Clear Sky Science · sv
ESO-baserad adaptiv neuralt nätverksreglering för en quadrotor mot vind- och laststörningar
Hålla drönare stadiga i en rörig verklighet
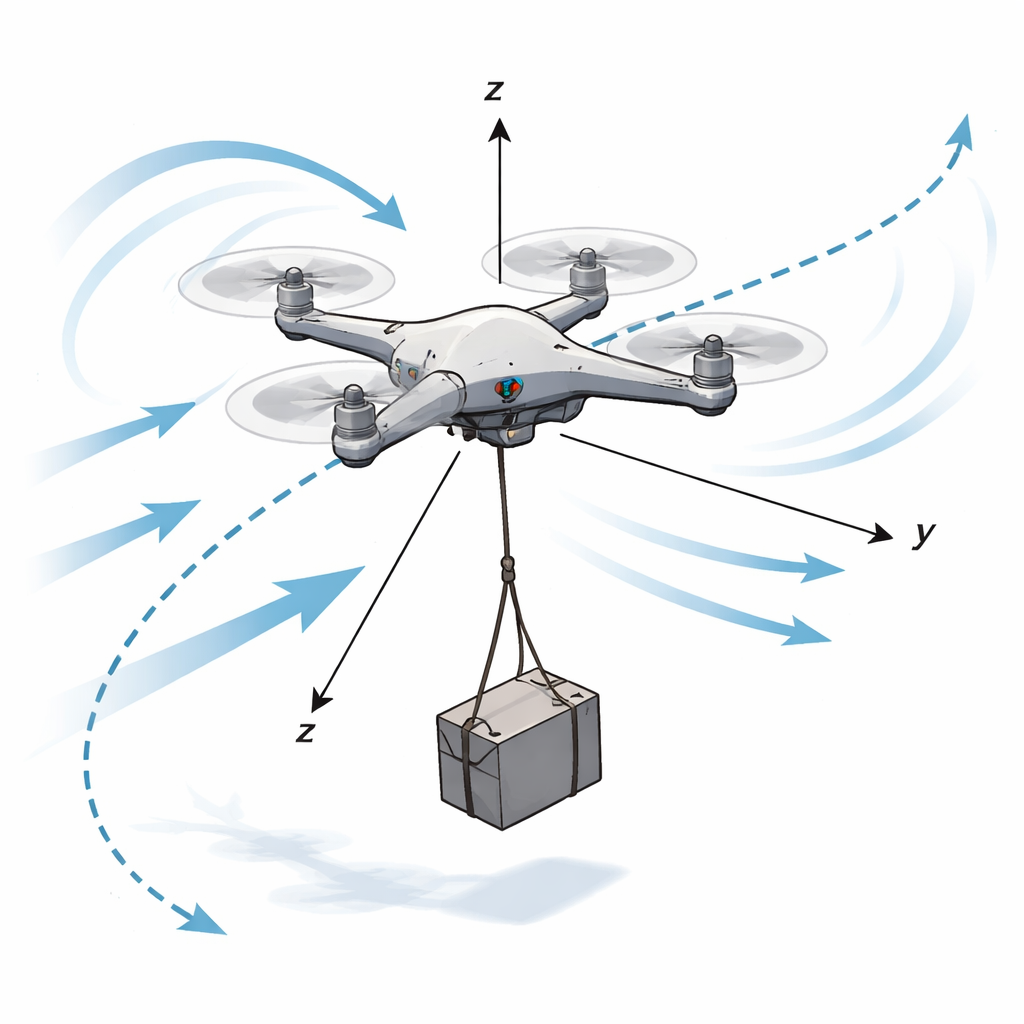
Små fyrrotorsdrönare används i allt högre grad för uppgifter som att inspektera broar, övervaka grödor eller leverera små paket. Men i verkligheten möter dessa flygande robotar ryckiga vindar och svajande laster hängande under sig, vilket lätt kan kasta dem ur kurs. I denna artikel presenteras en ny metod för att hålla sådana drönare flygande smidigt längs planerade banor, även när luften är orolig och en gungande last drar i dem.
Varför vind och hängande laster är så besvärliga
En quadrotor är i grunden svår att styra. Den är lätt, reagerar snabbt på små motorändringar och dess rörelser i olika riktningar är tätt sammankopplade. När starka eller snabbt föränderliga vindar träffar drönaren trycker de på den på oförutsägbara sätt. En kabelupphängd last, som en kamerauppsättning eller en flaska vätska, förvärrar situationen: lasten kan gunga som en pendel och föra tillbaka extra krafter till drönaren. Traditionella regulatorer, som den ofta använda PID-metoden eller mer avancerade sliding-mode- och backstepping-scheman, fungerar bra bara när ingenjörer känner drönarens fysik mycket noggrant och när störningarna är måttliga. Om den matematiska modellen är felaktig, eller om vind- och lastkrafterna förändras på komplicerade sätt, kan dessa metoder ge tröga responser, översläng eller synlig svajning i flygningen.
En smart väktare mot dolda störningar
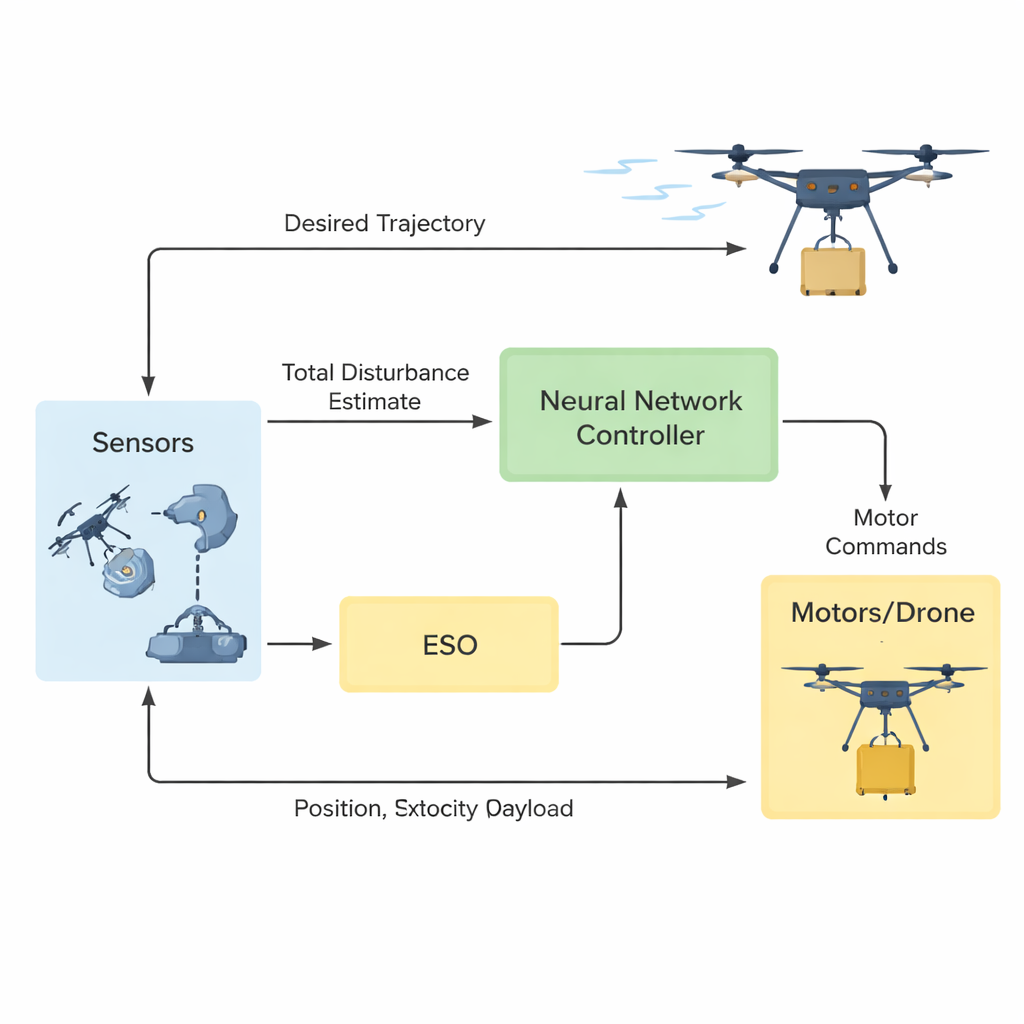
För att tackla detta bygger författarna vidare på ett koncept som kallas aktiv störningsuppskattning. Istället för att försöka modellera varje detalj av vinden och den gungande lasten behandlar de alla okända påverkan tillsammans som en enda "samlad" störning. En särskilt utformad utökad tillståndsobservatör fungerar som en matematisk väktare och härleder kontinuerligt denna totala störning från drönarens rörelser. Noterbart är att deras observatör ställs in med endast en huvudparameter, vilket förenklar uppsättningen avsevärt jämfört med många befintliga konstruktioner. Teorin visar att med korrekt inställning konvergerar observatörens uppskattning snabbt och förblir strikt begränsad, vilket innebär att den kan användas som en realtids framåtförskjuten korrigering snarare än bara en grov gissning.
Låta ett neuralt nätverk lära sig de svåra delarna
Även med goda störningsuppskattningar behöver regulatorn fortfarande veta hur drönarens motorer översätter kommandon till faktisk rörelse — en relation som beror på massa, geometri och andra fysikaliska detaljer som kan förändras över tiden. Istället för att förlita sig på en omsorgsfullt identifierad modell introducerar författarna ett radialt basfunktions-neuralt nätverk som lär sig denna relation direkt från flygsignaler. Regulatorn behöver bara veta var drönaren är, vart den ska och den andra derivatan av önskad bana (hur snabbt målpunktens acceleration ändras). En adaptiv lag uppdaterar kontinuerligt nätverkets interna vikter för att minska spårningsfel. Med Lyapunov-baserad analys bevisar författarna att under detta adaptiva schema förblir spårningsfelen likformigt begränsade och kan drivas godtyckligt små, samtidigt som viktuppdateringarna förblir stabila.
Testa metoden i praktiken
Teamet validerar sitt tillvägagångssätt både genom datorsimuleringar och verkliga experiment. I simuleringarna får drönaren följa utmanande tredimensionella spiralbanor samtidigt som den utsätts för slumpmässiga vindbyar och lastkrafter som förändras över tiden. Den nya regulatorn jämförs med tre andra avancerade metoder: linjär aktiv störningsundertryckning, sliding-mode-control, modellfri terminal sliding-mode-control och i ett svårare test adaptiv fraktionellordningskontroll. Över flera scenarier uppnår den föreslagna metoden jämnare banor och mindre RMS-positionfel, särskilt efter att störningar introducerats. I fysiska tester flyger forskarna en quadrotor inomhus medan två industrifläktar blåser luft mot den och en 200-grams vattenflaska hänger under. Rörelsefångstkameror registrerar drönarens position. Även under kontinuerlig vind och manuella ryck i lasten håller drönaren sin målpunktsposition inom några centimeter och motor kommandona förblir välhanterade, vilket tyder på att metoden är praktisk för verklig hårdvara.
Vad detta betyder för vardaglig drönaranvändning
För icke-specialister är huvudpoängen att detta arbete erbjuder ett sätt att göra drönare mer pålitliga i tuffa förhållanden utan att kräva fullständig kunskap om deras inre fysik. Genom att kombinera en enkel men kraftfull störningsobservatör med en lärande-baserad regulator kan systemet anpassa sig i realtid till vindbyar och gungande laster och hålla drönaren på kurs med minimalt behov av finjustering. Denna typ av robust, modell-lätt kontrol kan göra det enklare att använda drönare för rutinuppgifter i städer, på gårdar och i fabriker, och samma idéer kan så småningom utvidgas till flernaviga drönarsystem och felsäkra konstruktioner som fortsätter flyga säkert även när vissa komponenter fallerar.
Citering: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Nyckelord: quadrotorkontroll, drönarstabilitet, vindsstörning, neuronalt nätverksregulator, lastspårning