Clear Sky Science · sv
Objektmedveten semantisk kartläggning med sannolikhetstäthetsfunktioner för inomhusrelocalisering och ruttplanering
Varför smartare inomhuskartor är viktiga
När hem- och servicrobotar flyttar från laboratorier in i verkliga lägenheter måste de mer än bara undvika väggar och möbler. För att vara verkligt hjälpsam bör en robot förstå att en säng oftast indikerar ett sovrum, eller att ett kylskåp tyder på ett kök. Denna artikel presenterar ett nytt sätt för robotar att ”se” inomhusmiljöer genom de objekt som definierar varje rum, så att de kan lista ut var de befinner sig och välja rutter som bättre överensstämmer med hur människor använder sina hem.
Se rum genom deras vardagsföremål
Traditionella robotkartor fokuserar antingen på rå geometri eller på abstrakta symboler. Rutnätskartor byggda från laserskanningar fångar detaljerade former, men blir tunga att lagra och långsamma att söka i, och kan leda till stela, rutnätslika rutter. Högre nivåers grafer över rum och dörrar är lättare att hantera, men slänger bort den finkorniga information som behövs för precis körning. Författarna överbryggar denna klyfta genom att organisera kartor kring rum och de viktiga statiska objekten i dem – sängar, soffor, kylskåp, bord med flera. Varje rum markeras på en platt planritning, och varje viktig objektklass får sitt eget lager, så att olika typer av möbler aldrig skriver över varandra.
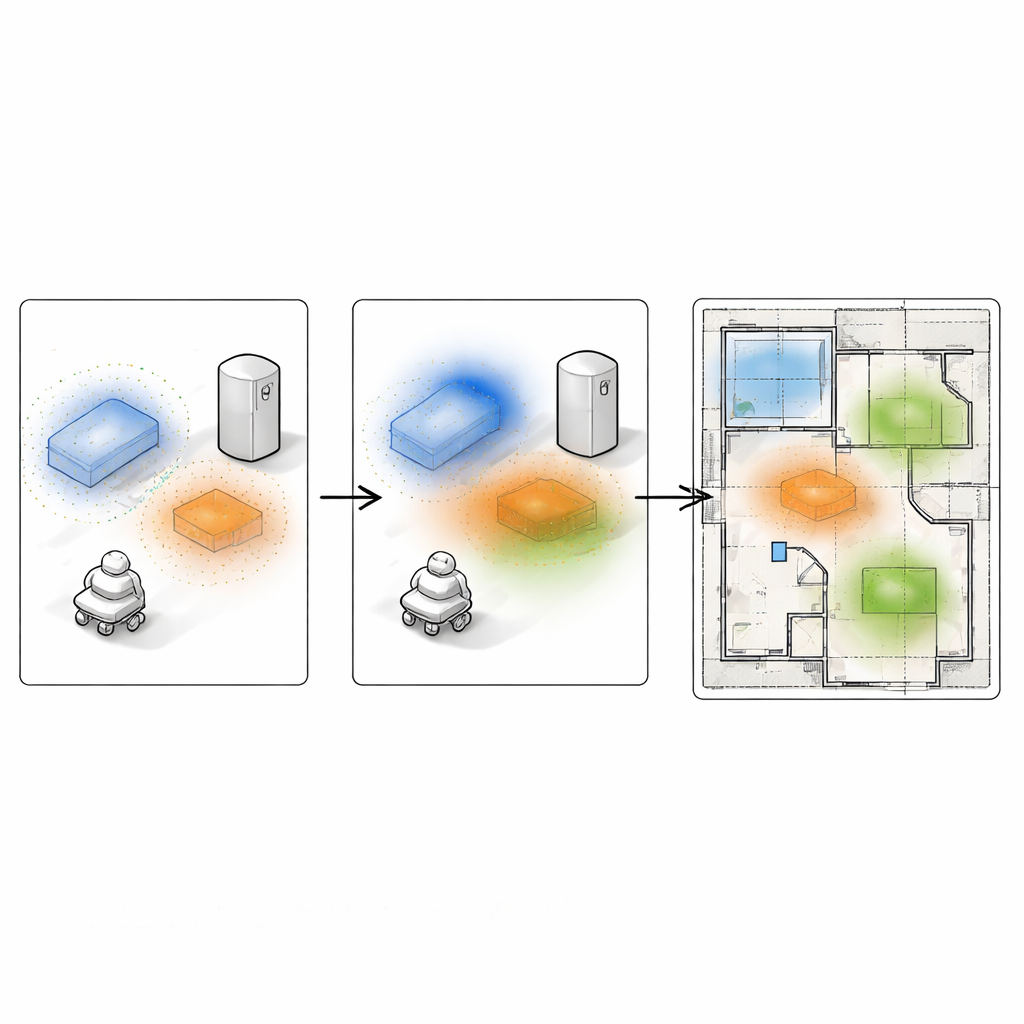
Förvandla möbler till mjuka sannolikhetsmoln
I stället för att rita varje objekt som en skarp låda omvandlar metoden 3D-skanningar av möbler till jämna ”värmekartor” på golvet. Roboten rekonstruerar först varje rum i 3D med en RGB‑D-kamera och vanliga verktyg, och semantiskt klassificerar därefter punkter som hör till objekt som väggar, sängar eller stolar. För varje objekttyp i ett rum hittas kluster av punkter som projiceras ner på golvet. Från dessa kluster uppskattar systemet en kontinuerlig sannolikhetstäthet – en mjuk blobb som är högst där objektet sannolikt befinner sig och tonar ut mjukt utåt. Genom att stapla dessa blobbar per objekttyp skapas en kompakt, lager-på-lager-karta som bevarar både objektsbetydelsen och deras ungefärliga form, samtidigt som den hanterar brus och partiella vyer på ett naturligt sätt.
Låta robotar återupptäcka var de är
Ett huvudsyfte med denna objektcentrerade karta är att hjälpa en robot att lokalisera sig när den inte har någon aning om var den är på planritningen – ett vanligt problem när roboten precis vaknar eller har flyttats. Roboten tar en ny titt med sin djupkamera, upptäcker objekt i synfältet och bygger en egen liten uppsättning sannolikhetsblobbar för den partiella scenen. Därefter utforskar en evolutionär sökalgoritm många möjliga robotposer över byggnadens karta. För varje kandidatpose läggs de lokala blobbarna över den globala kartan och deras likhet mäts med ett statistiskt avstånd. Rumsgränser och siktkontroller sorterar bort omöjliga poser, som att se ett kylskåp genom en vägg. Över många generationer utvecklas populationen av kandidatposer mot den plats där de observerade objekten bäst matchar de lagrade sannolikhetsfältet, vilket ger en robust uppskattning av robotens position och orientering.
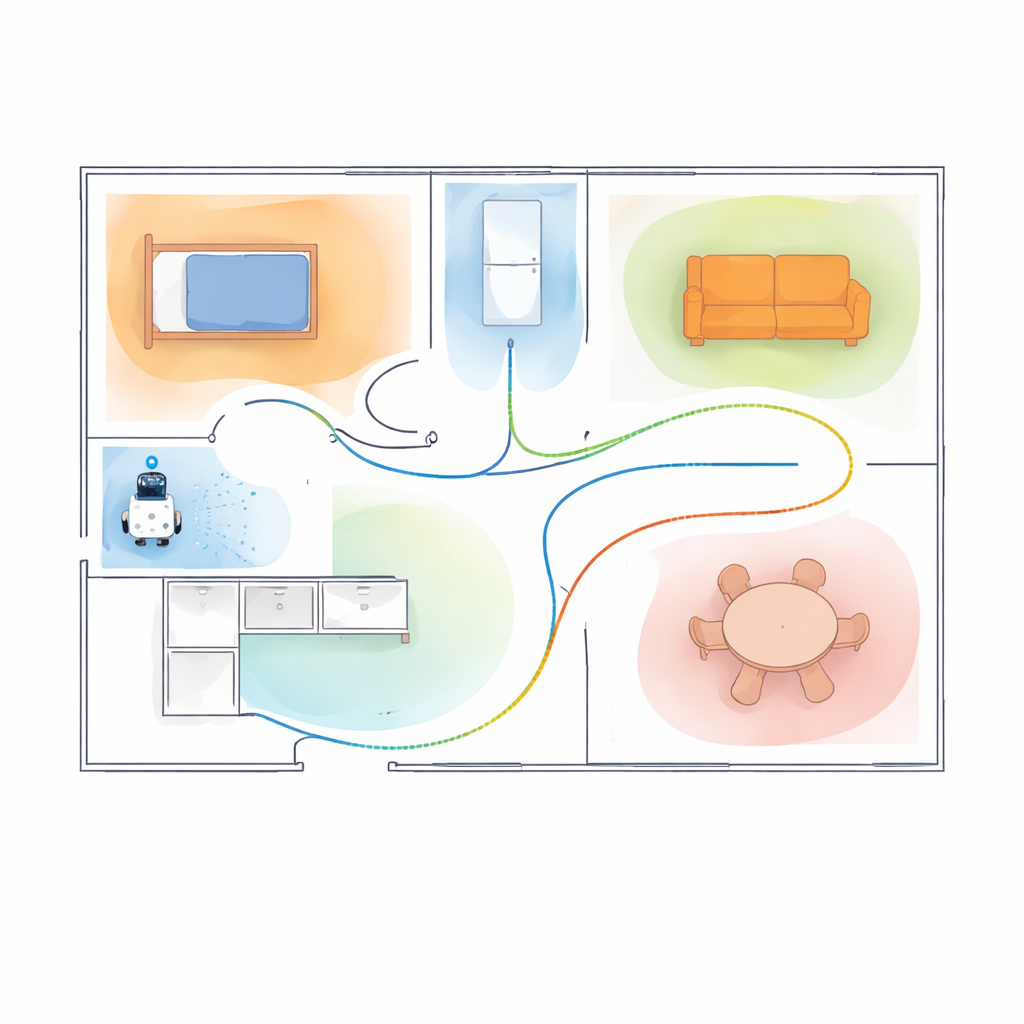
Planera rutter som respekterar hur människor använder utrymmen
Samma karta styr också hur roboten rör sig. Eftersom varje objekttyp representeras som ett mjukt påverkanfält kan roboten instrueras att favorisera eller undvika vissa områden genom att justera numeriska vikter. Sängar kan bli områden att hålla sig borta från på natten, medan bord kan bli attraktorer vid sökandet efter föremål. Dessa semantiska preferenser kombineras med en standardkarta över hinder och en säkerhetsmarginal runt väggar för att bilda ett enda kostnadslandskap över planritningen. En klassisk ruttplanerare hittar sedan rutter som inte bara är kollisionsfria utan också följer önskade sociala eller uppgiftsrelaterade biaser. Experiment i en realistisk dataset och i en verkligt möblerad lägenhet visar att dessa semantiskt vinklade rutter bättre följer avsedda preferenser, ibland till priset av små ökningar i ruttlängd, och kan vara mjukare i verkliga hem.
Vad detta betyder för vardagsrobotar
Kort sagt lär sig detta arbete robotar att se hem som människor gör: som rum definierade av sina möbler, inte bara som tomma lådor med väggar. Genom att omsluta varje nyckelobjekt i ett mjukt sannolikhetsmoln kan en enda kompakt karta stödja både ”Var är jag?” och ”Hur ska jag ta mig dit?” utan behov av separata, uppgiftsspecifika modeller. Tester visar att detta tillvägagångssätt hjälper robotar att lokalisera sig mer tillförlitligt i röriga eller likartade rum och att välja rutter som bättre motsvarar mänskliga förväntningar. När dessa idéer mognar kan framtida hemrobotar navigera mer artigt och intelligent och röra sig genom våra utrymmen med en medvetenhet som känns betydligt mindre mekanisk.
Citering: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Nyckelord: inomhusrobotlokalisering, semantisk kartläggning, objektmedveten navigation, probabilistiska robotkartor, ruttplanering