Clear Sky Science · sv
Lättviktsmålsdetektion och spårning av flera mål för UAV-inspektion i dagbrott
Smartare ögon i skyn
Dagbrott är stora, ogästvänliga miljöer där tunga lastbilar, grävmaskiner och människor ständigt är i rörelse. Att hålla allt säkert och i drift kräver ofta många personer på marken och dyr utrustning för positionsbestämning, samtidigt som små fel och obehöriga lätt kan undgå upptäckt. Denna artikel undersöker hur lättviktsintelligenta drönare kan patrullera dessa gruvor från ovan, automatiskt upptäcka utrustning, människor och problem i realtid samtidigt som de arbetar inom de strikta beräkningsbegränsningarna för ombordelektronik.
Varför gruvor behöver bättre vakthundar
Moderna gruvor förlitar sig redan på verktyg som satellitpositionering och specialradiofyrar för att spåra fordon och maskiner. Men dessa ”aktiva” system har döda vinklar: signaler kan blockeras av branta väggar, damm eller störningar, och de fungerar bara på fordon och personer som bär rätt enheter. De kan heller inte visa hur ett fel faktiskt ser ut. Drönare kan däremot flyga över svår terräng, fånga rika bilder och videor och följa icke-samarbetsvilliga mål som inkräktande fordon. Utmaningen är att kraftfulla synalgoritmer normalt kräver tunga datorer, medan drönare har begränsningar i vikt, kraft och processorkapacitet. Författarna satsar på att utforma ett detektions- och spårningssystem som både är precist och tillräckligt lätt för att köras direkt på en drönare.
Lära drönare se små och dolda mål
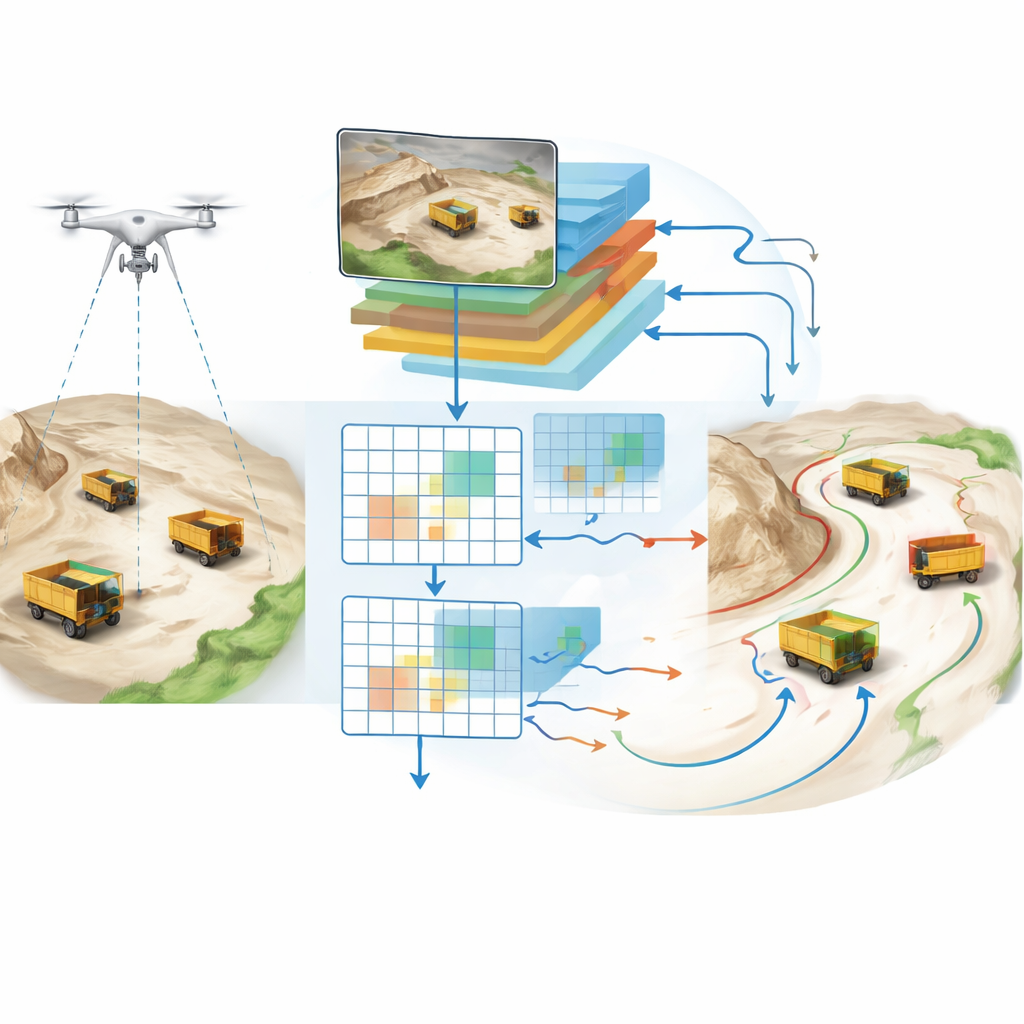
Kärnan i arbetet är en uppgraderad version av en populär synmodell kallad YOLO, finjusterad specifikt för dagbrott. Forskarna omformar modellens ”backbone” så att den kan följa de oregelbundna konturerna hos lastbilar, grävmaskiner och stenhögar, istället för att förlita sig på styva, rutnätslika filter. De redesignar också den del av nätverket som sammanför information från grova och fina bildskalor, så att små, avlägsna maskiner och större, närliggande sådana fångas tillsammans utan förväxling. Ovanpå detta fokuserar en ny, lätt beslutmodul uppmärksamheten på de mest informativa detaljerna i scenen, vilket hjälper systemet att skilja små felpunkter och delvis dolda maskiner från den röriga bakgrunden.
Få kraftfulla modeller att rymmas på en drönare
Även med dessa förbättringar kan en synmodell lätt bli för stor för drönarhårdvara. För att lösa detta tillämpar teamet en noggrann beskärningsstrategi som analyserar vilka interna kopplingar som bidrar mest till prestanda och sedan skär bort resten. Denna process minskar antalet parametrar och mängden beräkningar samtidigt som de starkaste vägarna i nätverket bevaras. Vid en optimal beskärningsnivå behåller systemet hög detektionsnoggrannhet men minskar modellstorlek, operationer och svarstid tillräckligt för att köras på en kompakt inbäddad processor, med lägre energiförbrukning och förlängd flygtid. Tester på en egen gruvdatamängd och på en publik drönarbenchmark visar att den beskurna modellen överträffar flera välkända alternativ, särskilt för små och delvis dolda mål.
Från ögonblicksbilder till jämna spår
Att upptäcka objekt i en bild är bara halva historien; gruvor behöver också veta hur varje lastbil eller person rör sig över tid. För detta förbättrar författarna en befintlig metod för spårning av flera objekt så att den hanterar trånga scener, liknande fordon och plötsliga rörelseförändringar bättre. De skapar en kombinerad likhetsmått som tar hänsyn till var ett mål är, hur det ser ut och även om det verkar lastat eller tomt. De korrigerar också rörelseprognoser för att ta hänsyn till förändrad acceleration, till exempel när en lastbil svänger eller klättrar i en sluttning. Tillsammans minskar dessa steg identitetsbyten—där ett fordon misstas för ett annat—och håller spårlinjerna mjuka och tillförlitliga, samtidigt som de är tillräckligt snabba för realtidsanvändning på drönarnivå hårdvara.
Mot obemannade, ständigt aktiva gruvpatruller
Slutligen placerar författarna sina syn- och spårningsmoduler i ett flerskiktigt inspektionssystem som kan samordna flera drönare, strömma data över 5G och ad-hoc-länkar och leverera resultat till markkontroll. I experiment över verkliga gruvor förbättrar denna uppställning tydligt noggrannheten och stabiliteten i övervakningen av utrustning jämfört med traditionella metoder. För icke-specialister är huvudsakliga slutsatsen att studien visar en praktisk väg för att små, effektiva flygande robotar kontinuerligt kan vaka över enorma industriplatser, upptäcka små fel, oregistrerade besökare och riskfyllda situationer innan de eskalerar—utan behov av klumpiga datorer eller täta nätverk av fyrar på varje fordon.
Citering: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Nyckelord: droneinspektion, dagbrott, objektdetektion, spårning av flera objekt, lättvikts-AI-modeller