Clear Sky Science · sv
Minskning av mätbrus i modifierad Smith-prediktor och automatiska offset-styrenheter för system med integrator och dödtid
Varför detta är viktigt för vardagsteknik
Många enheter vi litar på — från kemiska anläggningar och kraftsystem till bilar och små laboratorieuppställningar — måste reagera på sensormätningar som kommer fördröjda och är förorenade av brus. Denna artikel ställer en enkel men avgörande fråga: när signaler är fördröjda och brusiga, vilken typ av automatisk styrenhet håller systemet stabilt, exakt och skonsamt mot utrustningen? Författarna jämför en populär prediktionsbaserad metod med en nyare ansats som aktivt uppskattar och tar bort störningar, och visar varför den ena är mycket mer pålitlig i verkligt stökiga miljöer.
Fördröjda reaktioner och skakiga sensorvärden
I många processer påverkar inte en ändring av en insignal (som värmareffekt eller ventilposition) omedelbart utsignalen. Det finns en inbyggd fördröjning medan värme sprids, kemikalier blandas eller mekaniska delar rör sig. Ingenjörer beskriver ofta sådana system som en «integrator plus dödtid»: utsignalen fortsätter ackumulera insignalens effekt, men först efter en väntperiod. Samtidigt innehåller sensorer som mäter temperatur, flöde eller position alltid något slumpmässigt brus. En styrenhet måste därför styra ett system vars respons både är fördröjd och observerad genom en skakig lins. Om detta görs dåligt kan styrsignalen svänga våldsamt, slita ut ställdon och ändå misslyckas med att nå önskat värde.
Gammal prediktor mot ny offset-borttagare
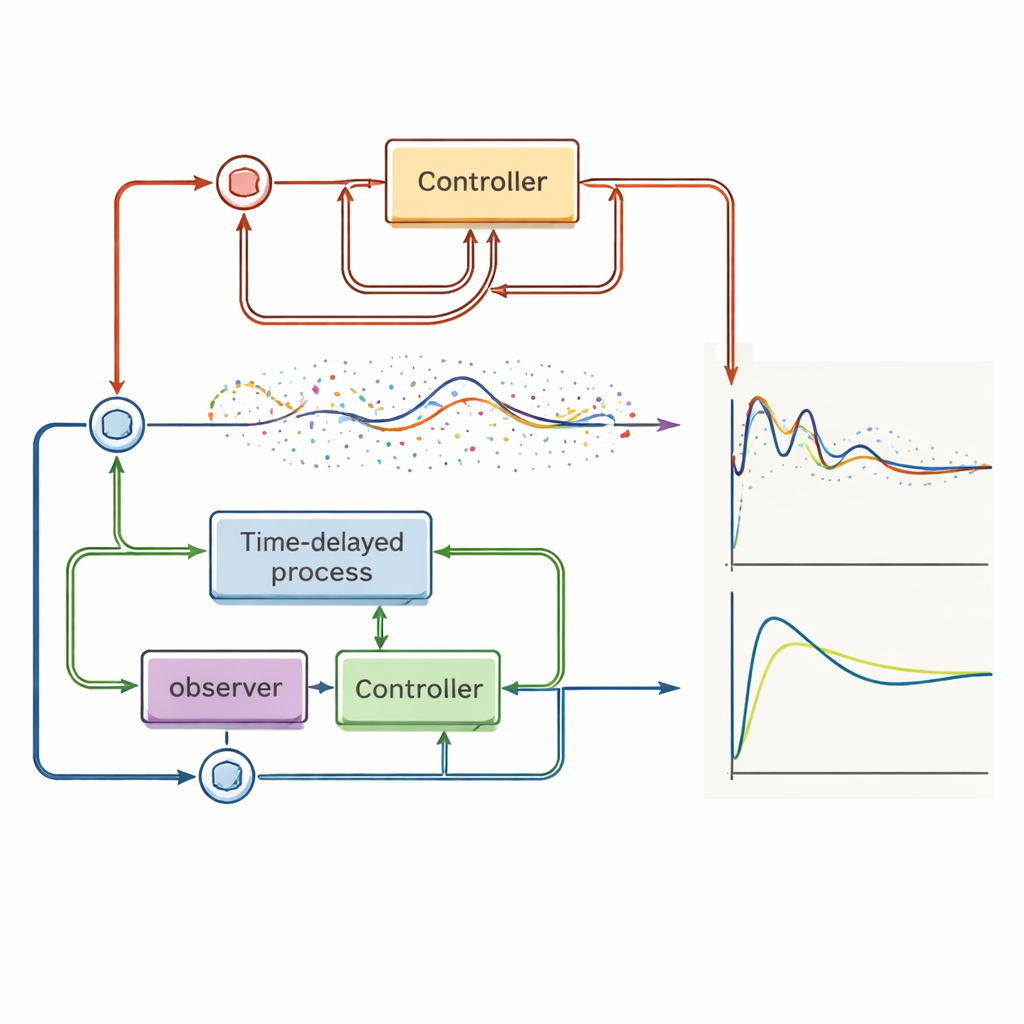
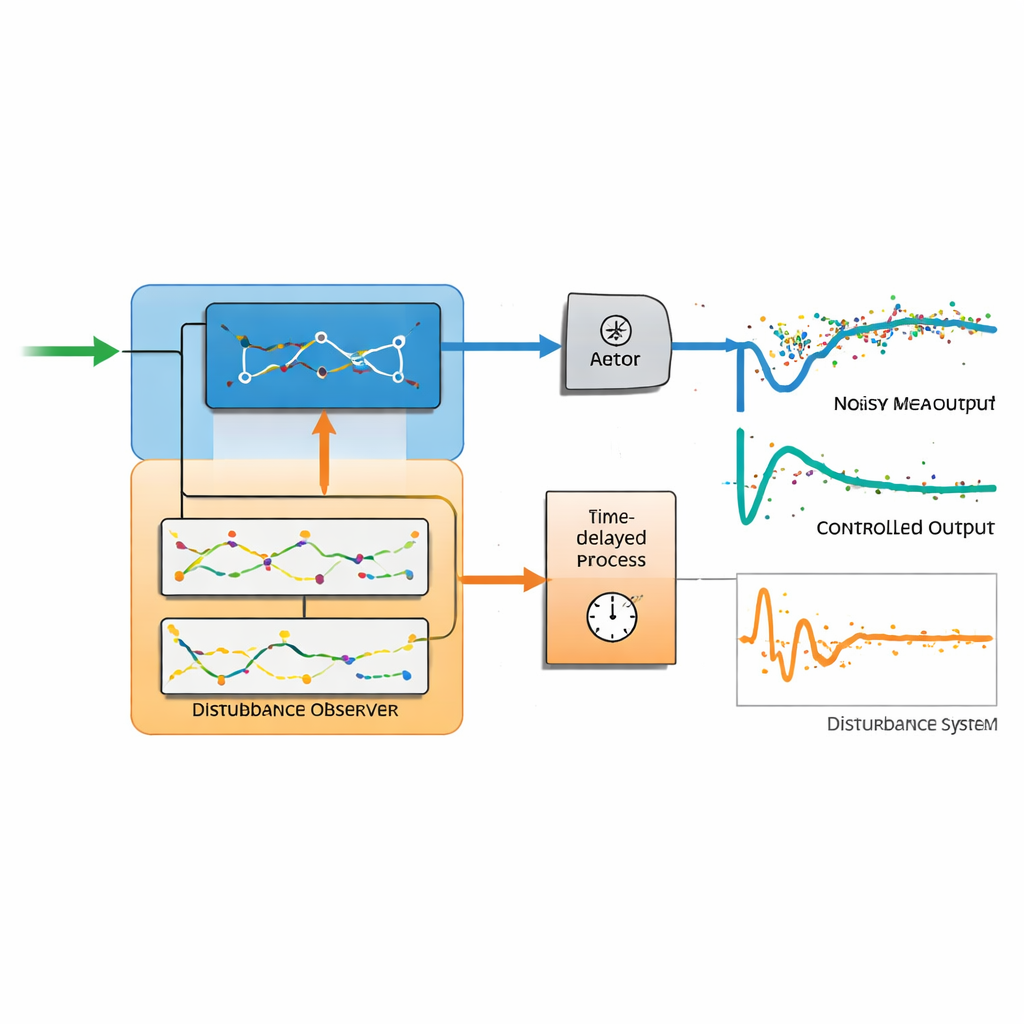
Den klassiska Smith-prediktorn och dess moderna variant, Åström–Smith-prediktorn, hanterar fördröjning genom att bygga en intern modell av processen och använda den för att förutsäga framtida utsignal. Under idealiska förhållanden kan detta ge snabba, skarpa svar. Den konkurrerande designen som undersöks här, kallad automatisk offset-styrenhet, tar en annan väg. Den kombinerar en vanlig stabiliserande regulator med en störningsobserver — en modul som sluter sig till de dolda störningar som verkar på insignalen och automatiskt avbryter dem. Den viktiga skillnaden är att denna observer använder en fullständig intern modell av det fördröjda systemet, tillsammans med noggrant utformade lågpassfilter och, vid behov, högre ordningens derivator av utsignalen. Denna struktur låter ingenjörer ställa in hur snabbt störningar rekonstrueras utan att rubba hur systemet följer ett önskat referensvärde.
Vad som händer när bruset är verkligt, inte idealiskt
När författarna lägger in realistiskt mätbrus i simuleringar och experiment blir skillnaden mellan de två angreppssätten tydlig. Den prediktorbaserade styrenheten, som förlitar sig på flera marginellt stabila integratorblock, blir extremt känslig för brus. Även för brusnivåer så låga som omkring en procent av signalen exploderar styrinsatsen — hundratals till tusentals gånger större än med den automatiska offset-styrenheten — och ställdonsignalen blir våldsamt skakig. Värre är att prediktorn inte längre kan garantera att utsignalen slutligen matchar referensvärdet: bestående offsetter och till och med instabilitet uppträder, särskilt när ställdonen når sina mättnadgränser. Däremot bibehåller den automatiska offset-styrenheten jämna styrsignaler, avvisar effektivt konstanta störningar och håller utsignalen nära målvärdet tack vare sin filtrering och störningsuppskattningsstruktur.
Sätter metoderna på praktiska prov
Artikeln stannar inte vid abstrakta modeller. Författarna applicerar båda regulatorerna på en instabil kemisk reaktor som approximeras av en enkel fördröjningsdominerad modell, och på en verklig termisk labbuppställning byggd kring en lampa, en temperatursensor och en kylfläkt. I det instabila fallet fungerar den automatiska offset-styrenheten fortfarande tillförlitligt, även om dess inställningar måste göras mjukare för att undvika översvängning, medan den prediktorbaserade metoden lider av växande fel när bruset intensifieras. På den termiska anläggningen ger den automatiska offset-styrenheten nära tidsoptimala svar som är mjuka både i temperatur och styrinsats, även när fläkten introducerar plötsliga förändringar. Den prediktorbaserade styrningen, däremot, visar synliga kvarstående fel och märkbart långsammare, mindre pålitligt beteende när realistiskt brus och ställdonsbegränsningar är närvarande.
Vad detta betyder för framtida styrsystem
Ur ett lekmannaperspektiv är slutsatsen klar: en styrenhet som enbart förutsäger framtiden baserat på en ideal modell kan se imponerande ut på papper, men uppträda illa när verkligt brus och begränsningar visas. Den automatiska offset-styrenheten, med sin inbyggda störningsobserver och noggrant filtrerade interna modell, visar sig vara mer robust, mer exakt och lättare att ställa in över ett brett spektrum av fördröjda processer. Författarna drar slutsatsen att medan en modifierad Smith-prediktor fortfarande kan vara användbar i nischade, lågbrosituationer, är en störningsobserver-baserad design ett enklare och mer pålitligt standardval för moderna styrsystem där sensorer är ofullkomliga och stabilitet verkligen spelar roll.
Citering: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
Nyckelord: tidsfördröjningsstyrning, störningsobserver, mätningsbrus, automatisk offset-styrenhet, Smith-prediktor