Clear Sky Science · sv
Förbättrad pure pursuit med dynamisk styrning för autonoma mobila robotar och tillämpning för säker navigation i kemiska anläggningar
Robotar som håller kursen
När robotar tar sig ut ur rena fabrikshallar och in i åkermarker och kemiska anläggningar måste de följa smala banor med stor precision. Ett litet skak kan förstöra grödor, kollidera med rör eller rulla in i ett område med brandfarliga gaser. Denna artikel beskriver ett nytt sätt för hjulburna robotar att styra och reglera hastigheten så att de kan hålla sig nära en planerad rutt både i öppna landskap och i trånga industrimiljöer.
Varför det är svårt att styra en robot
Många autonoma mobila robotar använder i dag en enkel regel kallad ”pure pursuit” för att följa en bana. Robot ser en kort bit framåt längs rutten, siktar mot den punkten och upprepar processen snabbt. I praktiken måste ingenjörer bestämma hur långt fram roboten ska ”titta” och hur snabbt den ska röra sig. Om lookahead-avståndet är för kort reagerar roboten nervöst och kan slingra sig från sida till sida. Om det är för långt reagerar den för långsamt och kapar kurvor, särskilt i tajta svängar eller vid högre hastigheter. Utomhus uppstår en annan komplikation: robotens position uppskattas genom att kombinera satellitsignaler, rörelsesensorer och hjulens rotationsdata, var och en med sina egna felkällor och fördröjningar.
En smartare metod för styrning och hastighetsval
Författarna föreslår en förbättrad metod kallad Pure Pursuit with Dynamic Steering Control (PP-DSC). Istället för att hålla lookahead-avståndet och hastigheten fasta, justerar roboten båda i realtid baserat på hur skarp kurvan är. När styrvinkeln är liten och banan nästan är rak använder roboten längre lookahead och högre hastighet för ett mjukt och effektivt färdssätt. När styrvinkeln ökar i kurvor minskar lookahead-avståndet och hastigheten sjunker automatiskt, vilket ger roboten mer tid att reagera och minskar sidoförskjutning. Detta beteende implementeras på en fyrhjulsdriven, bil-liknande robot som använder en modern robotikmjukvaruram tillsammans med högprecisionssatellitpositionering, en tröghetssensor och hjulencoders för att uppskatta sin rörelse.

Testning i fält och virtuella kemiska anläggningar
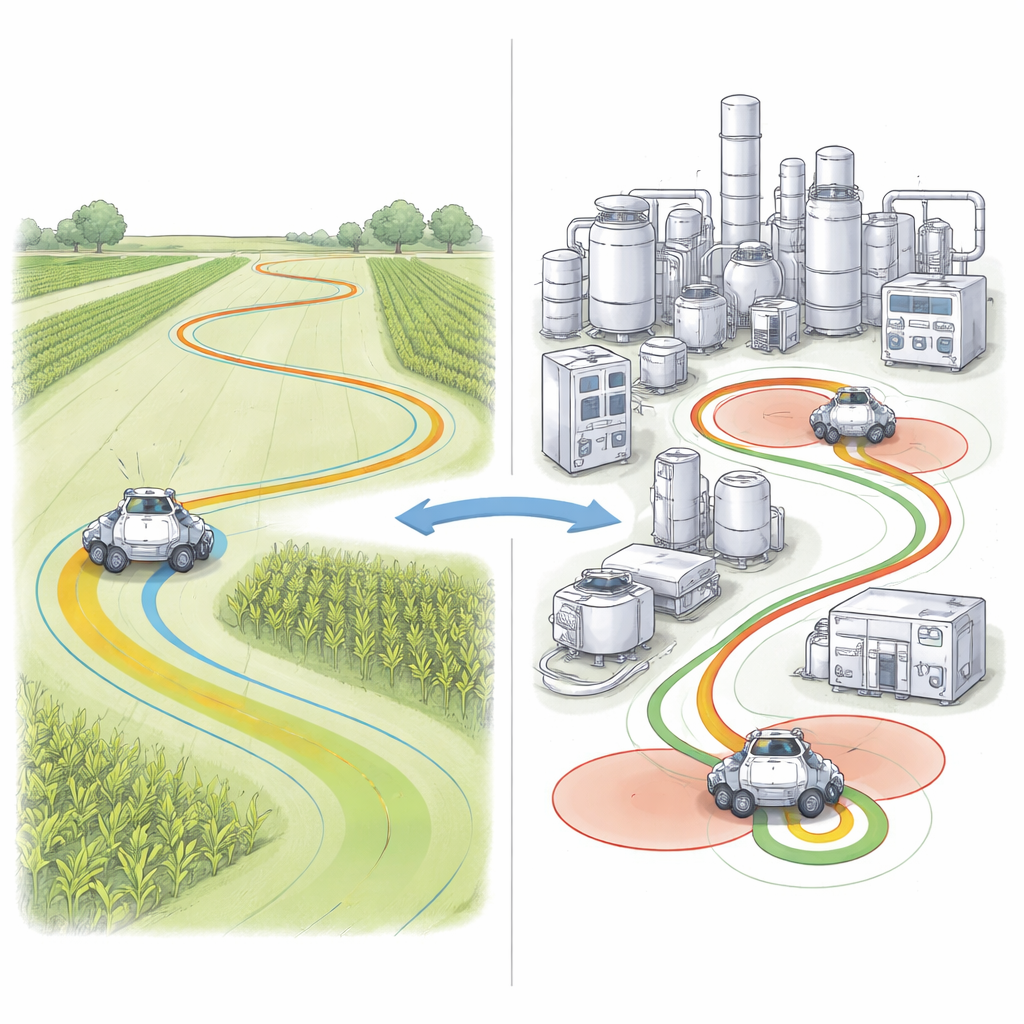
För att se hur väl PP-DSC fungerar körde teamet utomhusexperiment på tre grundläggande banor: en rak linje, en slinga och en figurs-åtta, i hastigheter från 1 till 5 meter per sekund. De jämförde den nya metoden med den standardmässiga pure pursuit-approachen. Den förbättrade regulatorn höll roboten mycket närmare den avsedda banan i samtliga fall. På raka linjer sjönk den genomsnittliga sidofelet till cirka fem centimeter, och på kurviga banor hölls felet under åtta centimeter. I kontrast kunde den traditionella metoden drifta med flera tiotals centimeter och visa större toppar vid in- och utgång ur svängar, särskilt vid högre hastigheter.
Lägga till säkerhet i riskzoner
Forskarna undersökte också hur en sådan robot skulle kunna bete sig inne i en kemisk anläggning, där den kan uppdragas att inspektera heta reaktorer eller transportera prover. Istället för att bygga en full industrimiljö använde de en detaljerad datormodell av en biodiesel-anläggning som inkluderade utrustningens positioner och zoner med högre brand- och explosionsrisk. De utökade sin regulator med en säkerhetsfaktor som automatiskt saktar ner roboten när den rör sig in i dessa riskzoner, baserat på ett standardiserat brand- och explosionsindex som används inom processäkerhet. Simulationer visade att denna säkerhetsmedvetna version av PP-DSC bara marginellt ökade spårningsfelet—mindre än en procent i genomsnitt—samtidigt som den säkerställde att roboten minskade hastigheten kring farlig utrustning.
Välja rätt verktyg för varje uppgift
En intressant iakttagelse är att ingen enskild styrstrategi var bäst överallt. På öppna fält med mjuka kurvor överträffade den dynamiska metoden klart den traditionella approachen och höll robotens bana tajt och jämn även vid högre hastigheter. I den trånga geometri som råder i en kemisk anläggning presterade dock ibland enkel pure pursuit med ett fast lookahead bättre, särskilt på täta slingor och självskärande figurs-åtta-banor där den dynamiska lookaheaden av misstag kunde styra roboten till fel del av banan. Författarna drar slutsatsen att robotar bör växla mellan strategier beroende på banans form: använda den förbättrade, säkerhetsintegrerade regulatorn för måttliga kurvor och riskmedveten färd, och falla tillbaka på ett fast lookahead-schema för mycket tajta eller slingrande spår. För icke-experter är huvudbudskapet att säker och pålitlig robotnavigation i verkliga anläggningar och på fält handlar inte bara om bra kartor och sensorer—hur roboten väljer var den tittar och hur snabbt den ska röra sig är lika viktigt.
Citering: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Nyckelord: autonoma mobila robotar, spårning av bana, styrningskontroll, GNSS-RTK-navigering, säkerhet i kemiska anläggningar