Clear Sky Science · sv
En intracortikal hjärn-maskin-gränssnitt baserat på aktivitet i makakens ventrala premotorkortex
Lära hjärnan att flytta en markör
Föreställ dig att styra en datormarkör eller en robotarm enbart med tankekraft, även om dina muskler inte längre kan röra sig. Hjärn–maskin-gränssnitt (BMI) syftar till att göra det möjligt genom att översätta hjärnaktivitet till kommandon för externa enheter. De flesta system hittills har utgått från ett huvudområde för rörelse i hjärnan — men vad händer om det området är skadat, som vid stroke eller ALS? Denna studie undersöker om ett annat närliggande område, som vanligtvis kopplas till planering av handrörelser och att iaktta andras rörelser, också kan driva ett BMI på ett tillförlitligt sätt.
Ett nytt hjärnområde ansluter till laget
Klassiska BMI läser främst signaler från primära motorcortex, hjärnbarken som direkt styr viljemässiga rörelser, och från en angränsande planeringsregion kallad dorsala premotorkortex. Forskarna riktade istället uppmärksamheten mot en annan granne: ventrala premotorkortex, särskilt en zon kallad F5c. Hos makaker är F5c rik på celler som fyrar vid räckande och gripande av föremål och till och med när djuret bara betraktar handlingar på en skärm. Denna blandning av rörelse- och observationssvar föreslog att F5c skulle kunna vara väl lämpad att kontrollera en markör eller en robotisk ”avatar” utan att kroppen behöver röra sig.
Makaker, mikroelektroder och rörliga mål
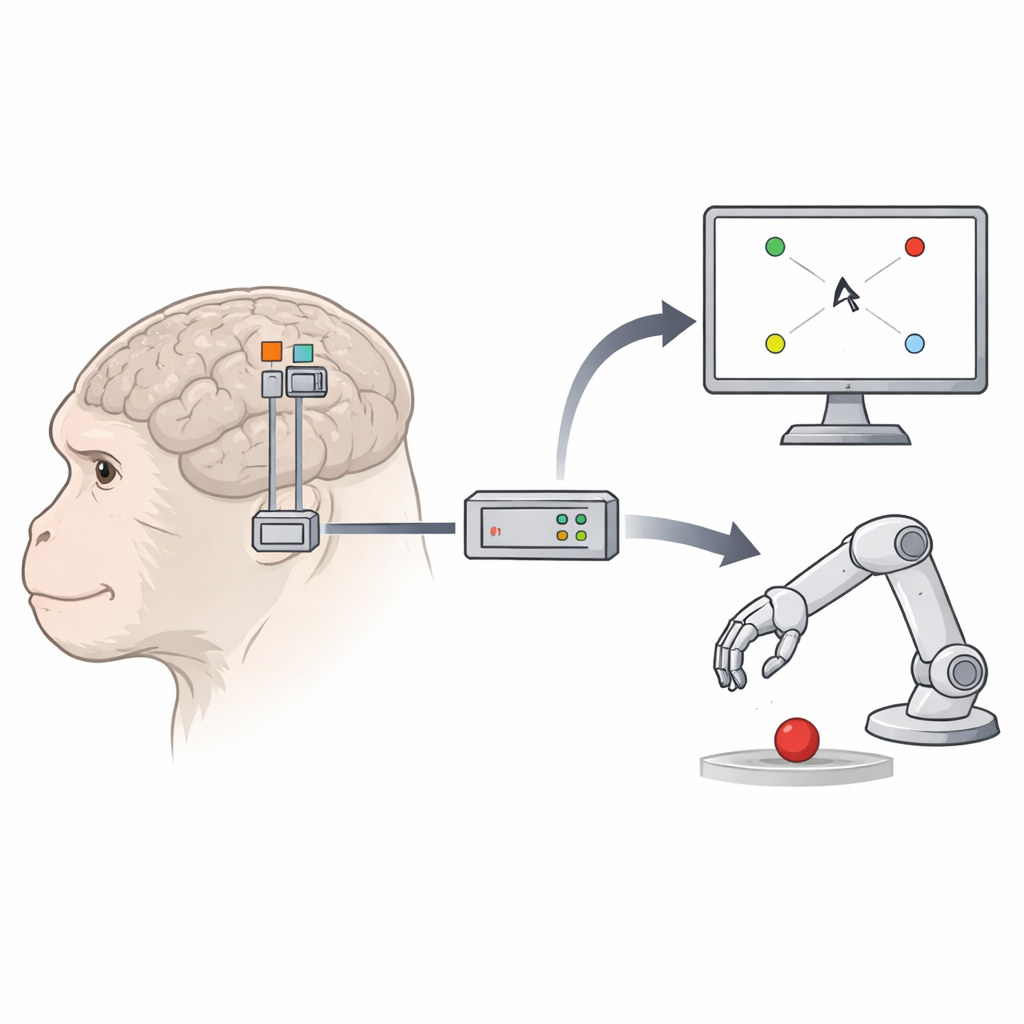
Två makakapor fick implanterade små 96-elektrodsgaller på tre platser: primära motorcortex, dorsala premotorkortex och F5c. Under dagliga sessioner utförde djuren flera visuellt enkla men beteendemässigt krävande uppgifter. I en uppgift rörde de vid mitten av en skärm och räckte sedan till ett av åtta yttre mål, samtidigt som en liten fyrkantig markör på skärmen rörde sig från mitten till samma mål. I en annan uppgift höll de handen stilla och betraktade bara markören resa till målen. I en tredje, mer verklighetstrogen uppställning, ersattes markören av en 3D-robotarm-avatar som räckte mot mål i en virtuell scen. Genom dessa uppgifter kunde teamet jämföra hur väl varje hjärnområde drev markör- eller avatar-rörelser.
Hur hjärnsignaler blev jämn rörelse
Under en träningsfas följde markören eller avataren datorgenererade, lätt böjda banor medan makakerna antingen rörde sig eller tittade på. Samtidigt spelade elektroderna in snabba utbrott av hjärnaktivitet. Forskarna tränade sedan en avkodare — ett matematiskt verktyg som lär sig kartlägga mönster av neuralt fyrande till hastigheter för markören eller avataren på skärmen. För att fånga endast de mest informativa kanalerna valde de elektroder vars aktivitet följde rörelseriktning och hastighet. De använde en metod som isolerar de hjärnmönster som står i närmast samband med beteendet och förbättrade den med ett icke-linjärt steg, vilket gjorde det möjligt för systemet att fånga mer komplexa relationer mellan neural aktivitet och rörelse. I avkodningsfasen slutade datorn driva markören eller avataren; istället använde avkodaren live hjärnsignaler, uppdaterade var 50:e millisekund, för att styra rörelsen på skärmen. Avkodaren tränades periodvis om i bakgrunden så att den kunde anpassa sig när de neurala responsmönstren förändrades över tid.

Hur bra presterade det ”nya” området?
Den centrala frågan var om F5c kunde mäta sig med eller komma nära prestandan hos de traditionella kontrollområdena. Hos båda makakerna låg F5c-baserad avkodning initialt efter när markören skulle flyttas, särskilt när djuren bara tittade och inte rörde sin egen hand. Men när sessionerna fortskred — och allt fler elektroder gav tillförlitliga rörelserelaterade signaler — kom F5c ikapp. I flera betingelser matchade dess prestanda primära motorcortex och överträffade det till och med i senare sessioner för passiv markörkontroll. Vid kontroll av robotavataren var den övergripande framgången lägre i alla områden, men F5c möjliggjorde fortfarande meningsfull kontroll, särskilt när den kombinerades med en mild assisterande algoritm som diskret guidar avataren mot målet. Viktigt är att neuroner i alla tre regionerna visade liknande mönster av riktningstuning och populationsaktivitet under den datorstyrda träningsfasen och den aktiva kontrollfasen, med endast en delmängd som ändrade sina föredragna riktningar när makakerna lärde sig att köra BMI.
Vad detta betyder för framtidens neuroteknik
För en icke-specialist är det viktiga slutsatsen att ventrala premotorsområdet F5c — tidigare betraktat främst som ett planerings- och observationsområde — också kan fungera som ett praktiskt kontrollcentrum för hjärn–maskin-gränssnitt. När tillräckligt många rörelserelaterade signaler finns tillgängliga kan avkodare tränade på F5c-aktivitet styra en skärmmarkör eller en assisterande robot nästan lika bra som de som baseras på det klassiska rörelseområdet. Det antyder att framtida kliniska BMI kanske inte behöver förlita sig på en enda kortikal region. För personer vars primära motorcortex är skadat skulle närliggande planeringsregioner som ventrala premotorkortex kunna erbjuda en alternativ väg för att återfå kontroll över digitala verktyg, protetiska enheter eller hjälpmedel för rörlighet.
Citering: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Nyckelord: hjärn-maskin-gränssnitt, motorcortex, premotorkortex, neurala avkodningar, protetisk kontroll