Clear Sky Science · sv
AI-drivna drönare för pollinering av dadelpalmer
Robotar som får dadelpalmer att blomma
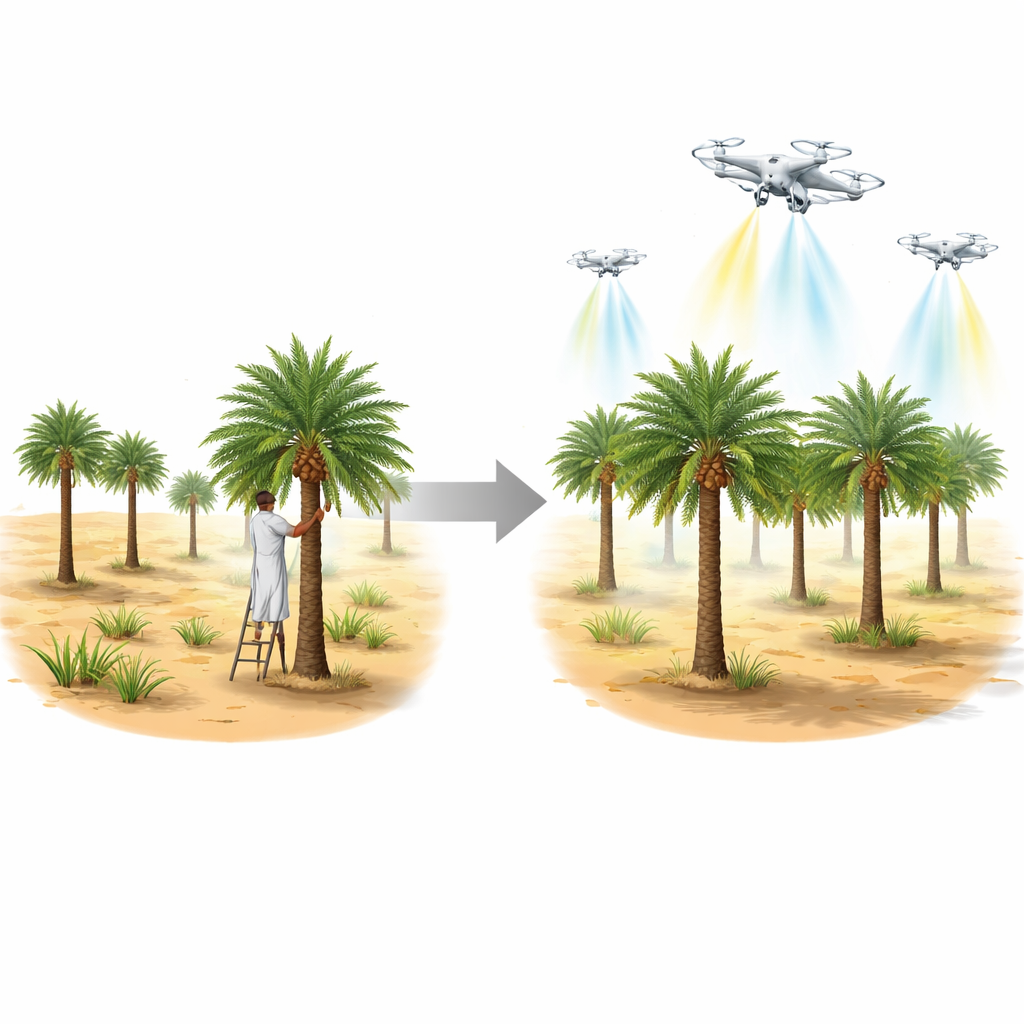
Dadelpalmer är en livlina för många torra områden och förser människor med mat, inkomster och kulturarv. Ändå kräver det fortfarande ett tidskrävande arbete för att varje träd ska bära frukt: arbetare måste klättra höga stammar och fördela pollen för hand på blommorna. Denna artikel undersöker hur små flygande robotar, styrda av artificiell intelligens, skulle kunna ta över stora delar av det arbetet och göra pollineringen snabbare, billigare och mer hållbar för bönderna.
Varför det är så svårt att pollinera dessa träd
Dadelpalmer växer i varma, ofta hårda miljöer och kan nå höjder motsvarande flera våningar. Hannarna och honorna sitter på separata träd, så pollen måste föras över medvetet. Traditionella metoder — att binda mannens blomklasar till honblommor eller att blåsa ut torrt pollen — kräver skicklig arbetskraft, noggrann timing och stora mängder pollen. När gårdarna växer och skickliga arbetare blir svårare att få tag på blir dessa metoder svåra att upprätthålla, särskilt eftersom blomningen sprider sig över veckor och kräver flera besök på samma träd. Klimatförändringar och förlusten av naturliga pollinatörer förvärrar dessutom situationen.
Drönare i fruktlunden
Nyare framsteg inom små flygande farkoster och intelligenta kameror har öppnat för en ny metod: drönarassisterad pollinering. I den här studien utformar och modellerar författarna ett drönarsystem som kan hitta blommande delar på dadelpalmer och spraya dem med en fin dimma av pollensuspension. De studerar två driftlägen. I semi-autonomt läge startar och styr en mänsklig operatör drönaren nära varje träd, medan inbyggd mjukvara upptäcker blommorna och kontrollerar sprayen. I helt autonomt läge följer drönaren en förprogrammerad flygrutt, övervakar batteri och sensorer, undviker hinder, detekterar blommor, positionerar sig, sprutar och flyger tillbaka till basen med liten mänsklig inblandning. Båda angreppssätten syftar till att ersätta timslångt klättrande i träd med minuter av styrd flygning.
Lära drönare att se blommor
För att detta ska vara möjligt måste drönarna kunna ”se” blomklasarna tillräckligt tydligt för att veta var och när de ska pollinera. Forskarna byggde en stor bilddatabas av palmkronor fotograferade under varierande ljusförhållanden, vinklar och växtstadier. Experter ritade sedan rutor kring blomklasarna så att datorseendeprogram kunde lära sig att känna igen dem. Teamet tränade moderna "you only look once" (YOLO)-modeller — snabba djupinlärningssystem som kan hitta objekt i realtid — på denna datamängd. De experimenterade med flera versioner och närliggande modeller, och komprimerade och optimerade sedan de bästa för att köras effektivt på en liten, lågströms datorplatta monterad på drönaren. Efter noggrann fininställning kunde systemet analysera videorutor i mer än tio bilder per sekund samtidigt som det bibehöll tillräcklig detektionsnoggrannhet för att styra precis sprayning.
Utformning av den flygande hjälparen
Parallellt med visionssystemet konstruerade författarna en quadkopterplattform anpassad för arbete i fruktlundar. De beräknade hur mycket dragkraft motorer och propellrar måste generera för att säkert lyfta ramen, batteriet och en liter pollensuspension, samt hur länge drönaren kan vara i luften innan den måste laddas. Med ett typiskt batteri kan testplattformen pollinera omkring sex träd per flygning, där varje träd tar ungefär en minut för drönaren att positionera sig och spraya alla större blomklasar. Studien jämför också olika drönarkonfigurationer — fyra, sex eller åtta rotorer — och belyser kompromisser mellan smidighet, nyttolast, tillförlitlighet och kostnad. För stora gårdar visar författarna att användning av flera drönare parallellt kan minska den totala tiden för att pollinera tusen träd från många timmar med en enda maskin till bara ett par timmar med en liten flotta.
Spara arbetskraft, pollen och miljö
En viktig fördel med systemet är hur det använder pollen. Istället för att duscha träd med tjocka, pulverformiga moln applicerar drönaren en utspädd flytande suspension direkt där den behövs. Enligt författarnas beräkningar och jämförelser med befintliga kommersiella system kan deras design minska pollenanvändningen med cirka 97 procent per träd samtidigt som effekten förväntas vara likvärdig. Samtidigt uppskattar de att arbetskraftsbehovet minskar med ungefär 80 procent, eftersom en operatör och ett litet antal drönare kan ersätta en större grupp klättrare. Samma plattform kan också anpassas för precis leverans av gödsel eller växtskyddsmedel, vilket minskar kemiskt spill och avrinning.
Vad detta innebär för bönder
Arbetet bevisar ännu inte hur mycket mer frukt bönder kommer att få, eftersom studien fokuserar på ingenjörsprestanda snarare än långtidsdata om skörd. Resultaten visar dock att AI-styrda drönare pålitligt kan hitta dadelblommor, nå dem med en mild spray och göra det med avsevärt mindre arbetskraft och pollen än traditionella metoder. Enkelt uttryckt antyder denna prototyp att framtida gårdar skulle kunna förlita sig på små flottor av intelligenta flygande hjälpare för att sköta ett av sina mest krävande säsongsarbeten, vilket befriar människor från riskfyllda klättringar samtidigt som det bidrar till mer säkra skördar i några av världens torraste regioner.
Citering: AlRaeesi, I., El-Khazali, R. AI-enabled drones for date palm pollination. Sci Rep 16, 10158 (2026). https://doi.org/10.1038/s41598-026-39739-2
Nyckelord: drönarpollinering, dadelpalmodling, precisionsjordbruk, jordbruksrobotik, datorseende