Clear Sky Science · sv
Forskning om intelligent igenkänningsmetod för maskindelar med hög funktionslikhet i industriell miljö
Varför det spelar roll att hitta liknande delar
Moderna fabriker är beroende av robotar som hittar, plockar upp och monterar tusentals små metalldelar. Många av dessa komponenter — växlar, lager, drev, muttrar och skruvar — ser förvillande lika ut, särskilt under svår belysning eller när de ligger överlappande på ett transportband. Om en robot misstar en del för en annan kan det leda till stopp, defekter eller till och med skadade maskiner. Denna studie tar sig an en till synes enkel fråga med stora industriella konsekvenser: hur kan ett kompakt, snabbt visionssystem pålitligt skilja nästan identiska delar åt i verkliga verkstadsvillkor?
Utmaningar för vision i fabriksrummet
På ett fabriksgolv får kameror sällan de rena vyerna som visas i demonstrationsvideor. Belysningen är ojämn, vilket orsakar starka reflexer på blank metall och djupa skuggor på andra områden. Delar hälls i lådor eller ligger utspridda på band och döljer ofta delar av varandra. För att göra saken värre delar många metallkomponenter liknande former, färger och ytor, vilket lämnar få uppenbara visuella ledtrådar. Traditionell programvara som matchar mallar eller handkonstruerade kännetecken har stora svårigheter under dessa förhållanden: den är långsam, bräcklig vid skiftande ljus och misslyckas ofta när delar överlappar eller roteras på oväntade sätt.
Bygger på snabba enskottsdetektorer
Under de senaste åren har en familj av artificiella intelligensmodeller kallad YOLO (You Only Look Once) blivit populär för att detektera objekt i bilder i ett enda, snabbt svep. YOLOv8, en av de senaste versionerna, balanserar redan noggrannhet och hastighet väl och kan köras i realtid. Men när olika delar ser nästan likadana ut kan även YOLOv8 missa subtila ledtrådar eller rita oexakta rutor. Tidigare försök att krympa YOLO‑modeller för små enheter tenderade att skära ner parametrar men försvagade också förmågan att representera fina detaljer — precis det som behövs för att skilja liknande maskindelar åt.
Ett slankare men skarpare detektionsnätverk
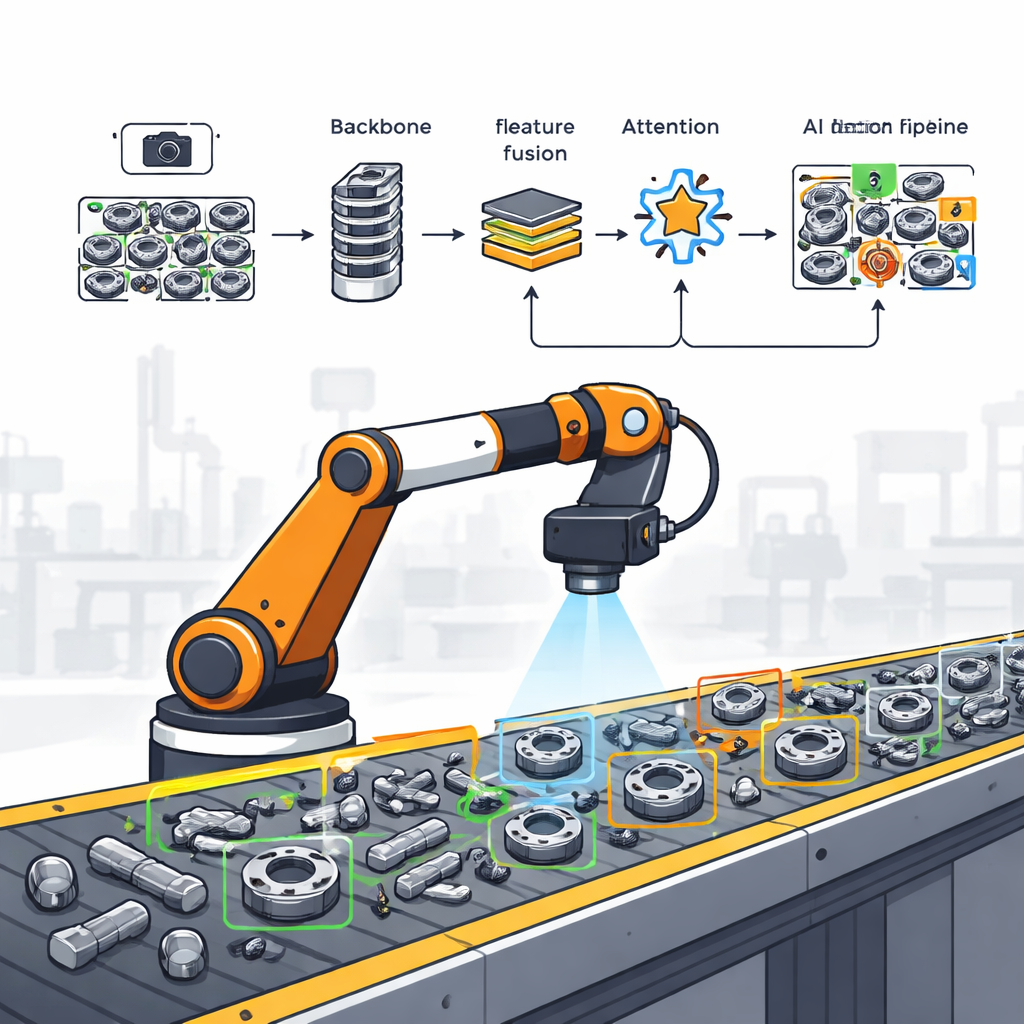
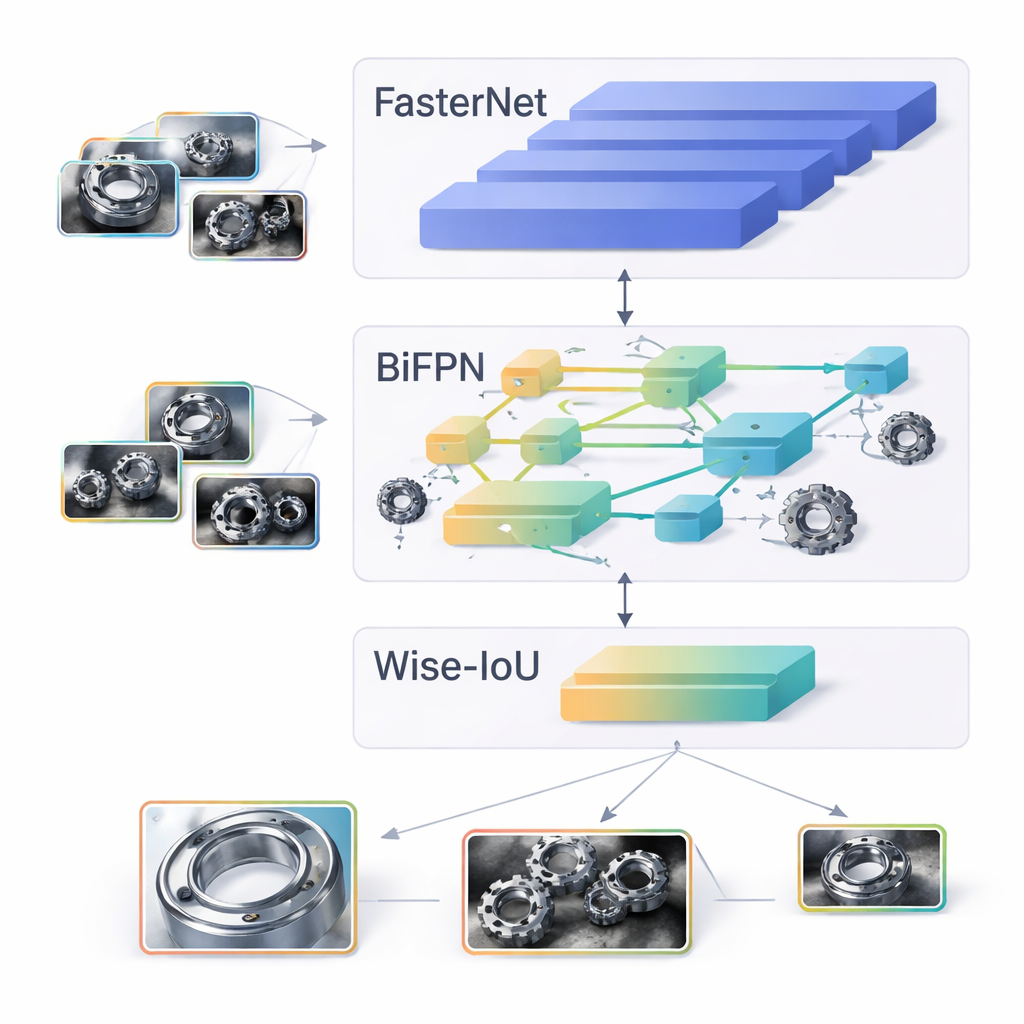
Författarna föreslår en uppgraderad version av den minsta YOLOv8‑modellen, kallad YOLOv8n, särskilt anpassad för förvirrande industriella delar och för hårdvara med begränsad beräkningskraft. Först byter de ut nätverkets standardkärna mot en nyare design kallad FasterNet, som använder en ”partial” konvolutionstrick för att arbeta endast på de mest användbara regionerna i bilden vid varje steg. Detta minskar upprepat arbete i minnet utan att förlora viktig visuell information. För det andra omformar de nätverkets mittdel, den så kallade ”neck”, för att använda ett bidirektionellt feature‑pyramid (BiFPN), vilket låter information flöda både från grova, globala vyer ner till fina detaljer och från fina detaljer uppåt, så att små, delvis dolda delar gynnas av kontext och vice versa.
Lär nätverket att ignorera dåliga ledtrådar
Utöver nätverkets struktur påverkar hur det lär sig att justera sina inre inställningar — styrt av en förlustfunktion — starkt vad det uppmärksammar. Standardträning behandlar alla exempel mer eller mindre likvärdigt, vilket innebär att lågkvalitativa träningsboxar (dåligt inriktade eller tvetydiga) kan vilseleda modellen. Författarna ersätter den vanliga regeln för boxmatchning med en metod kallad Wise‑IoU. I enkla termer poängsätter detta tillvägagångssätt varje träningsexempel inte bara efter överlappning utan också efter hur mycket det avviker, och minskar sedan diskret inflytandet från de opålitliga exemplen. Över tid lär sig systemet främst från klara, välmärkta delar, vilket leder till tajtare och mer tillförlitliga detektionsrutor, särskilt när delar överlappar eller visas i svår belysning.
Sätter systemet på prov
För att utvärdera sin design byggde teamet sin egen bildsamling av sex vanliga maskindelar, var och en fotograferad 1 250 gånger under olika ljusnivåer och med varierande grad av ömsesidig täckning. De jämförde sin förbättrade modell med standard‑YOLOv8n och flera andra lättviktsdetektorer. Det nya systemet uppnådde högre total detektionskvalitet samtidigt som det använde mindre än två tredjedelar av beräkningen och minskade antalet parametrar med cirka 42 %. Särskilt höjde det en nyckelmetrik kallad mean average precision vid en vanligt använd tröskel med 1,5 procentenheter, samtidigt som det fortfarande kördes effektivt nog för realtidsbruk på modest hårdvara.
Vad detta betyder för smarta fabriker
I praktiska termer visar studien att fabriksrobotar kan bli både smartare och mer resurssnåla. Med omdesignad nätkärna, smartare funktionsfusion och en mer selektiv inlärningsregel kan en liten AI‑modell på ett mer tillförlitligt sätt skilja mellan liknande växlar, lager och andra delar i röriga, verkliga scener, även när belysningen är dålig och delarna överlappar. Denna kombination av högre noggrannhet och lägre beräkningskrav gör det enklare att distribuera robust vision på lågkostnads‑edgeenheter, vilket banar väg för mer flexibla, fullt automatiserade produktionslinjer utan behov av massiva servrar eller perfekt kontrollerade miljöer.
Citering: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Nyckelord: industriell objektigenkänning, maskindelar, lättvikts djupinlärning, YOLOv8, fabrikautomation