Clear Sky Science · sv
Djup probabilistisk körbarhet med testtidsanpassning för osäkerhetsmedveten planetarisk rovernavigation
Varför säkrare roverkörning är viktigt
När vi skickar hjulburna robotar till Månen eller Mars måste de köra över sand, sten och sluttningar utan mänsklig hjälp. Ett enda felaktigt antagande om hur mjuk marken är kan lämna en miljarddollarsrover fast i evighet, som när NASA:s Opportunity-fastnade i vågmönstrad sand i veckor. Denna studie introducerar ett nytt sätt för rovrar att "känna" hur riskfylld marken framför är, göra säkrare ruttval och till och med lära sig av sina misstag medan de kör.
Mjuka underlag som en dold fara
På andra världar är de farligaste hindren inte alltid block eller klippor, som kameror lätt kan se, utan bedrägligt släta fläckar av lös jord. När roverhjul spinner i den här typen av terräng slirar fordonet, kryper fram mycket långsammare än vad som kommenderats, slösar energi och kan bli permanent immobiliserat. Traditionella navigeringssystem fokuserar främst på synliga geometriska faror—vad som ser ut som ett hinder och vad som inte gör det—utan att fullt ut fånga hur marken kommer att bete sig under hjulen. Samtidigt kan maskininlärningsmetoder som försöker förutsäga hjulslirning från bilder och 3D-kartor ha fel i okända förhållanden, som ny belysning eller brantare sluttningar, och de anger vanligtvis inte hur osäkra deras förutsägelser är.
Att lära en rover resonera kring risk
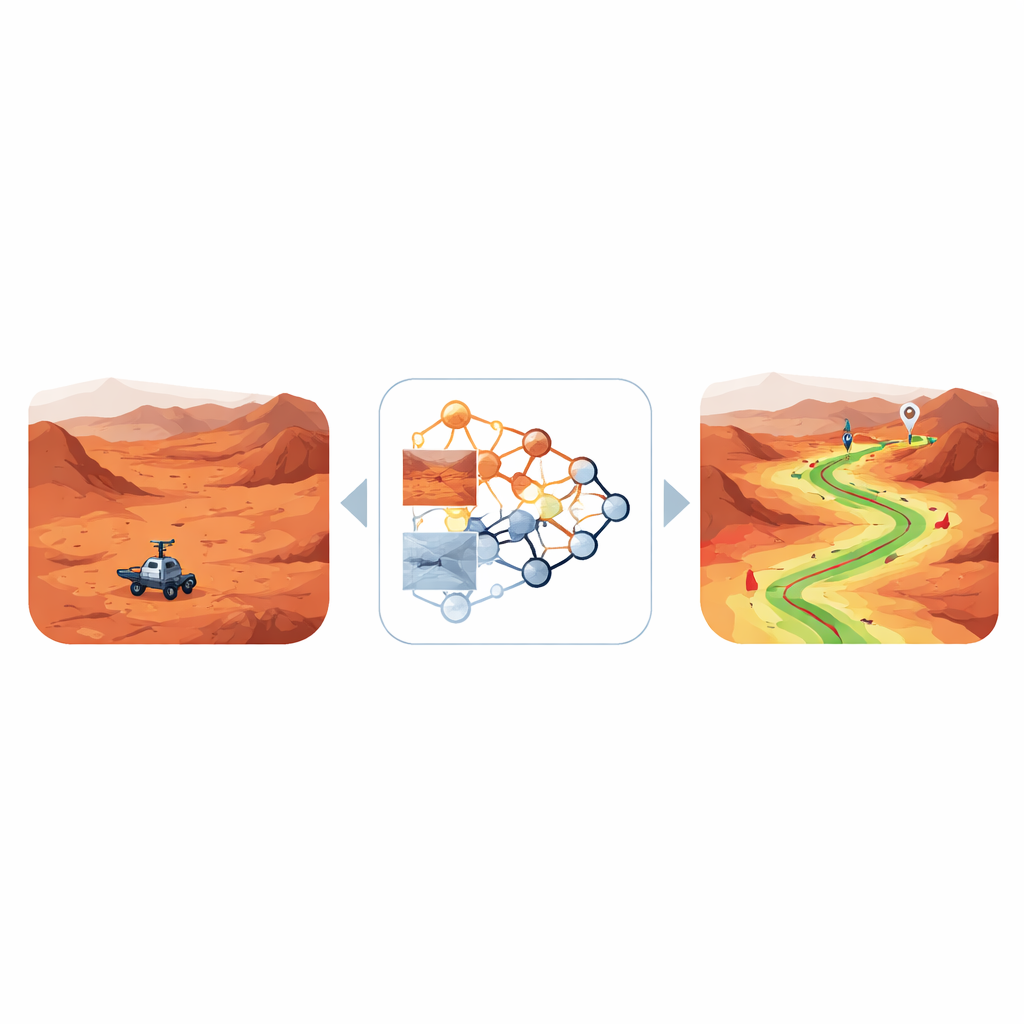
Författarna föreslår en integrerad inlärnings- och planeringsram som de kallar djup probabilistisk körbarhet. Istället för att producera en enda "bästa gissning" av hur mycket hjulen kommer att slira på varje markfläck, förutsäger deras modell en full sannolikhetsfördelning av möjliga slirningar, baserat på färgbilder och lokal lutning. Ett ensemble av djupa neurala nätverk betraktar landskapet uppifrån och, för varje möjlig rörelse på ett rutnät, ger både ett förväntat slirningsvärde och dess osäkerhet. Från denna fördelning översätter systemet slirning till en effektiv körhastighet och slutligen till en resetidskostnad för varje steg. Områden där rovern sannolikt kommer att fastna får mycket höga kostnader; områden där förutsägelsen både är gynnsam och säker får låga kostnader. En standard sökalgoritm hittar därefter en rutt som väger kortaste avstånd mot låg risk för immobilisering.
Låta rovern lära sig under färd
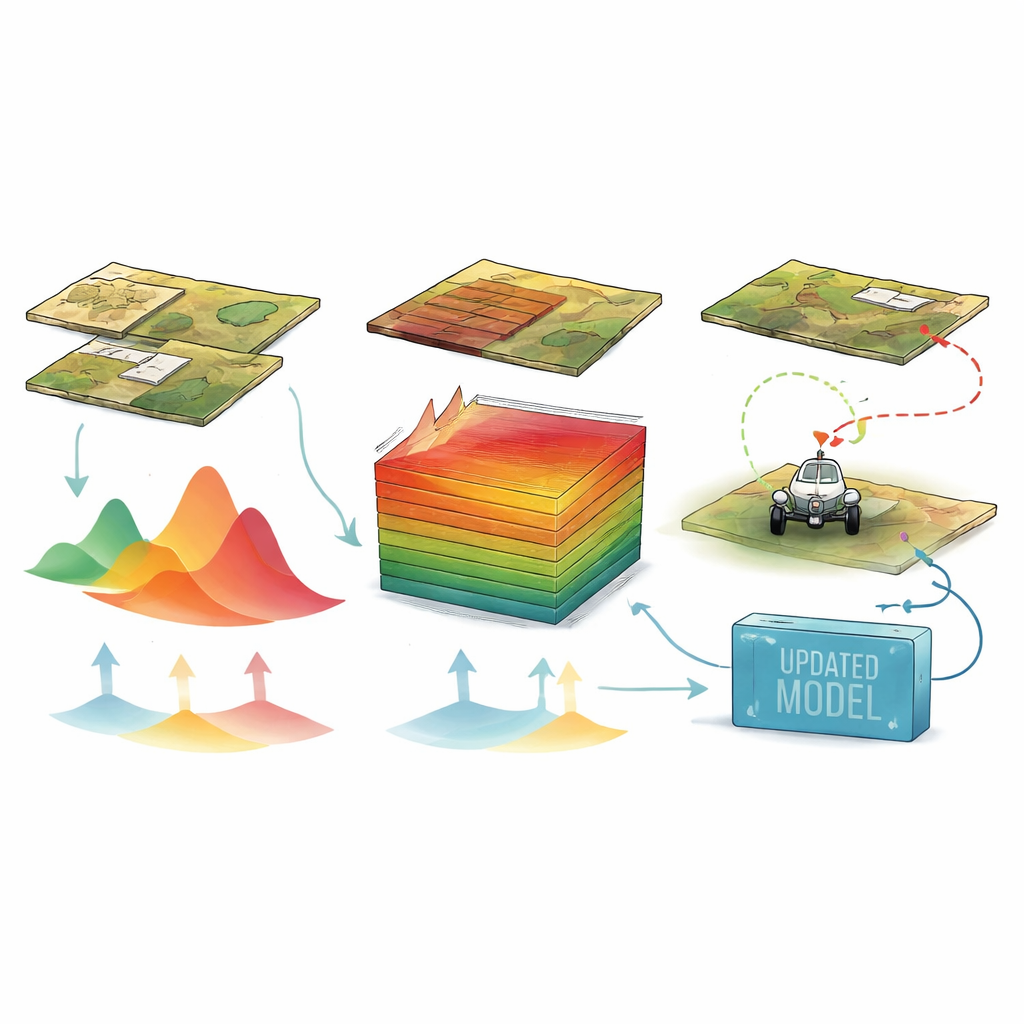
En stor utmaning i planetutforskning är att villkoren en rover möter vid ankomst kan skilja sig avsevärt från dem i dess träningsdata: sluttningar kan vara brantare, jordegenskaper obekanta eller belysningen mycket annorlunda. För att hantera detta innefattar ramen en testtidsanpassningsmekanism. När rovern kör mäter den den faktiska slirning den upplever. Efter varje kort rörelse används dessa färska mätningar för att försiktigt justera tillagda "skal- och förskjutnings"-lager i neurala nätverken samtidigt som de ursprungliga vikterna hålls fasta. Denna strategi låter modellen anpassa sig snabbt till ny terräng med bara ett fåtal observationer, samtidigt som den bevarar vad den redan lärt sig om tidigare sedda förhållanden. Uppdaterade förutsägelser matas sedan tillbaka till omplanering, så att den valda vägen kan förbättras i farten.
Sätta systemet på tuffa prov
Eftersom verkliga roverdata bara täcker begränsade typer av terräng byggde teamet en stor syntetisk datamängd med Marsliknande landskap. De kombinerade datorgenererad grov topografi med tio dolda terrängklasser, var och en med sitt eget färg- och slirningsbeteende, och varierade både lutningens branthet och belysningsriktning för att skapa bekanta och obekanta scenarier. I tusentals simulerade uppdrag jämfördes den nya metoden mot två toppmoderna planerare som antingen ignorerar osäkerhet eller använder den mindre direkt. Under bekanta förhållanden presterade alla tillvägagångssätt likartat. Men i de mest utmanande fallen—mörk belysning och brant kraterlik terräng—nådde den djup probabilistiska körbarheten högre framgångsfrekvenser och lägre maximal slirning, samtidigt som resetiderna förblev konkurrenskraftiga. När adaptiv anpassning i farten var aktiverad minskade systemet ytterligare förutsägelsefel och förbättrade säkerheten, särskilt i miljöer som skilde sig mycket från träningen.
Vad detta betyder för framtida uppdrag
För en allmän läsare är huvudbudskapet att detta arbete ger planetrovrar ett mer försiktigt och självmedvetet sätt att köra på förrädiskt underlag. Istället för att blint lita på en enda förutsägelse om hur deras hjul kommer att greppa, kan rovrar nu väga både förväntat beteende och osäkerhet och välja rutter som är snabba men osannolika att lämna dem strandsatta. Genom att kontinuerligt lära av sin egen slirningserfarenhet kan de anpassa sig till ny sand, sluttningar och belysning utan mänsklig räddning. När rymdorganisationer planerar längre och mer ambitiösa ytopdrag kan sådan osäkerhetsmedveten navigation bidra till att värdefulla robotar spenderar mer tid på att utforska nya vetenskapsmål och mindre tid på att gräva sig ur problem.
Citering: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Nyckelord: navigation för planetrover, terrängens körbarhet, osäkerhetsmedveten planering, maskininlärning i robotik, autonom utforskning