktiga robotar som beter sig som fiskstim
Slutligen implementerade forskarna sin inbäddade nätverksstyrning på femtio små hjulburna robotar som rörde sig i en plan arena. I en "hovrings"-uppgift försökte en enda informerad robot hålla gruppen cirklande kring ett område. Med en konventionell viktad-granne-regel var svärmarnas bana jämn och trög, med bara milda böjar. Med den inbäddade regeln utförde robotarna skarpare, mer beslutsamma svängar och följde den informerade robotens förändringar nära. I en "följ"-uppgift, där en informerad robot gjorde oförutsägbara riktningsskiften, höll den inbäddningsstyrda svärmen sig återigen närmare både i position och riktning, medan jämförelsesvärmen jämnade ut eller missade många av svängarna.
Varför detta betyder något bortom fisk och robotar
I vardagliga termer visar arbetet att hur en massa är kopplad spelar lika stor roll som hur känsliga dess medlemmar är. Ett starkt inbäddat påverkansnät — en lagerkedja där ledare högre upp når många andra — gör att grupper reagerar snabbare och mer pålitligt på viktiga signaler utan att överväldigas av brus. Dessa insikter kan hjälpa biologer att tolka djursvärmar, vägleda designen av drönar‑ eller undervattensrobotteam som måste reagera snabbt i riskfyllda miljöer, och till och med informera hur vi organiserar mänskliga nätverk när snabb, samordnad handling är avgörande.
Citering: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Nyckelord: kollektivt beteende, fiskstim, svärmrobotik, informationstransfer, nätverkshierarki