Clear Sky Science · sv
Kalibrering av fysikaliska och mekaniska egenskapsparametrar för broccoliplantstjälkar
Varför varsam hantering av unga plantor är viktig
Fabriksartad odling förlitar sig i allt större utsträckning på maskiner för att sätta grödor, men känsliga plantor får ofta betala priset. För broccoli kan skadade eller krossade stjälkar vid utplantering hämma tillväxten, minska skörden eller till och med döda plantan. Denna studie undersöker hur man kan förutse och förebygga sådan skada genom att bygga en detaljerad digital modell av en broccolistjälk, vilket låter ingenjörer testa klämmor på en datorskärm innan de någonsin rör vid en verklig planta. 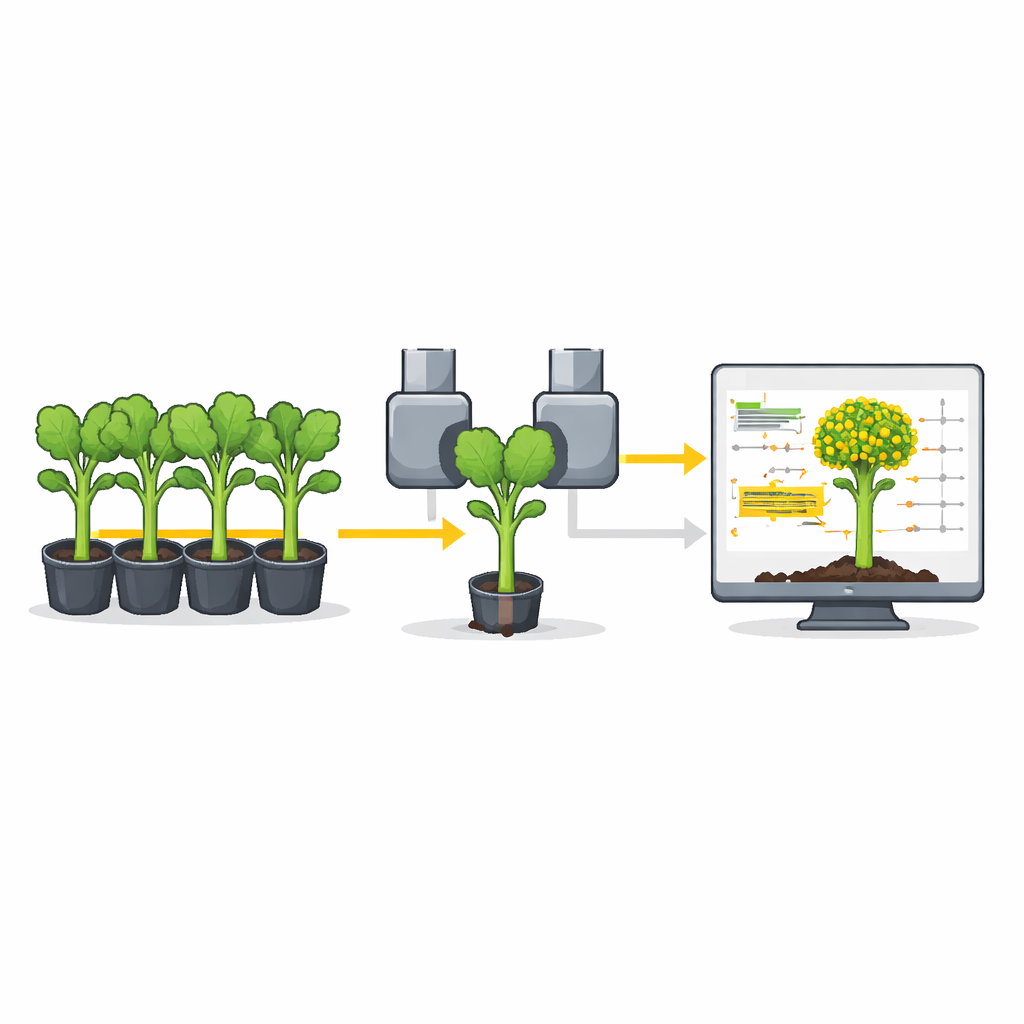
Känsliga stjälkar möter hård metall
Broccoliplantor ser robusta ut, men deras saftiga stjälkar liknar mer mjuka sugrör än träpinnar. När mekaniska gripdon klämmer åt dessa stjälkar för att lyfta och placera plantor är för litet tryck att plantan glider; för mycket och stjälken krossas eller bryts av. För att förbättra denna balans mätte forskarna först hur verkliga stjälkar beter sig vid tryckning, skjuvning, glidning och stötar. De testade hundratals unga ’Yanxiu’-broccoliplantor odlade under kontrollerad temperatur och fuktighet och registrerade noggrant deras styvhet, densitet, sidobulning, friktion mot stål och hur de deformeras eller går sönder under belastning.
Att förvandla en stjälk till tusentals små bitar
I stället för att behandla varje stjälk som en solid stav använde teamet den diskreta elementmetoden, ett simuleringssätt som representerar materia som en samling många små partiklar. I deras datormodell byggs varje broccolistjälk upp av nästan 3 000 små sfärer bundna ihop, lite som en kolumn av tätt limmade pärlor. Dessa bindningar ger den virtuella stjälken styrka, medan kontaktregler mellan sfärerna och mot metallkontakter styr hur de glider, rullar och studsar. Genom att finjustera dessa egenskaper kan den digitala stjälken göras att böjas, skjuvas och komprimeras nästan som den verkliga.
Kalibrering av den virtuella stjälken
För att försäkra sig om att modellen betedde sig realistiskt använde författarna en stegvis kalibreringsprocess. Först skapade de små högar av avklippta stjälksegment och mätte vinkeln vid vilken högen naturligt vilade, en enkel men känslig indikator på friktionen mellan delarna. De körde sedan virtuella hopningsprov och justerade friktions- och studsinställningar tills den simulerade högen matchade den verkliga inom cirka en halv grad. Därefter fokuserade de på styrkan i de interna bindningarna genom att klippa stjälkar med en mekanisk provare och mäta toppkraften precis innan brott, för att sedan upprepa samma åtgärd i simuleringen. Med hjälp av statistiska designverktyg sökte de efter kombinationen av bindningsstyvhet, hållfasthet och storlek som återgav det observerade genomsnittliga skjuvningskraftsvärdet på ungefär 31 newton med mindre än 1 % fel. 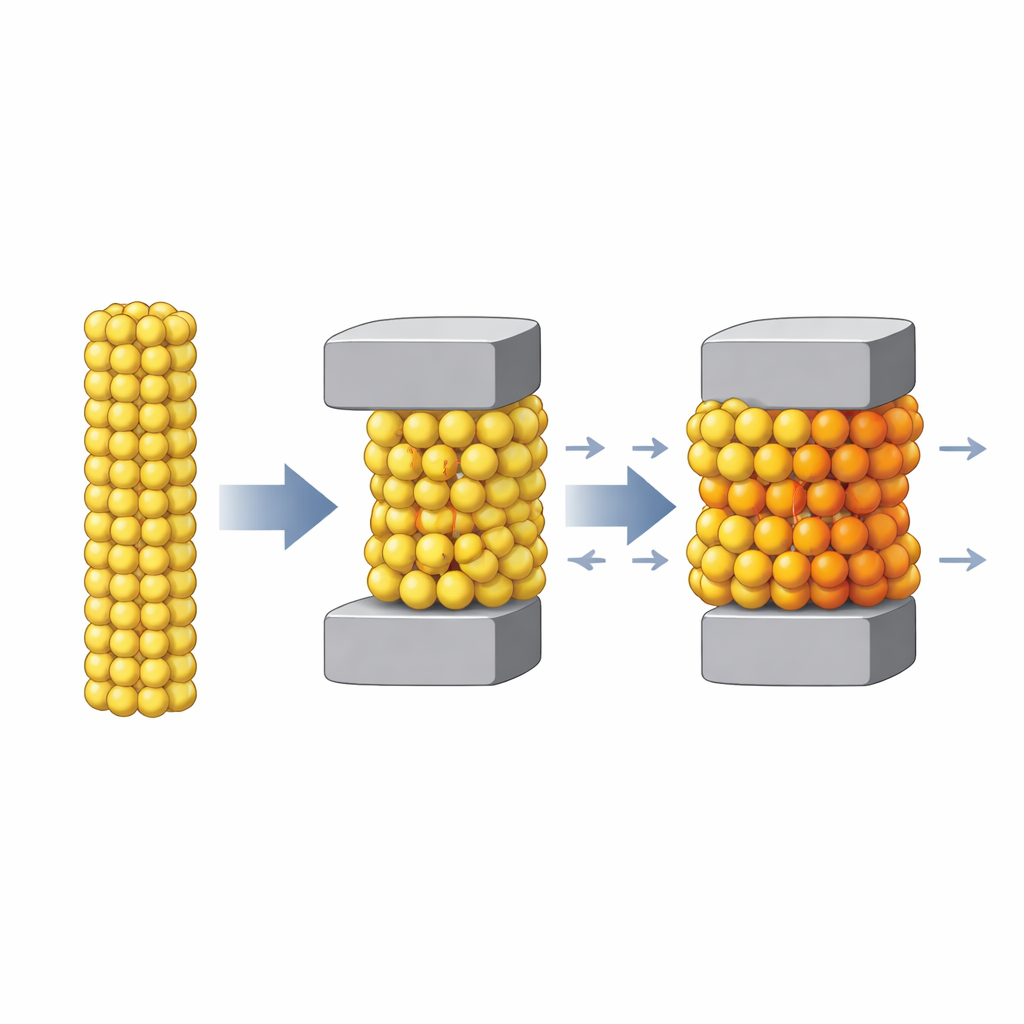
Användning av modellen för klämning
Med den digitala stjälken kalibrerad simulerade teamet vad som faktiskt händer i en utplanterare: ett par käftar klämmer stjälken och håller den i flera sekunder. De jämförde datorns förutsagda deformation med verkliga mätningar vid tre praktiska kraftnivåer—10, 15 och 20 newton. Skillnaderna höll sig under cirka 12 %, väl inom det intervall som vanligtvis accepteras för biologiska material. Simulationerna visualiserade också hur kompression och interna spänningar byggs upp när kraften ökar, vilket tydliggör när stjälkar enbart böjs jämfört med när de riskerar permanent skada eller brott.
Vad detta betyder för smartare jordbruksmaskiner
För icke-specialister är huvudpoängen att detta arbete förvandlar sköra broccolistjälkar till ett tillförlitligt digitalt testobjekt. Konstruktionstekniker för utplanteringsmaskiner kan nu utforska käfternas former, ytmaterial och kraftinställningar i en virtuell miljö, vilket kraftigt minskar trial-and-error på verkliga plantor. Den kalibrerade modellen är anpassad till den specifika broccolisorten, fuktnivån, stjälkdiametern och det kraftområde som testades, så den måste ställas om för andra förhållanden. Ändå erbjuder arbetsflödet—noggranna mätningar, partikelbaserad modellering och statistisk optimering—a en mall för att skydda många typer av känsliga plantor i takt med att jordbruket rör sig mot mer automation.
Citering: Qin, L., Gong, Y., Zhang, K. et al. Calibration of physical and mechanical property parameters of broccoli seedling stalks. Sci Rep 16, 8008 (2026). https://doi.org/10.1038/s41598-026-39286-w
Nyckelord: broccoliplantor, mekaniserad utplantering, växtstjälkars mekanik, diskret elementmodellering, jordbruksrobotik