Clear Sky Science · sv
Forskning om positionsmetod vid paketsortering i oordnad logistik
Varför smartare paketsortering spelar roll
Varje nätbeställning du gör sätter igång en dold balett av kartonger i enorma logistikcenter. Innan ett paket kan rusa mot din dörr måste det hittas, plockas upp, mätas, skannas och dirigeras—ofta från en kaotisk hög med blandade försändelser. Idag förlitar sig mycket av det första "reda ut kaoset" fortfarande på mänskliga arbetare som utför repetitiva, tröttande uppgifter. Denna artikel presenterar en ny visionsbaserad metod som hjälper robotar att pålitligt hitta var de ska gripa varje paket i en röra, och tar ett steg närmare fullständigt automatiserad, snabbare och mindre arbetsintensiv paketsortering.
Från röriga högar till robotvänliga data
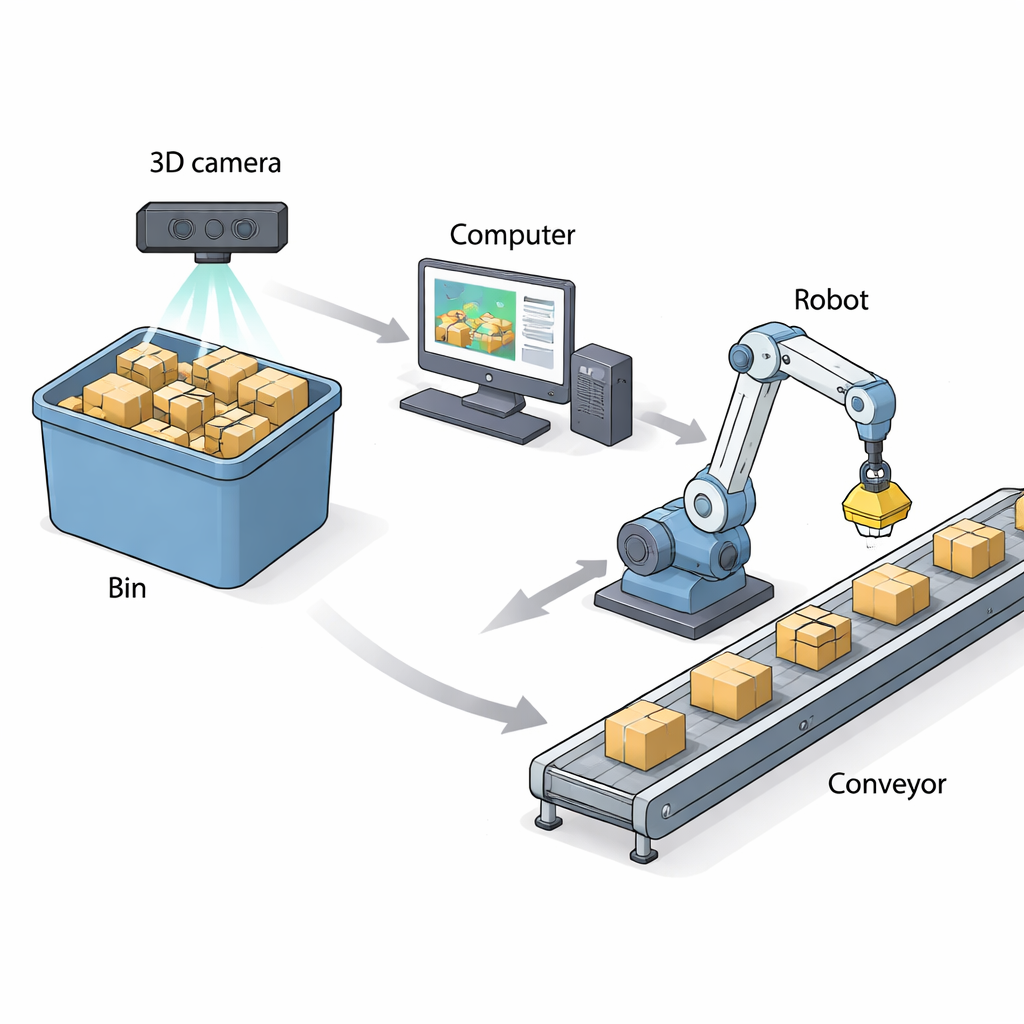
Forskarna fokuserar på det de kallar "oordnade" logistiska försändelser: vardagliga kartonger och mjuka kuddar som slängts i behållare utan någon ordning, ibland tilltryckta eller böjda av stapling. För att ersätta människor i denna röriga miljö behöver en robot först veta exakt var den ska nå och hur den ska orientera sitt gripdon på ytan av ett målpaket. Teamet bygger ett system runt en 3D-kamera som fångar både en färgbild och en djupkarta av översta lagret av försändelser. Ett modernt igenkänningsnätverk (baserat på YOLOv8) upptäcker enskilda paket i färgbilden, medan djupkartan avslöjar deras tredimensionella form. Denna kombination gör det möjligt för datorn att välja det bästa paketet att plocka härnäst—ett som inte är alltför ockluderat och tillräckligt långt från behållarens kanter—innan den beräknar en noggrann greppunkt.
Hitta en stabil greppunkt med tre punkter och en skugga
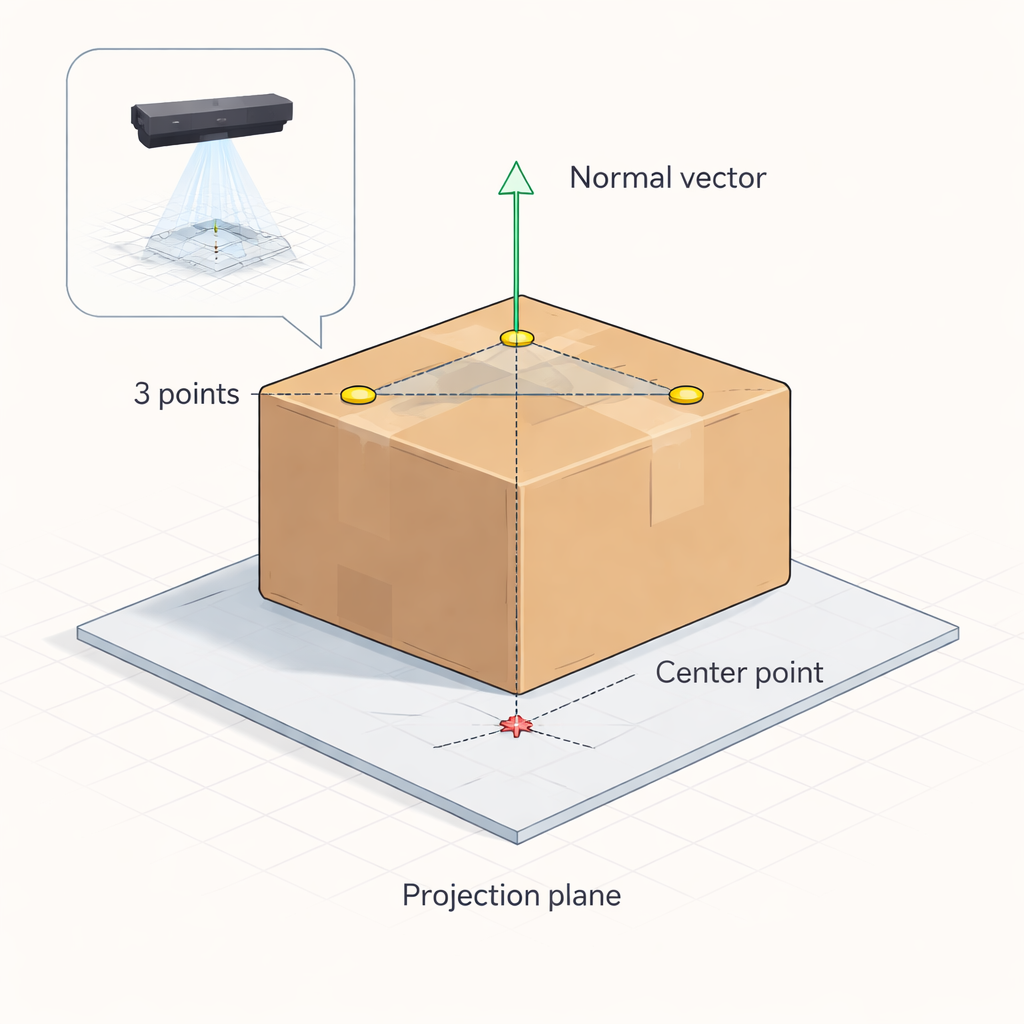
Kärnan i metoden är ett geometriskt trick som författarna kallar en trepunkts-orienterings–projektion-centreringsalgoritm. När ett målpaket valts, väljer systemet slumpmässigt tre punkter på dess överyta från djupdatan. Dessa tre punkter definierar ett plan, precis som tre nålar på ett bord bestämmer bordets lutning. Från detta plan beräknar algoritmen en "normal" riktning—en rät linje som sticker ut vinkelrätt från paketets yta. Parallellt använder systemet paketets fyra övre hörn i bilden för att härleda den geometriska centrumet av dess projicerade kontur, liknande att hitta centrumet av en rektangels skugga. Genom att kombinera planets orientering med denna centerposition erhålls en precis 3D-grepposition och lutningen på paketets överyta, vilket sedan kan vägleda robotens sugkopp eller gripdon.
Hantera tilltryckta och utbuktande paket
Riktiga paket är inte perfekta block: bubbelinslagna påsar sjunker ihop, mjuka påsar buktar ut och kartonglådor kan deformeras under belastning. Ett enkelt antagande om en platt yta skulle misslyckas i dessa fall. För att hantera detta utökar författarna sin matematik för att skilja mellan tre situationer: nästan plana paket, konvexa (utbuktande) toppar och konkava (ihop-sjunkna) ytor. Genom att jämföra högsta och lägsta djupvärden på ett pakets yta beslutar systemet först om det är signifikant deformerat. Om så är fallet analyserar det hur den deformerade ytan skär ett föreställt referensplan och passar en approximativ ellips till den korsningen. Utifrån detta löser det för ett "optimalt" plan som bäst representerar en stabil greppyta—even om den verkliga överytan sjunker eller buktar—och projicerar sedan tillbaka nyckelgreppunkten på det planet.
Sätta algoritmen på prov
För att kontrollera om matematiken fungerar i praktiken byggde teamet ett testbänk med en sexaxlig industrirobot, en 3D-kamera och en specialbyggd laser-och-probstyrning. Först markerade de det sanna geometriska centrumet av varje testpakets överyta och använde två laserstrålar för att precisera den fysiska platsen i rummet. Därefter lät de sin visionsalgoritm beräkna sin egen uppskattning av samma centrum och kommenderade roboten att föra en andra prob till den beräknade punkten. Genom att mäta den lilla förskjutningen mellan de två probspetsarna kunde de beräkna positionsfelet. Tester med både stela trälådmodeller och realistiska förpackningsmaterial—wellpappkartonger, bubbelkuvert och plastpåsar, i storlekar upp till 250×250 mm—visade ett maximerat positionsfel på omkring 1,7 millimeter och genomsnittliga fel nära 1 millimeter per axel. Full beräkning för varje paket tog ungefär 17,5 millisekunder, tillräckligt snabbt för höga genomflödes sorteringslinjer.
Vad detta betyder för framtidens lager
Enkelt uttryckt visar studien att en robot utrustad med en 3D-kamera och denna trepunkts-, projektionbaserade algoritm pålitligt kan lista ut var och hur man ska gripa paket från en rörig behållare med millimeternoggrannhet. Även om stark deformation i mycket mjuka paket fortfarande minskar noggrannheten något, förblir metoden tillräckligt robust för realistiska lagerförhållanden. I takt med att paketvolymerna fortsätter att öka och arbetskraftsbristen består, kan sådana algoritmer möjliggöra säkrare, mindre monotona arbeten genom att flytta de tyngsta och mest repetitiva sorteringsuppgifterna från människor till maskiner—samtidigt som de hjälper till att hålla den växande e-handelsvärlden i rullning.
Citering: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Nyckelord: 3D-vision, paketsortering, robotplockning, logistikautomation, objektlokalisering