Clear Sky Science · sv
InFoRM: en enhetlig invers och framåtriktad modell för sensomotorisk kontroll
Hur hjärnan kan förenkla rörelse
Varje gång du når efter en kopp eller knackar på ett tangentbord måste din hjärna omvandla en avsikt ("flytta min hand dit") till exakt muskelaktivitet samtidigt som den förutser hur den rörelsen kommer att kännas. Klassiska teorier antar att hjärnan använder två separata interna räknare för detta jobb: en för att generera kommandon till musklerna och en annan för att förutsäga inkommande sensationer. Denna studie utforskar ett djärvt alternativ: att en enda, enhetlig krets skulle kunna hantera båda sidorna av problemet — vilket sparar energi och förbättrar prestanda.
Två sätt att tänka på kontroll
Traditionella modeller för rörelsekontroll föreställer sig ett uppdelat system. En "invers" del omvandlar ett önskat resultat (till exempel fingertippens bana i rummet) till de nödvändiga muskelaktiveringarna, medan en "framåtriktad" del förutser hur kroppen kommer att röra sig och vilket sensoriskt återkoppling som följer. Dessa två delar ritas ofta som separata rutor i läroböcker. Men hjärnavbildning och data från skador stöder inte entydigt en sådan prydlig separation, och vissa hjärnregioner verkar vara involverade i båda rollerna. Dessutom kan det vara metabolt kostsamt att hålla två komplexa kretsar igång. Författarna frågar sig därför om ett flexibelt nätverk skulle kunna lära sig att både producera motoriska kommandon, förutsäga sensorisk återkoppling och till och med härleda det ursprungliga målet enbart från de interna signalerna.
Ett enda nätverk som gör allt
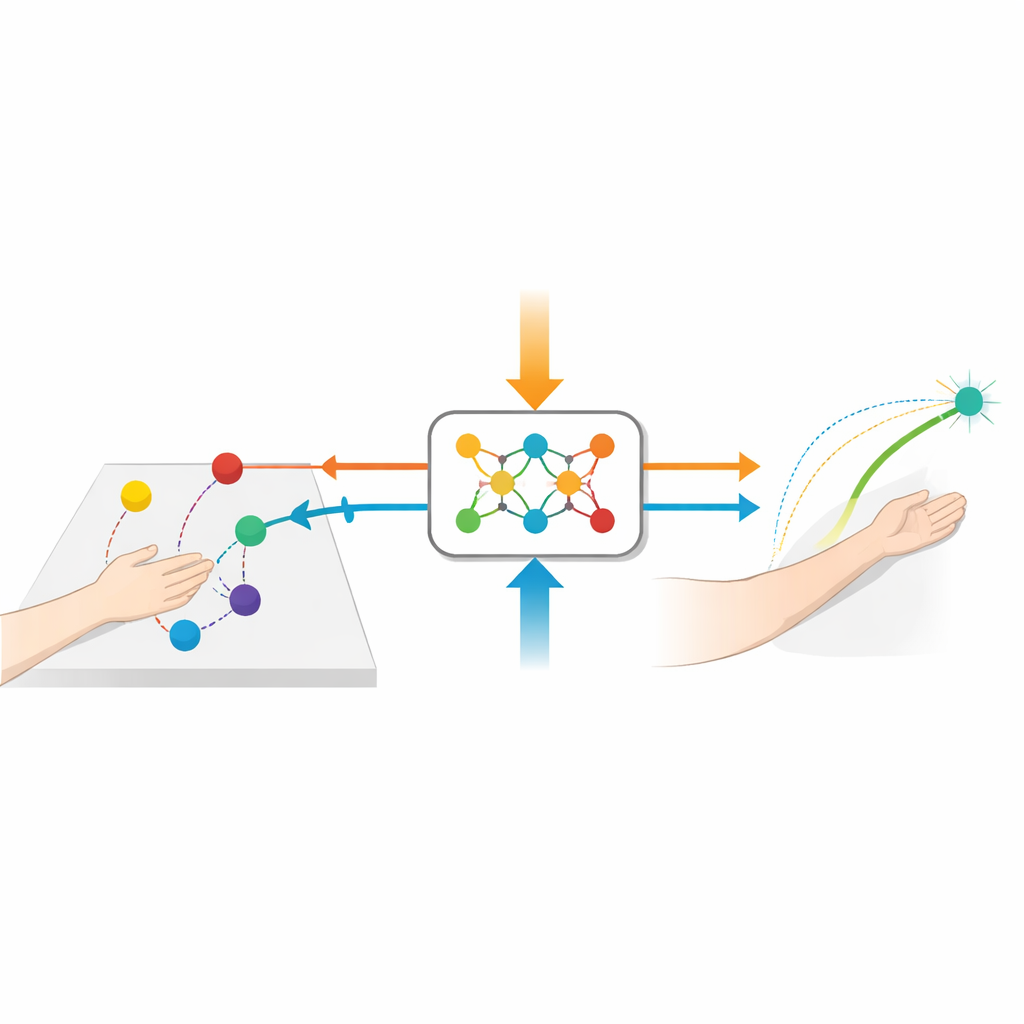
För att pröva idén byggde forskarna en beräkningsmodell kallad InFoRM (kort för inverse–forward–recognition model). Istället för två staplade moduler använder InFoRM ett enda återkommande neuralt nätverk — ett nät av sammankopplade enheter — dit mål-, muskel- och sensoriska signaler alla flödar. Från detta gemensamma "reservoar" av aktivitet tränas tre avläsningar parallellt: en återskapar den önskade handbanan, en genererar de muskelaktiveringar som krävs för att uppnå den, och en förutser de sensoriska signalerna (muskelns längd och hastighet) som skulle följa. Avgörande är att samma interna dynamik stödjer alla tre uppgifter samtidigt, så modellen kan dela information mellan dem i stället för att lära varje uppgift isolerat.
Att testa modellen i verkliga situationer
Teamet spelade in verkliga armrörelser från frivilliga som rytmiskt nådde från en central punkt mot mål placerade i olika riktningar och avstånd på ett bord. Rörelsespårningsdata och en detaljerad muskuloskeletal modell gav, för varje rörelse, fingertippens bana, de uppskattade muskelaktiveringarna och motsvarande sensorikliknande signaler från musklerna. InFoRM tränades på en delmängd av riktningarna och testades sedan i flera utmanande scenarier: att upprepa inlärda rörelser, att producera rörelser i nya mellanliggande riktningar ("morphing" mellan vad den sett) och hantera naturliga, självvalda övergångar mellan mål. För jämförelse byggde författarna också mer klassiska kontrollarkitekturer med separata inversa och framåtriktade nätverk, samt förbättrade varianter som fick extra inmatningsinformation.

Skarpare förutsägelser med färre resurser
I samtliga tester återgav det enhetliga InFoRM-nätverket de inspelade rörelserna och muskelsignalerna mer träget än någon av de separata arkitekturerna. Dess utgångar följde de verkliga signalerna närmare och med mindre fel, även när det ombads interpolera till otränade riktningar eller hantera realistiska, oskriptade målsekvenser. Viktigt är att InFoRM uppnådde denna högre noggrannhet samtidigt som det använde jämförbart eller färre neuron och behövde betydligt färre träningsiterationer, vilket antyder bättre beräkningsmässig effektivitet. Att det också överträffade den bäst förstärkta kontrollmodellen — en som hade tillgång till samma kombination av mål-, motor- och sensorisk information — tyder på att fördelen kommer från att integrera allt i en återkommande krets, inte bara från rikare indata.
Vad detta betyder för förståelsen av hjärnan
Resultaten stöder idén att hjärnan kanske inte upprätthåller skarpt åtskilda "framåtriktade" och "inversa" motorer för rörelse. Istället skulle en enda, rikt sammankopplad krets implicit kunna innehålla båda, där motoriska kommandon och förutsägelser uppstår ur samma underliggande dynamik. Detta perspektiv stämmer väl med moderna synsätt på hjärnan som en prediktiv maskin, ständigt genererande och uppdaterande förväntningar om sin egen kropp och omvärlden. Även om modellen fortfarande är en förenklad abstraktion och biologiska detaljer som nervfördröjningar och föränderliga synapser återstår att utforska, visar InFoRM att en enhetlig design kan vara både kraftfull och ekonomisk, och erbjuder en övertygande alternativ skiss för hur vårt nervsystem kan styra rörelse.
Citering: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Nyckelord: sensomotorisk kontroll, interna modeller, neuronätverk, motorisk inlärning, prediktiv bearbetning