Clear Sky Science · sv
Strategi för återuppbyggnad av fordonsbanedata för videogenkänning baserad på en tvåstegsmetod med interpolationsfiltrering
Varför det verkligen spelar roll att städa upp digital trafikdata
Varje gång en trafikamera följer bilar genom en korsning skapas en dold dataström som beskriver vart varje fordon åker, hur snabbt det rör sig och hur det accelererar eller bromsar. Den informationen är värdefull för säkrare vägar, smartare trafikljus och framtida självkörande fordon. Men i verkligheten är den datan rörig: bilar kan döljas bakom lastbilar, strålkastare bländar i regn och bildanalysalgoritmer gör misstag. Den här studien tar itu med en mycket praktisk fråga: hur kan vi förvandla den felaktiga videodatan till en pålitlig redogörelse för hur fordon faktiskt rörde sig?
När kameror misstolkar bilars rörelse
Videobaserad spårning är attraktiv eftersom den är billig, icke-invasiv och täcker stora områden. Ändå innehåller det råa resultatet två huvudproblem. Det första är uppenbara fel, som en bil som verkar hoppa bakåt, stanna ögonblickligen från motorvägshastighet eller uppvisa omöjliga accelerationstoppar. Dessa kommer oftast från ocklusion, rörelseoskärpa eller att spårningsprogramvaran tillfälligt tappar fordonet. Det andra problemet är slumpmässigt jitter — små, snabba skakningar i den rapporterade positionen. När hastigheter och accelerationer beräknas från dessa positioner förstärks skakningarna och normalt körbeteende ser ryckigt ut. Om de inte korrigeras kan dessa fel snedvrida trafikmodeller med mer än 40 procent, vilket i sin tur kan vilseleda säkerhetsstudier och system för automatisk körning.
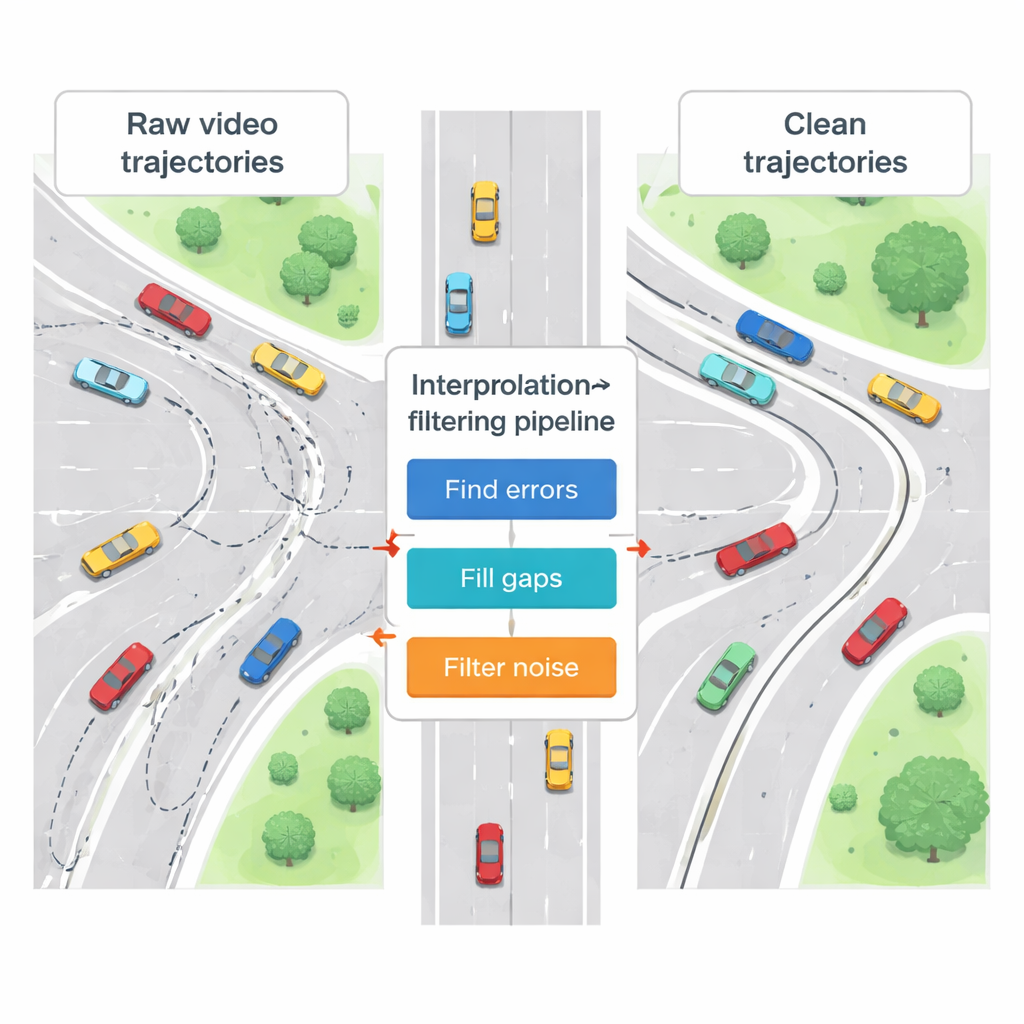
En tvåstegsplan för sanering
För att åtgärda detta föreslår författarna en tvåstegs återuppbyggnadsstrategi som fungerar som en försiktig digital mekaniker. Steg ett fokuserar på uppenbara misstag: det skannar varje fordonsregister efter hastigheter och accelerationer som bryter enkla fysiska gränser, såsom extrem jerk (mycket plötsliga förändringar i acceleration) eller accelerationer bortom vad en verklig bil och förare kan tolerera. När dessa avvikande punkter hittats ersätts de med hjälp av matematiska verktyg kallade interpolation, som uppskattar saknade värden utifrån närliggande, mer pålitliga punkter. Studien jämför flera varianter av interpolation och finner att en metod kallad Hermite-interpolation bevarar den naturliga banans form bättre än en mer traditionell Lagrange-metod, särskilt när rörelsen är komplex.
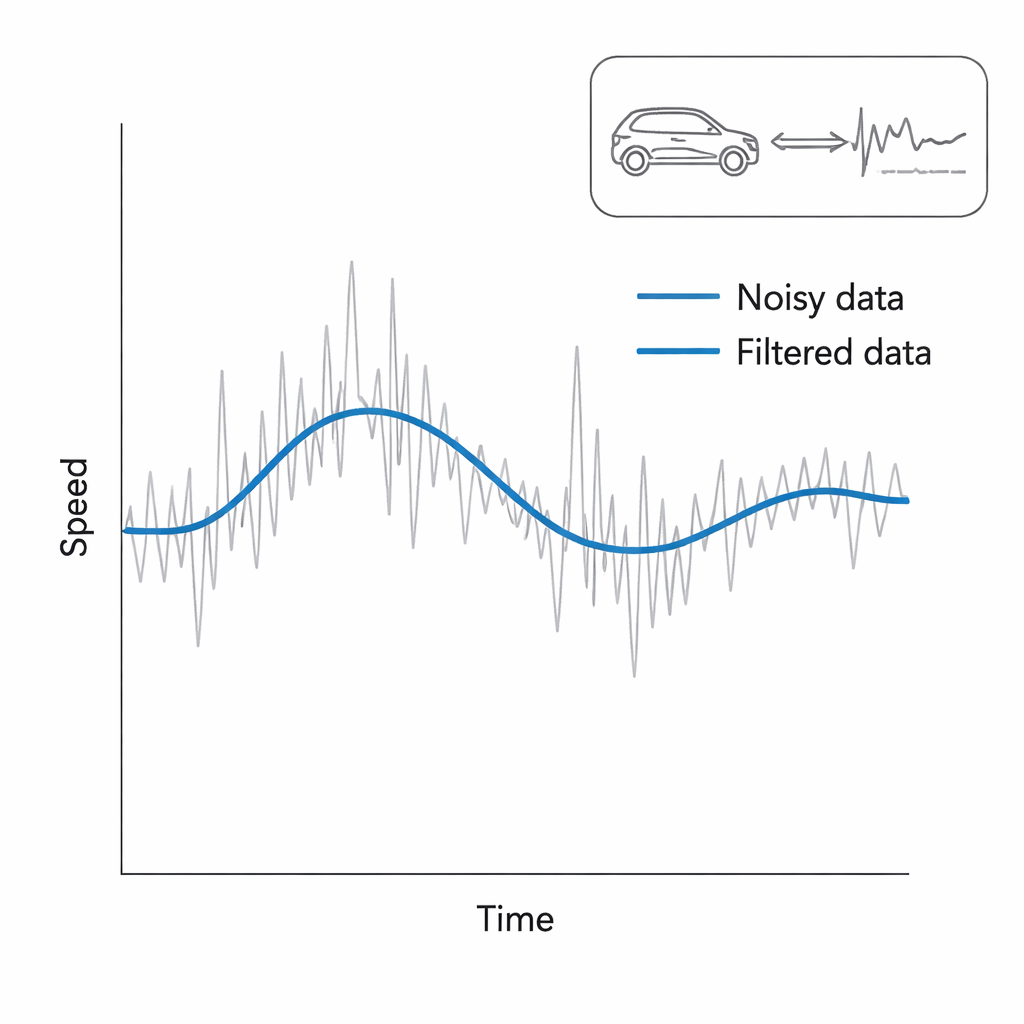
Att jämna ut den digitala färden
Steg två tar itu med det mer subtila problemet med brus. Även efter att grova fel åtgärdats kan de återstående spåren fortfarande se något skakiga ut. Här testar forskarna två sätt att jämna ut datan: en förfinad glidande medelvärdesmetod som ger större vikt åt nyare punkter, och en statistisk teknik känd som Kalmanfilter, som kontinuerligt uppdaterar sin bästa gissning av ett fordons verkliga position och hastighet när nya mätningar anländer. Båda teknikerna dämpar jitter, men Kalmanfiltret gör ett bättre jobb med att följa verkliga förändringar i körningen — till exempel en mjuk inbromsning eller ett filbyte — utan att sudda ut dem. Resultatet är en mjukare, mer realistisk beskrivning av hur varje fordon faktiskt betedde sig över tid.
Sätta metoden på prov
Teamet tillämpar sitt ramverk på verkligt videomaterial fångat vid en trafikerad stads-korsning i Zhengzhou, Kina, och använder moderna objektigenkännings- och spårningsverktyg för att extrahera fordonsbanor. De kör sedan dussintals olika fordonsloggar genom sin tvåstegsprocess och bedömer framgång med enkla fysiska måttstockar: hur mycket accelerationen fluktuerar och hur ofta jerk överstiger en nivå som anses orealistisk för personbilar. De jämför också de rengjorda videobaserade banorna med referensdata inspelade direkt från en bils instrumentpanel. Över många körmönster — jämn färd, kraftig inbromsning, filbyten — minskar den kombinerade interpolations- och filtreringsstrategin accelerationsvariabiliteten med ungefär 85 procent och eliminerar nästan orealistiska jerk-toppar, samtidigt som den bättre matchar instrumentbaserade register än flera konkurrerande metoder.
Vad detta betyder för vardagliga resor
I klarspråk visar denna artikel hur man förvandlar ofullkomligt material från vanliga trafikmärkamera till data som ingenjörer och automatiserade fordon faktiskt kan lita på. Genom att först reparera uppenbara störningar och sedan noggrant jämna ut brus producerar den föreslagna metoden realistiska digitala spår av hur bilar rör sig, utan krav på exotisk hårdvara eller tung beräkningskraft. Den klarare bilden kan mata in bättre trafikljusstyrning, mer exakta simuleringar av trängsel och säkrare självkörningsalgoritmer som är beroende av förståelse för verkligt körbeteende. Även om studien fokuserar på en stad och ännu inte täcker alla väder- eller vägförhållanden, lägger den fram en tydlig och praktisk väg mot att använda befintliga videonätverk som pålitliga sensorer för nästa generations intelligenta transportsystem.
Citering: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Nyckelord: fordonsbana, trafikvideodata, datarensning, intelligent transport, autonom körning