Clear Sky Science · sv
PCA-whitening förbättrar ljusåtergivningstoleransen för visuell platsigenkänning med Fouriersignaturer
Robotar hittar rätt inomhus
Föreställ dig en robot som rullar genom ett hem eller kontor där det ena dagen är starkt solljus och nästa dag dämpade lampor. För att veta var den befinner sig jämför roboten vad dess kamera ser nu med bilder den lagrat tidigare. Men när ljuset förändras drastiskt kan platser se nästan oigenkännliga ut. Den här artikeln undersöker en sparsam, matematikbaserad metod för att låta robotar känna igen platser från panoramabilder och visar hur ett statistiskt knep, PCA-whitening, gör metoden mycket mer tolerant mot skiftande belysning.
Se världen som vågor, inte pixlar
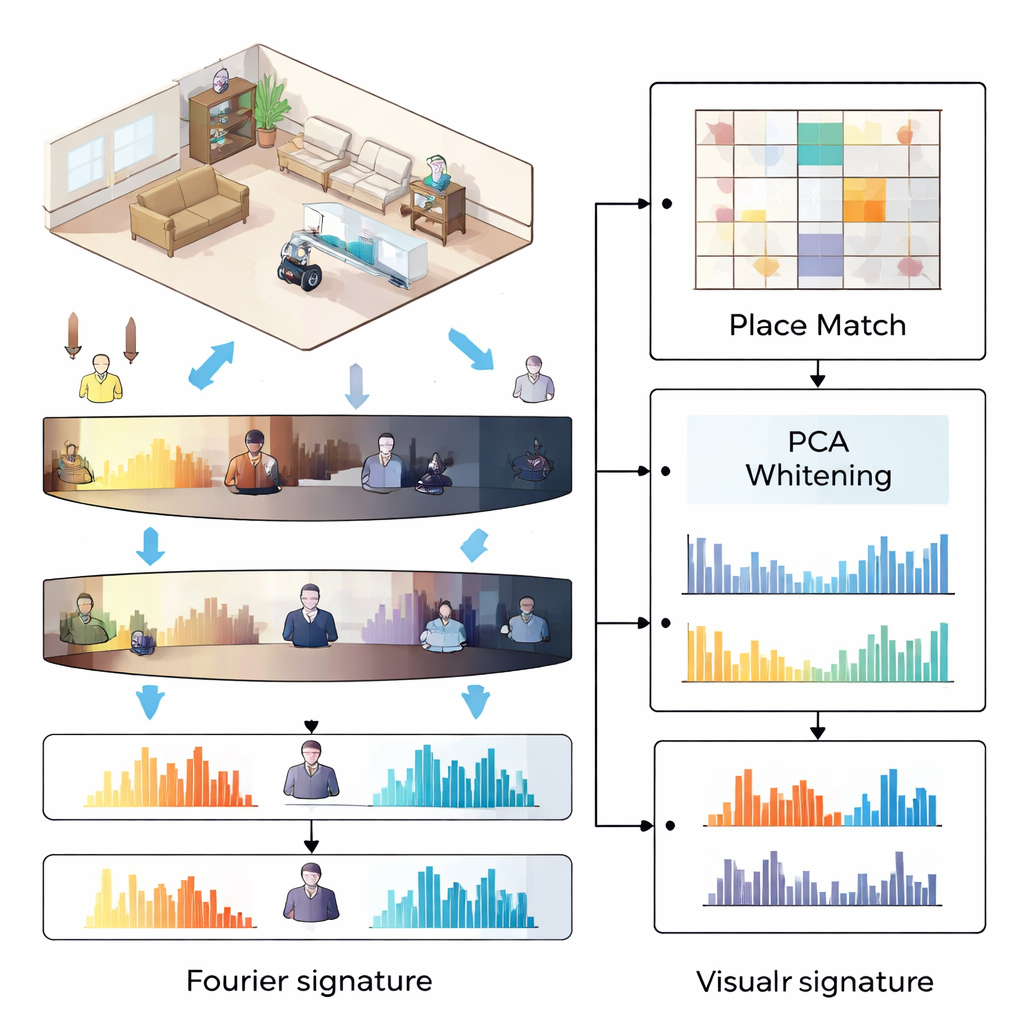
De flesta moderna system för visuell platsigenkänning använder många små bilddetaljer—kanter, hörn och texturer—och kombinerar dem sedan till ett kompakt ”fingeravtryck”. I kontrast bygger detta arbete på Fouriersignaturer, som betraktar en panoramabild inte som en pixlats matris utan som en blandning av vågor med olika frekvenser. Kameran fångar en 360-graders vy; denna panorama delas upp i horisontella band och varje band omvandlas till ett endimensionellt frekvensspektrum. Endast styrkorna (amplituderna) hos de lägsta frekvenserna bevaras och staplas till en descriptor. Eftersom metoden kastar bort information om var längs cirkeln egenskaperna uppträder förändras deskriptorn knappt när roboten bara vrider sig, vilket ger naturlig rotationsrobusthet.
Varför belysning ställer till det för enkla signaturer
Även om Fouriersignaturer är kompakta och snabba att beräkna, har de fortfarande problem när belysningen ändras kraftigt mellan inspelningar av samma plats. Naturliga bilder tenderar att ha mycket mer energi i låga frekvenser än i höga, och denna obalans påverkas av ljusförhållanden. Som en följd dominerar vissa delar av deskriptorn likhetsmåttet, och många poster är starkt korrelerade med varandra eftersom intilliggande rader i panoramat liknar varandra. Utan korrigering drivs systemets beslut om två bilder föreställer samma plats av en liten, redundant delmängd av värden, vilket gör det sårbart vid olika ljusförhållanden.
Rensa upp signalen med PCA-whitening
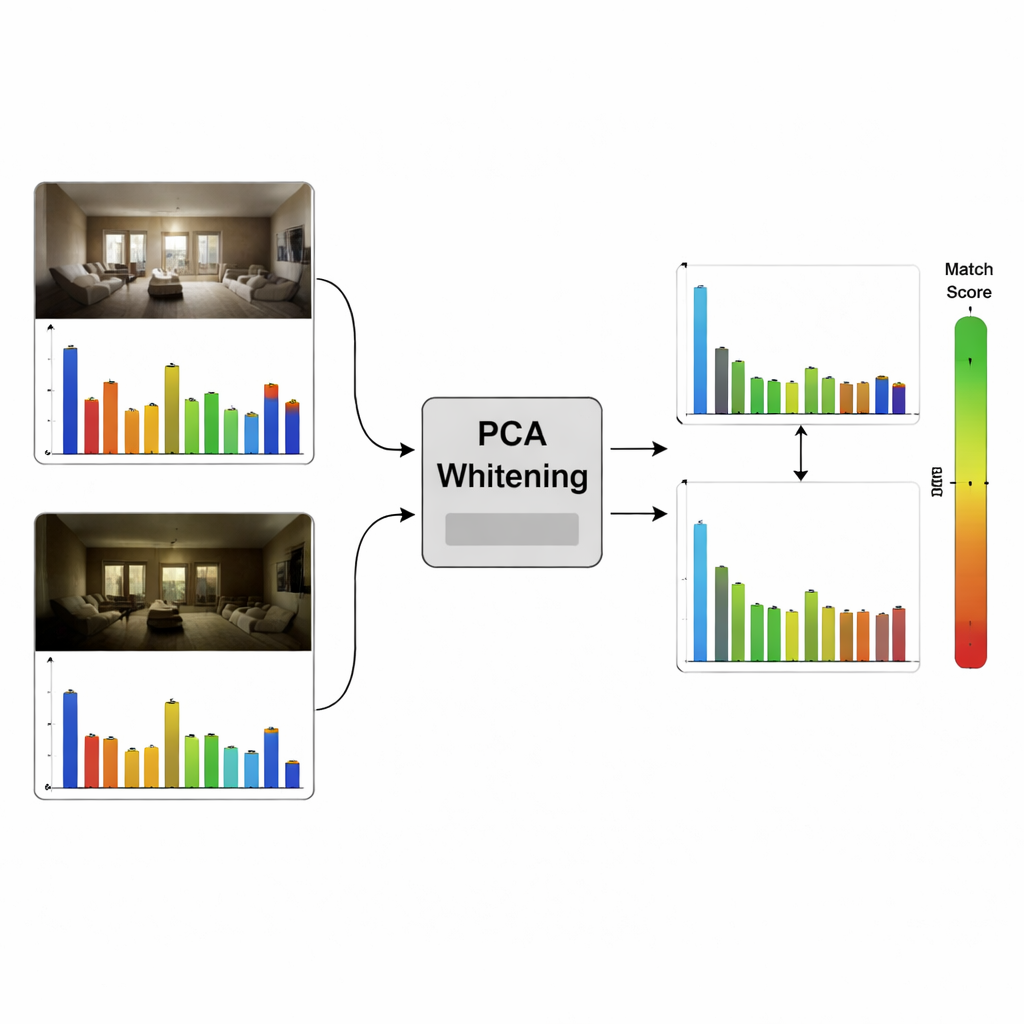
Författaren föreslår att man lägger till PCA-whitening som ett efterbehandlingssteg på Fourierdeskriptorerna. Med en uppsättning träningspanoramabilder från sju inomhusmiljöer lär sig systemet hur deskriptorns poster tenderar att variera och korrelera. PCA-whitening centrerar sedan om deskriptorn, roterar den till riktningar för oberoende variation och skalar om varje riktning så att alla får lika stort inflytande. Detta tar bort redundanta korrelationer och jämnar ut bidraget från olika frekvenser. Eftersom de transformerade posterna sorteras efter betydelse kan deskriptorn även förkortas säkert genom att kapa av den mindre viktiga svansen. Experiment på tre ej tidigare sedda miljöer med flera belysningsvarianter visar att whitening konsekvent ökar sannolikheten att rätt plats finns bland de högst rankade kandidaterna, särskilt i det praktiskt viktiga fallet där endast en kort lista med troliga träffar returneras.
Lättviktig men konkurrenskraftig mot djupinlärning
För att bedöma hur denna strömlinjeformade metod står sig mot dagens trender jämför artikeln den med AnyLoc, en ny metod för visuell platsigenkänning baserad på ett mycket stort vision-transformer-nätverk. AnyLoc använder också PCA-baserad kompression, men utgår från högdimensionella funktioner som produceras av djupinlärning. På det panoramabaserade inomhusdatasetet matchar eller överträffar whitendade Fouriersignaturer AnyLoc när systemet får föreslå upp till cirka tio kandidatbilder, vilket är en realistisk driftpunkt för många robotar. Avgörande är att Fouriersmetoden är betydligt billigare att köra: den förlitar sig på snabba Fouriertransformer och enkla matrisoperationer på CPU, medan AnyLoc behöver en kraftfull GPU och mycket mer tid per bild.
Vad detta betyder för vardagsrobotar
För en allmän läsare är huvudbudskapet att smart användning av klassisk matematik fortfarande kan konkurrera med tungviktig artificiell intelligens i vissa uppgifter. Genom att omvandla panoramabilder till balanserade, avkorelérerade deskriptorer gör PCA-whitening en enkel frekvensbaserad platsigenkänningsmetod mycket mer motståndskraftig mot ljusförändringar. Robotar som använder detta tillvägagångssätt kan lokalisera sig pålitligt i hem och kontor under ett brett spektrum av belysningsförhållanden, samtidigt som de använder måttliga beräkningsresurser. Det gör robust visuell navigation mer tillgänglig för mindre, billigare robotar som en dag kan dela våra vardagsrum.
Citering: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Nyckelord: visuell platsigenkänning, mobila robotar, panoramabildtagning, Fouriersignaturer, PCA-whitening