Clear Sky Science · sv
Ett förbättrat YOLOv11-nätverk för upptäckt av marint skräp i undervattensmiljö
Varför det spelar roll att upptäcka skräp under ytan
Långt under havsytan samlas plastpåsar, flaskor, fiskelinor och annat skräp tyst upp. Detta avfall skadar det marina livet, täpper igen känsliga habitat och kan till och med störa undervattensrobotar som forskare använder för att studera och skydda havet. Artikeln som sammanfattas här beskriver ett smartare datorsynssystem som hjälper kameror och robotar att automatiskt hitta och märka undervattensskräp i realtid, även i grumligt och rörigt vatten.
Utmaningen att se tydligt under vattnet
Till skillnad från klara dagsfoton på land är undervattensbilder ofta mörka, disiga och tonade i blått eller grönt. Ljus avtar snabbt med djupet, sand och plankton gör vattnet grumligt, och skräpföremål är ofta små, delvis dolda eller ser ut som stenar och växter. Traditionella bildbehandlingsmetoder har svårt i dessa förhållanden, och även moderna djuplärande-detektorer kan missa små objekt eller missta bakgrundstextur för skräp. Ändå är noggrann och snabb detektion avgörande för att kartlägga föroreningar, styra städrrobotar och följa hur marint skräp förändras över tid.
Bygger vidare på en snabb synarbetsstam
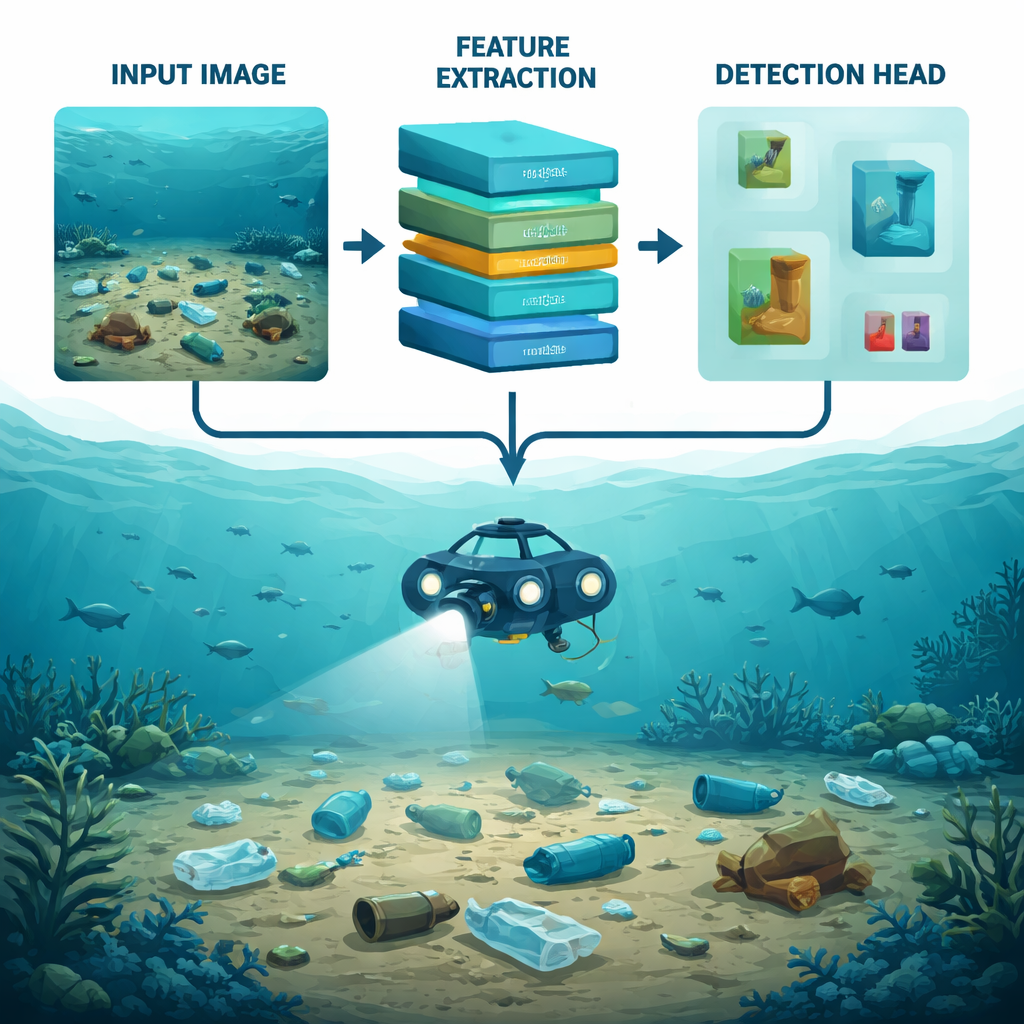
Författarna bygger vidare på YOLOv11, en nyare medlem i ”You Only Look Once”-familjen av objektdetektorer. YOLO-modeller är populära eftersom de skannar en bild en gång och förutser placeringar och typer för många objekt i realtid. Men standarddesignen för YOLOv11 skapades för mer typiska scener, som gator eller inomhusbilder, inte för den visuellt krävande undervattensmiljön. För att täppa till detta gap omdesignar forskarna två nyckelkomponenter i nätverket: hur det först extraherar visuella mönster från en bild, och hur det senare avgör vilka delar som är viktiga skräpobjekt och vilka som bara är brusig bakgrund.
En ny metod för att plocka ut detaljer i flera storlekar
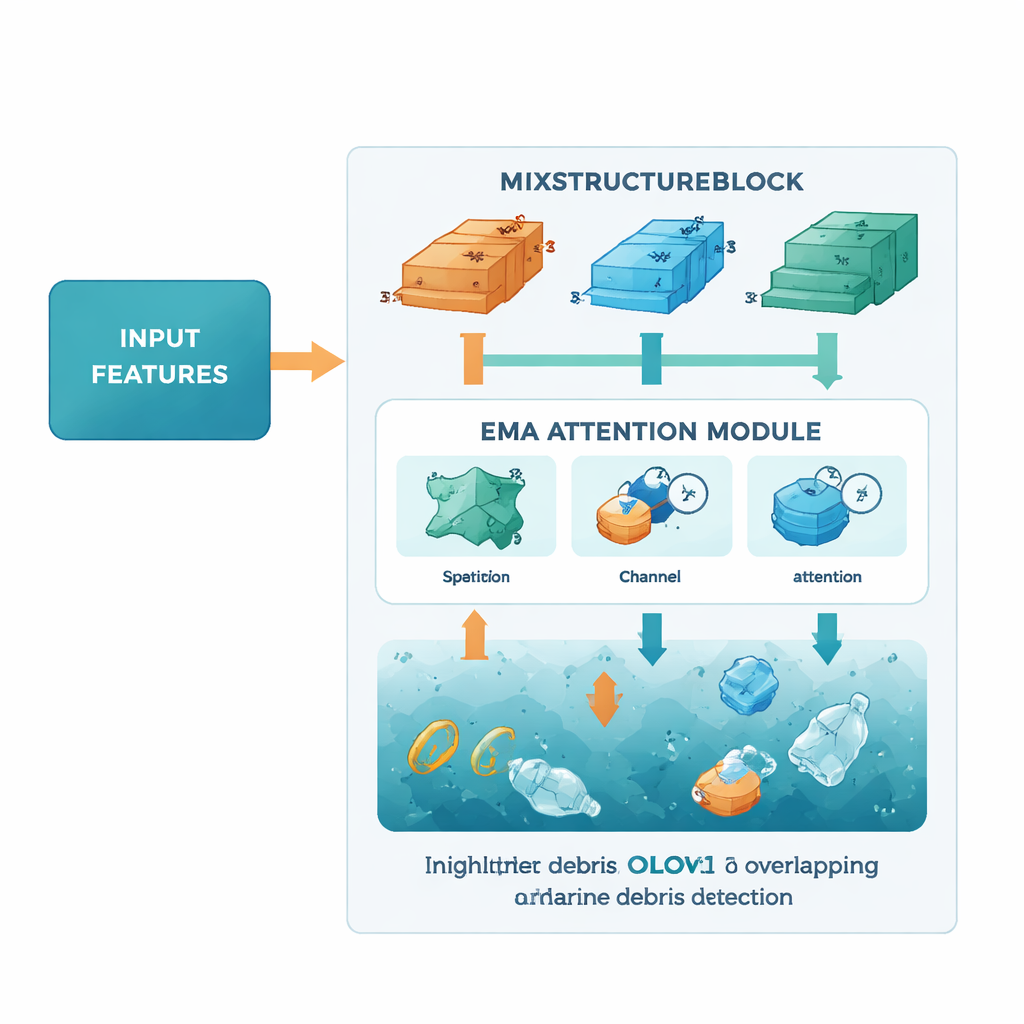
Den första förbättringen är en modul kallad MixStructureBlock, som ersätter ett standardblock i YOLOv11:s backbone. Istället för att använda ett fast mönster av filter kör MixStructureBlock flera parallella grenar som betraktar scenen med olika ”fönsterstorlekar” och mellanrum. Detta hjälper nätverket att uppfatta både fina detaljer, som kanten på en flaskkapsyl, och större former, som en drivande påse. Utöver detta innehåller blocket enkla attention-mekanismer som lär sig att framhäva informativa färger och positioner samtidigt som de nedtonar ovidkommande bakgrundspartier. Resultatet blir en rikare, renare uppsättning funktioner som gör små, svaga skräpbitar lättare att upptäcka.
Lär nätverket var det ska fokusera
Den andra uppgraderingen är en Efficient Multi-scale Attention (EMA)-modul, tillagd längre fram i nätverket där detekteringar görs. EMA ser på funktionskartorna både över rummet och över kanaler, och ställer effektivt två frågor samtidigt: ”Var i bilden händer något viktigt?” och ”Vilka typer av mönster är mest relevanta just nu?” Genom att poola information i flera skalor och använda lätta matematiska operationer skärper EMA nätverkets fokus på troliga skräppartier—såsom överlappande objekt eller svaga föremål långt från kameran—samtidigt som den håller modellen kompakt och snabb nog för realtidsbruk på inbyggd hårdvara.
Sätter systemet på prov
För att bedöma sin design tränade och utvärderade teamet modellen på TrashCan, en stor publik samling djuphavsbilder samlad i Japan. En version av datasetet märker upp skräp efter specifik objekttyp (som kopp, påse eller metallrör), medan en annan grupperar föremål efter material (som plast eller tyg). På båda versionerna överträffar det förbättrade nätverket flera starka baslinjer, inklusive den ursprungliga YOLOv11, tidigare system för marint skräp och andra undervattensinriktade YOLO-varianter. Det upptäcker inte bara fler skräp korrekt, särskilt små och trängda föremål, utan gör det också med en anmärkningsvärt liten modellstorlek på ungefär 5 megabyte, vilket passar väl för strömsvaga undervattensfarkoster.
Vad detta betyder för renare hav
Kort sagt visar studien att en noggrann omprövning av hur en AI ”ser” undervattensbilder kan göra verklig skillnad för att hitta skräp under vågorna. Genom att kombinera multiskalig mönsterextraktion med smart uppmärksamhet på viktiga regioner hittar det föreslagna systemet mer skräp samtidigt som det förblir tillräckligt effektivt för realtidsbruk. Utsatt på kameror och undervattensrobotar kan sådan teknik hjälpa forskare och myndigheter att kartlägga föroreningshotspots, styra saneringsinsatser och övervaka om policyer för att minska marint skräp fungerar—vilket för oss ett steg närmare friskare hav.
Citering: Yuanwei, J., Yijiang, D., Xuemei, W. et al. An improved YOLOv11 network for marine debris detection in underwater environment. Sci Rep 16, 7074 (2026). https://doi.org/10.1038/s41598-026-38305-0
Nyckelord: upptäckt av marint skräp, undervattensrobotik, objektidentifiering, djuplärande, havsförorening