Clear Sky Science · sv
Sekventiell modellprediktiv direkt snabbhetsstyrning av PMSM
Smartare styrning för vardagliga elmotorer
Elmotorer driver diskret fabrikslinjer, pumpar, robotar och även vissa hushållsapparater. Att få dessa motorer att gå effektivt och mjukt sparar energi, minskar brus och slitage samt förbättrar driftsäkerheten. Denna artikel undersöker ett nytt sätt att styra en populär motortyp så att den reagerar snabbt på förändringar utan att bli instabil eller skapa överdriven elektrisk ”brus”. Författarna fokuserar på en strategi som lovar enklare inställning för ingenjörer samtidigt som den levererar snabb och noggrann hastighetsreglering.
Varför dagens motorstyrningar är svåra att ställa in
Synkronmotorer med permanentmagnet används i stor utsträckning eftersom de är kompakta, effektiva och kan ge exakt hastighetsreglering. Traditionella styrscheman förlitar sig på flera inbäddade slingor och en uppsättning inställningsreglage som ingenjörer måste justera genom försök och misstag. Nyare metoder baserade på prediktiv styrning försöker välja den bästa åtgärden för motorn en bråkdel av en sekund in i framtiden, förbättra reaktionstiden och låta flera mål (såsom noggrann hastighet och låg strömförbrukning) hanteras samtidigt. Dessa prediktiva regulatorer sammanför dock vanligtvis alla mål i ett stort matematiskt uttryck som beror på flera ”viktfaktorer”. Att välja dessa vikter är ökänd för att vara svårt: ett bra val kan ge utmärkt prestanda, medan ett dåligt kan göra systemet trögt eller till och med instabilt.
En steg‑för‑steg‑metod för att fatta beslut
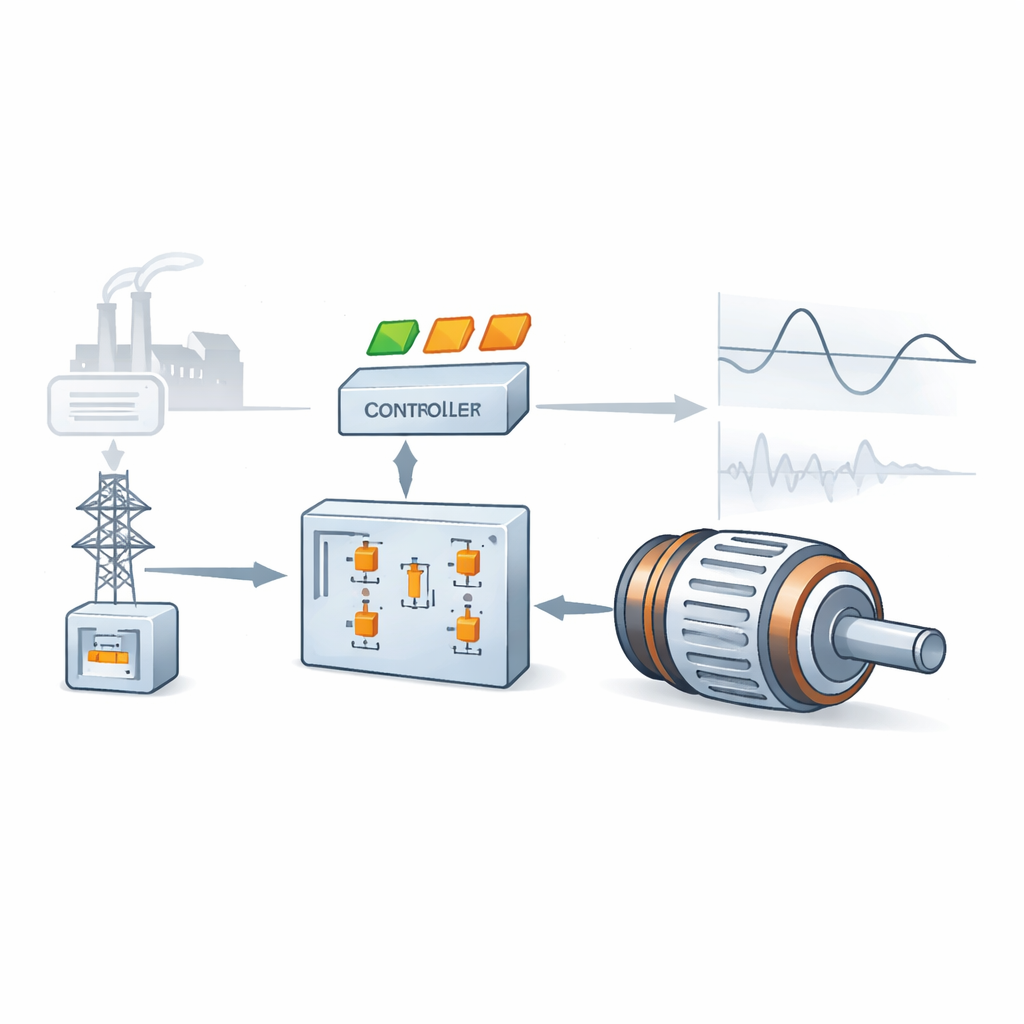
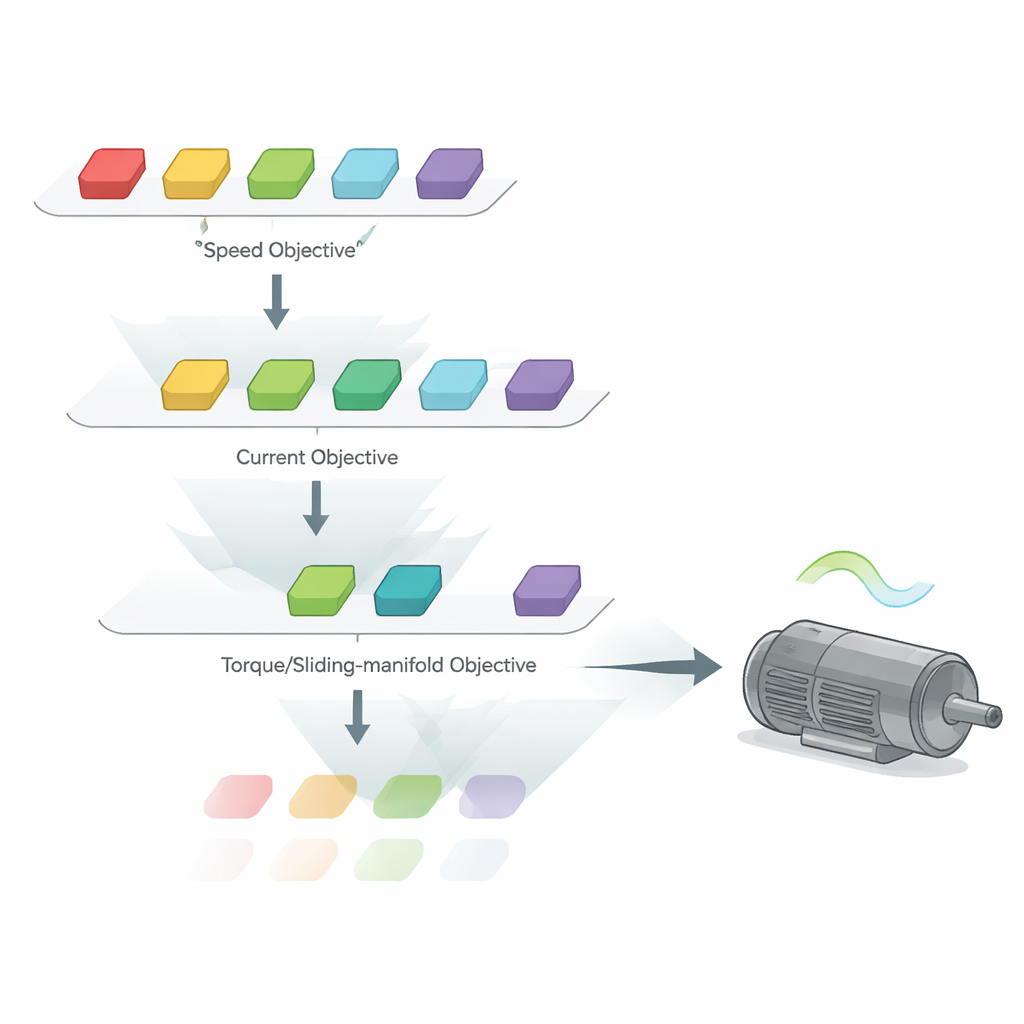
I stället för att packa alla mål i en komplicerad formel studerar författarna en ”sekventiell” metod. Här förutspår regulatorn fortfarande hur motorn kommer att bete sig för varje möjlig växlarställning i kraftelektroniken, men den utvärderar separata, enklare mål ett efter ett. Först elimineras de växlaralternativ som skulle ge dåligt hastighetsbeteende. Därefter, bland de återstående alternativen, behålls endast de som använder strömmen effektivt. Slutligen väljs det alternativ som bäst formar motorns vridmoment, med hjälp av en speciell glidregel som kopplar samman hastighetsfel och vridmomentsfel så att motorhastigheten konvergerar snabbare. Eftersom varje steg fokuserar på ett enda mål behövs ingen jonglering med flera viktfaktorer; i stället använder regulatorn en logisk elimineringsprocess. En tillhörande observatör uppskattar det okända lastvridmomentet på axeln så att prognoserna förblir korrekta även när motorn störs.
Förbättrad stabilitet med en förfinad konstruktion
När författarna först testade denna sekventiella metod fann de att även om den svarade snabbt på hastighetsförändringar kunde den bli instabil och ge stora fluktuationer i motorns ström, särskilt när de försökte tvinga den att reagera snabbare. För att avhjälpa detta föreslog de en förbättrad version som lägger till en genomtänkt nyans i det första beslutssteget: den tittar inte bara på den förutsagda hastigheten utan bestraffar också varsamt vissa strömkomponenter, och den skalar denna bestraffning med den begärda hastigheten. Vid låga hastigheter fokuserar regulatorn mer på att hålla strömmarna lugna; vid högre hastigheter tillåts kraftigare åtgärder för att bibehålla prestandan. Denna ändring gör det möjligt att använda en mer aggressiv glidregel för vridmoment utan att utlösa instabilitet. I detaljerade datorsimuleringar matchade den förbättrade metoden uppgångstiden hos en välinställd konventionell prediktiv regulator och gav liknande nivåer av elektrisk distorsion, allt med färre inställningsparametrar.
Att prova metoden i labbet
Gruppen implementerade sedan både den ursprungliga och den förbättrade sekventiella regulatorn på en verklig 1,1‑kilowattars motordrivning med hjälp av en snabbrumprototypplattform. De jämförde dem med en standard prediktiv regulator under realistiska förhållanden, inklusive snabba hastighetsramper, plötslig belastning och till och med hastighetsomkastning. Den ursprungliga sekventiella regulatorn kunde reglera hastigheten men visade då och då förlust av stabilitet och kraftiga strömfluktuationer, särskilt vid högre hastigheter. I kontrast körde den förbättrade versionen stabilt över det testade området. Genom att justera en enda nyckelparameter som formar glidregeln kunde forskarna växla mellan tajtare hastighetsspårning och mjukare strömvågmönster. Mellaninställningar gav en praktisk balans: hastighetsfelen minskade avsevärt jämfört med konservativa inställningar, samtidigt som ökningen i strömdistorsion förblev acceptabel.
Vad detta betyder för verkliga drivsystem
För icke‑specialister är huvudbudskapet att författarna har visat upp ett enklare men ändå kraftfullt sätt att styra högpresterande elmotorer. Deras förbättrade sekventiella strategi tar bort mycket av gissningsarbetet som ingår i att ställa in traditionella prediktiva regulatorer, samtidigt som snabba reaktioner på hastighetsförändringar och störningar bevaras. Metoden är inte perfekt — strömvågformerna är fortfarande något bullrigare än idealiskt, särskilt vid mycket krävande inställningar — men den utgör ett viktigt steg mot mer robusta, lättidrifttagna motordrivsystem. Framtida arbete kommer att fokusera på att minska dessa strömdistorsioner och ytterligare analysera stabiliteten, med målet att göra denna typ av smart, sekventiell styrning lämplig för större, mer strikt reglerade industrisystem.
Citering: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Nyckelord: synkronmotor med permanentmagnet, modellprediktiv styrning, motorhastighetsreglering, sekventiell styrning, kraftelektroniska drivsystem