Clear Sky Science · sv
En virtuell-struktur-baserad typ-3 fuzzy-system för prediktiv detektion, kompensation och kontroll av sensor- och aktuatorfel i icke-linjära system
Hålla maskinerna på rätt spår när delar börjar krångla
Moderna tekniker — från robotarmar på fabriker till kemiska anläggningar som reglerar surhetsgrad — förlitar sig på sensorer och aktuatorer som tyst håller allt i drift. Men när dessa komponenter drifter, fastnar eller slutar fungera kan ett system bli osäkert långt innan någon märker det. Denna artikel presenterar ett nytt sätt för maskiner att själva upptäcka och åtgärda sådana problem, även när ingen ingenjör har en exakt matematisk modell av systemets inre beteende.
Varför dolda problem är så svåra att fånga
I många verkliga tillämpningar är systemets beteende starkt icke-linjärt: små förändringar i insignal kan ge stora, oväntade utslag i utsignalen. Traditionella styrmetoder antar att konstruktörer känner till de ekvationer som beskriver detta beteende och att sensorer och aktuatorer i huvudsak fungerar som förväntat. I praktiken åldras komponenter, blir brusiga eller byts ut mot något snarlik hårdvara. Konventionella felsäkra styrsystem bygger antingen in fasta säkerhetsmarginaler (passiva metoder) eller förlitar sig på noggranna modeller för att upptäcka och hantera fel (aktiva metoder). Båda angreppssätten får problem när systemet förändras över tid eller när dess inre funktioner inte är fullt kända. Författarna menar att industrin behöver styrenheter som lär sig från aktuell data, känner igen när sensorer eller aktuatorer beter sig felaktigt och kompenserar för dessa fel i realtid utan att behöva en detaljerad ritning över systemet.
En lärande regulator som ser systemet som en svart låda
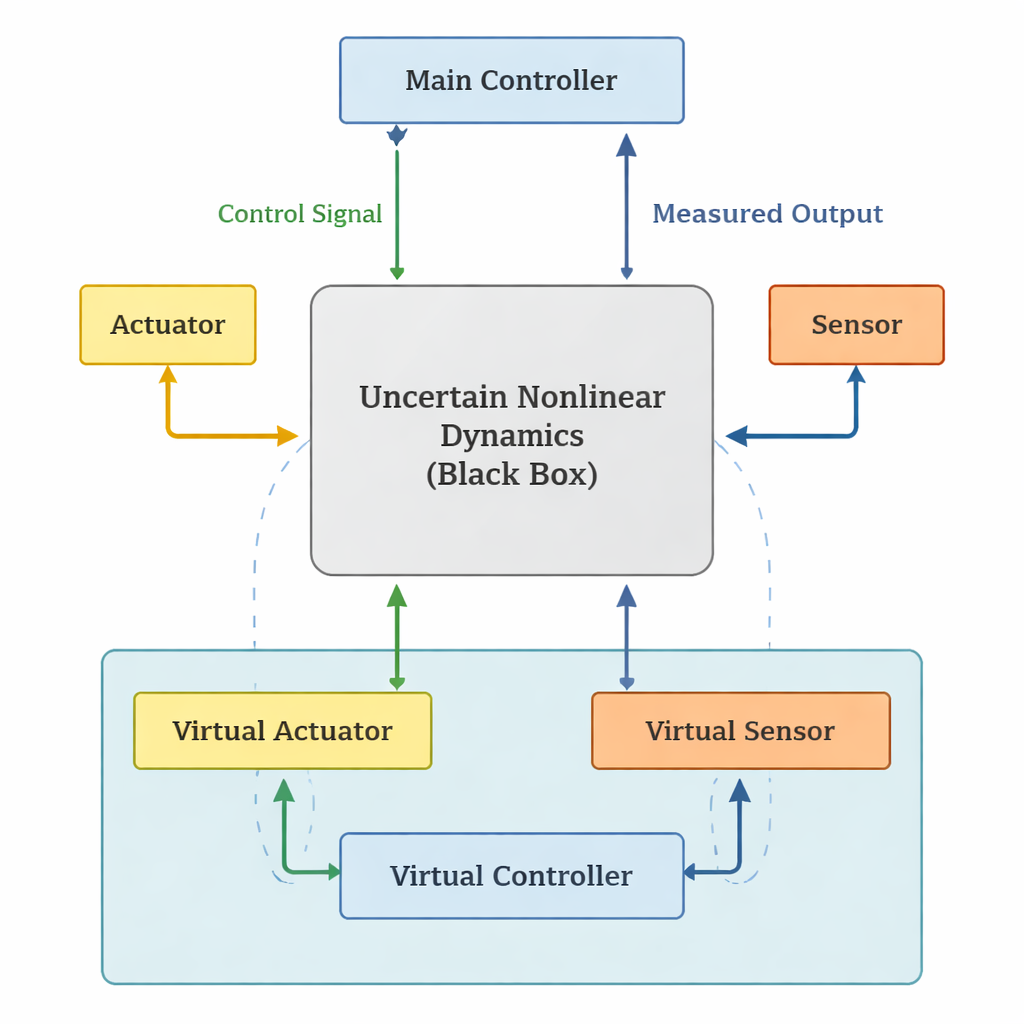
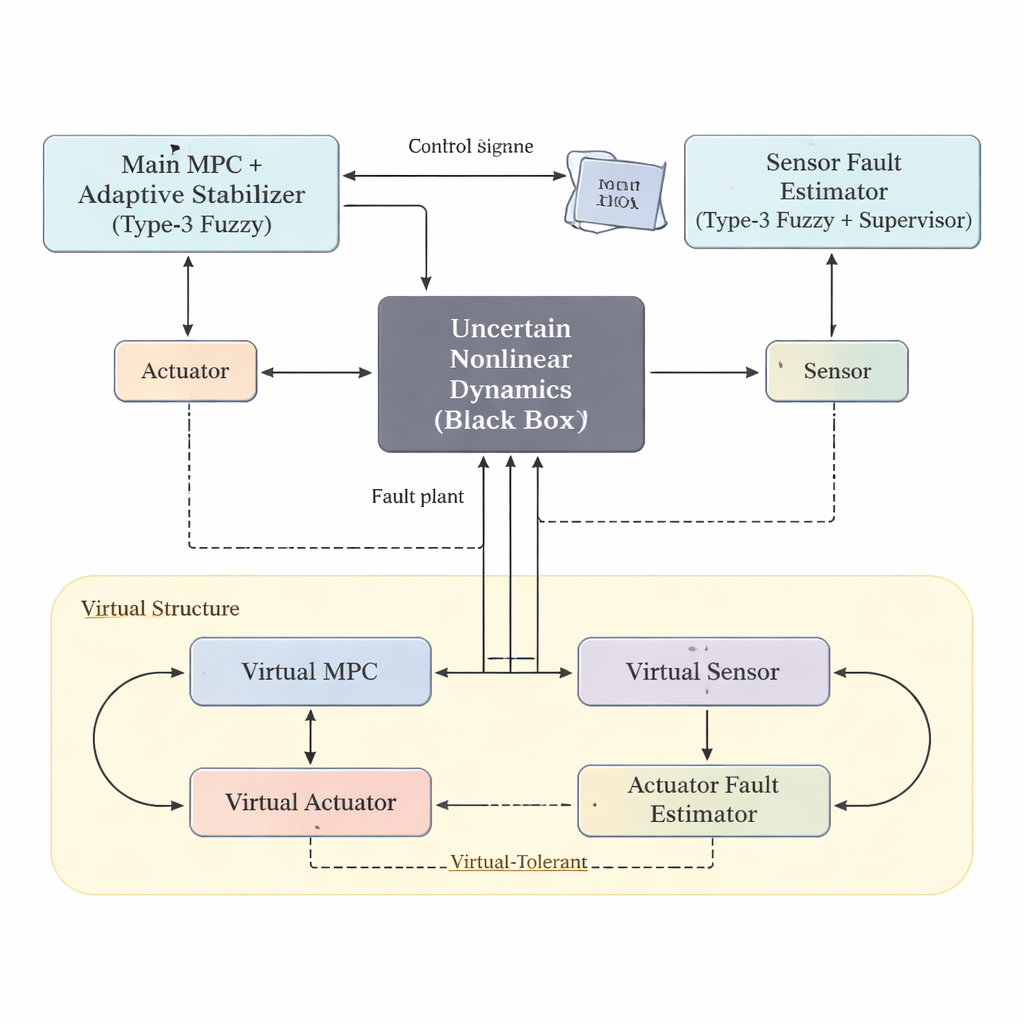
Det föreslagna ramverket betraktar processen helt som en svart låda: det ser bara de styrsignaler som skickas in och de utsignaler som mäts av sensorerna. Kärnan är ett typ-3 fuzzylogiksystem, en avancerad form av fuzzy-modellering utformat för att hantera stark osäkerhet och mätbrus. Detta fuzzy-system lär sig en kompakt in–ut-beskrivning av den okända dynamiken online, medan en modellprediktiv regulator (MPC) använder den inlärda modellen för att planera framtida styråtgärder över en kort horisont. En adaptiv stabiliserande enhet körs parallellt och säkerställer att även om modellen är ofullständig eller parametrar driver, håller den kombinerade återkopplingen följselsfelet begränsat och slutligen dras mot noll.
Att bevaka bevakarna: upptäckt av sensor- och aktuatorfel
Ramverket delar upp felhanteringen i två koordinerade delar. För det första använder en sensorfel-enhet två ytterligare typ-3 fuzzy-estimatorer plus en övervakande block för att sluta sig till hur mycket en sensormätning avvikit från sitt förväntade jämviktstillstånd. Därifrån genereras en korrigerande signal som effektivt ”motverkar” den felaktiga mätningen så att huvudregulatorn fortsätter att se en pålitlig utsignal. För det andra bygger metoden en virtuell struktur som speglar det verkliga systemet: den inkluderar en virtuell sensor, en virtuell aktuator, en egen fuzzy-identifierare och en virtuell MPC. Eftersom den virtuella slingan inte lider av den verkliga aktuatorns degradering avslöjar skillnader mellan den virtuella och den verkliga styrvägen hur illa den verkliga aktuatorn misslyckas. En enkel formel omvandlar detta gap till en uppskattad felnivå, vilken därefter kompenseras i huvudstyrsignalen.
Bevisa stabilitet och testa på robotar och kemiska tankar
För att visa att angreppssättet inte bara är intuitivt utan även matematiskt hållbart konstruerar författarna en Lyapunov-funktion — en slags energimått — som inkluderar följselsfel, modelleringsfel och de justerbara fuzzy-parametrarna. De härleder uppdateringslagar för de adaptiva termerna så att denna energi alltid minskar, vilket visar att felen krymper över tid även vid störningar och fel. Simuleringar testar sedan metoden på två mycket olika exempel: en enkelledad robotarm och en pH-neutraliseringsprocess i en kemisk tank. I båda fallen behandlas de verkliga dynamikerna som helt okända, parametrar varierar och både sensor- och aktuatorfel injiceras under drift. Regulatorn upprätthåller noggrann följning, lär sig snabbt felstorlekarna och håller risk- och felmått låga, och överträffar enklare fuzzy-regulatorer samt andra avancerade felsäkra scheman från litteraturen.
Vad detta innebär för verkliga system
För icke-specialister är huvudbudskapet att denna metod ger komplexa system en slags inbyggd självkännedom. Istället för att förlita sig på en perfekt modell eller manuell ominställning av ingenjörer lär sig regulatorn kontinuerligt från den data den ser, märker när sensorer eller aktuatorer börjar ljuga eller försvagas och korrigerar automatiskt sina åtgärder för att hålla prestandan stabil. Eftersom den bara behöver in- och utdata kan den i princip tillämpas på många olika maskiner utan att allt måste omdesignas från grunden. Resultaten bygger visserligen på simuleringar och hårdvarufrågor återstår att utforska, men arbetet pekar mot mer motståndskraftiga robotar, industriella processer och andra autonoma system som förblir pålitliga även när deras komponenter och miljöer är långt från idealiska.
Citering: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Nyckelord: felsäker styrning, fuzzylogik, modellprediktiv styrning, sensor- och aktuatorfel, icke-linjära system