Clear Sky Science · sv
Flerstegs Kalman-filtreringssystem för sensorfusion integrerat med MoS2-memtransistor med 1024 ledningsnivåer
Smartare uppfattning för säkrare självkörande bilar
Moderna självkörande bilar förlitar sig på en svärm av sensorer för att förstå vägen, men att snabbt och effektivt slå samman all denna information är synnerligen svårt. Denna studie visar hur en ny typ av liten elektronisk komponent, kallad memtransistor, kan påskynda och förenkla den här sammanslagningsprocessen, känd som sensorfusion. Genom att flytta nyckelberäkningar från skrymmande digitala kretsar till slank analog hårdvara minskade forskarna både energianvändning och fördröjning avsevärt, vilket pekar mot säkrare, mer responsiva autonoma system som kan hantera dåligt väder, blockerade siktlinjer och trånga gator.
Varför många ögon är bättre än ett
På dagens testbanor och motorvägar betraktar autonoma fordon omvärlden med en blandning av kameror, laseravståndsmätning (LiDAR), millimetervågsradar och rörelsesensorer som spårar hur bilen rör sig. Var och en av dessa har sina styrkor och svagheter: LiDAR kan blockeras av lastbilar eller byggnader, radar har svårt med fina detaljer och rörelsesensorer driver långsamt bort från verkligheten om de används ensamma. För att få en tillförlitlig bild av omgivande trafik måste fordonet slå ihop dessa ofullkomliga vyer till en konsekvent uppskattning av var saker befinner sig och hur de rör sig. Ett matematiskt verktyg kallat Kalman-filter har blivit ett arbetsredskap för att göra detta i realtid, men i konventionell form körs det på digitala processorer som förbrukar kraft och inför fördröjningar när data upprepade gånger förs mellan analoga sensorer och digital logik.

En ny typ av elektroniskt byggblock
Teamet angriper problemet med en enhet byggd av ett enda atomlager av halvledaren molybden-disulfid (MoS2). Deras memtransistor kombinerar rollerna som ett minnes-element och en transistor i en och samma treterminalstruktur, vars elektriska ledningsförmåga kan ställas in mjukt och sedan kommas ihåg även när strömmen är avstängd. Genom att noggrant kontrollera små vakansplatser i materialets atomgitter med elektriska fält kan enheten pålitligt hålla 1024 distinkta ledningsnivåer över ett brett område och bevara dem i mer än ett år. Lika viktigt är att dessa nivåer förändras nästan linjärt när styrspänningen sveps, vilket gör det möjligt att mappa en önskad matematisk vikt i Kalman-filtret direkt på en fysisk inställning av memtransistorn.
Att göra om matematik till hårdvara
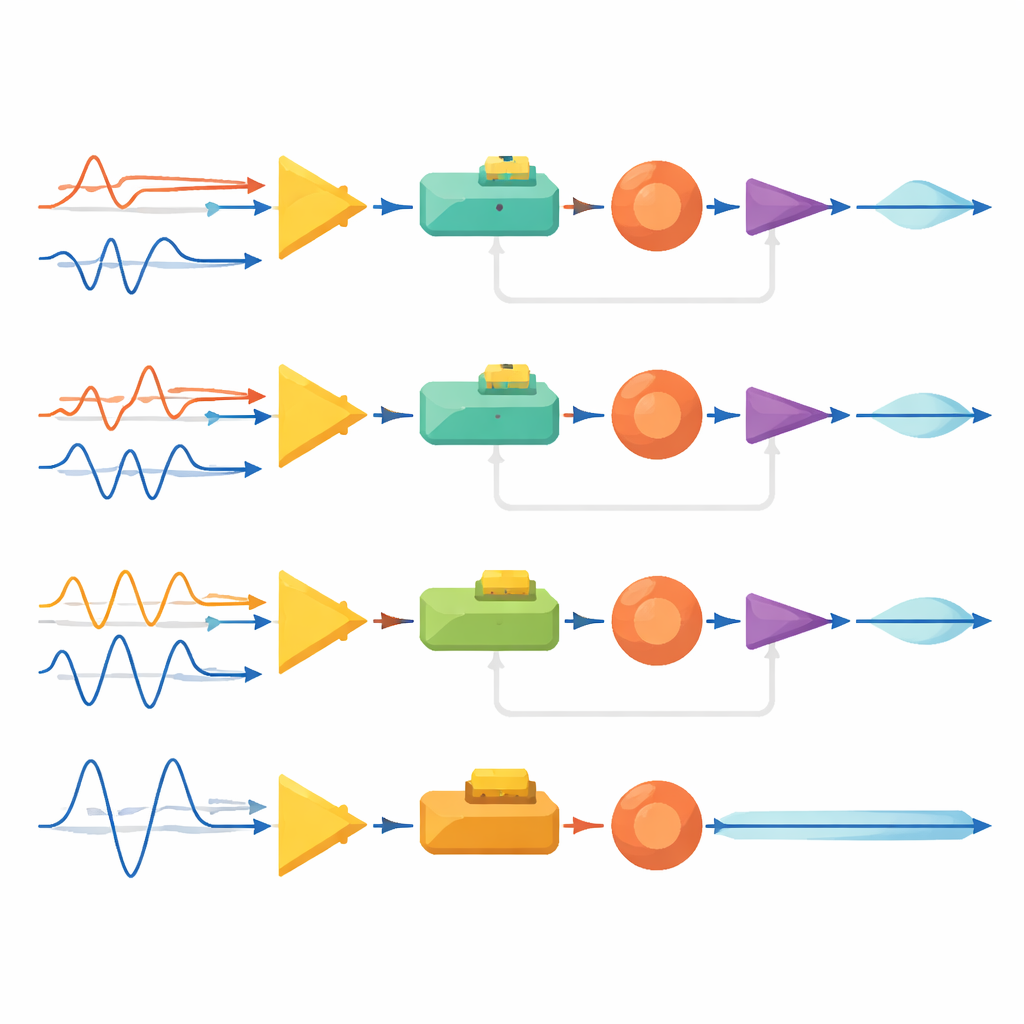
Byggt kring denna enhet designar forskarna en analog version av ett flerstegs Kalman-filter som arbetar direkt på sensorspänningar istället för på digitala tal. Kretsen består av tre seriekopplade steg som uppskattar fordonets position, hastighet och acceleration. Inom varje steg utförs grundläggande operationer såsom subtraktion, integration, addition och differentiering av kompakta analoga moduler. Den avgörande ’gain’-faktorn som talar om för filtret hur mycket det ska lita på nya sensoravläsningar kontra sina egna förutsägelser implementeras med memtransistorns ledningsförmåga. Genom att enkelt justera en gate-spänning kan systemet smidigt ändra hur starkt det lyssnar på LiDAR, radar eller rörelsesensorer, utan att behöva skriva om någon programvara.
Körscenarier och hårda förhållanden
För att visa hur detta fungerar i praktiken implementerar teamet hela det trestegsfiltrets på ett kretskort fyllt med deras MoS2-enheter och standardanaloga komponenter. De matar in realistiska, brusiga signaler som efterliknar vad LiDAR, radar och rörelsesensorer skulle se under en filbyteöverhoppningsmanöver på motorvägen. När signalerna passerar genom varje steg blir utsignalerna renare och ger konsekventa uppskattningar av position, hastighet och acceleration samtidigt som skarpa förändringar som är viktiga för säkerheten, som plötslig inbromsning, bevaras. Systemet är särskilt imponerande när en sensor blir opålitlig eller blockerad — till exempel när en lastbil tillfälligt döljer ett annat fordon för LiDAR. Genom att sänka gain kopplad till den komprometterade sensorn i hårdvaran skiftar det analoga filtret automatiskt sitt beroende till de återstående ingångarna och tidigare rörelsemönster, vilket håller uppskattningarna av hastighet och acceleration jämna och fysiskt rimliga.
Snabbare, smalare hjärnor för maskiner
Jämfört med en standard digital implementation av samma filtreringsuppgift använder det analoga memtransistor-baserade systemet cirka 13 gånger mindre energi och slutför sina beräkningar ungefär 59 gånger snabbare, samtidigt som det hanterar tre viktiga rörelsevariabler på en gång. Eftersom enheterna är kompakta, stabila och kompatibla med storskalig tillverkning antyder detta angreppssätt framtida ”i-sensorn” eller ”nära-sensorn” bearbetningsblock som kan placeras nära kameror och radar i bilar, drönare och andra uppkopplade maskiner. För icke-specialister är slutsatsen att genom att låta fysiken hos avancerade material utföra en del av matematiken kan ingenjörer bygga smartare, snabbare och mer effektiva elektroniska ”hjärnor” som hjälper autonoma system att navigera pålitligt även när bilden av världen är långt ifrån perfekt.
Citering: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Nyckelord: självkörning, sensorfusion, Kalman-filter, memtransistor, analog beräkning