Clear Sky Science · sv
Provprovtagna fuzzy $$H_\infty$$-estimatorer för reglering av icke‑linjära parabolisk partiella differentialekvationer
Hålla komplexa system i balans
Många fysikaliska och biologiska system — såsom värmeledning i en metallstång, spridning av kemikalier i en reaktion eller signaler som färdas genom vävnad — förändras både över tid och i rummet. Dessa system kan vara svåra att hålla stabila, särskilt när verkliga störningar och brus är närvarande. Denna artikel presenterar ett nytt sätt att utforma digitala regulatorer som håller sådana system stabila och motståndskraftiga mot störningar, samtidigt som de är tillräckligt praktiska för att implementeras på moderna datorer och mikrokontroller.
Varför både rum och tid spelar roll
I vardagliga reglerproblem modellerar ingenjörer ofta ett system med ordinära differentialekvationer, där variabler endast beror på tiden. Men många viktiga fenomen — från temperatur i en ugn till koncentrationer i en reaktor — beror också på position. Dessa beskrivs bättre av partiella differentialekvationer, som följer hur storheter utvecklas i både rum och tid. Sådana modeller är kraftfulla men matematiskt krävande, särskilt när det underliggande beteendet är icke‑linjärt och påverkas av slumpmässiga störningar och mätbrus.
Från fuzzyregler till en hanterbar modell
För att tygla denna komplexitet använder författarna en fuzzy‑modellram som är känd som Takagi–Sugeno (T–S)-ansatsen. Istället för att arbeta direkt med en enda komplicerad icke‑linjär ekvation approximerar de systemet genom att mjukt väga ihop flera enklare linjära modeller, vardera giltig i ett lokalt driftområde. Dessa delar kopplas samman via fuzzy „if–then“‑regler, vilket omvandlar ett svårhärskat icke‑linjärt partiellt differentialsystem till en strukturerad familj av linjära system. Forskarna tar noggrant hänsyn till de små fel som introduceras av denna approximation och säkerställer att dessa inte underminera stabilitet eller prestanda.
Digital reglering som sampelar i tid
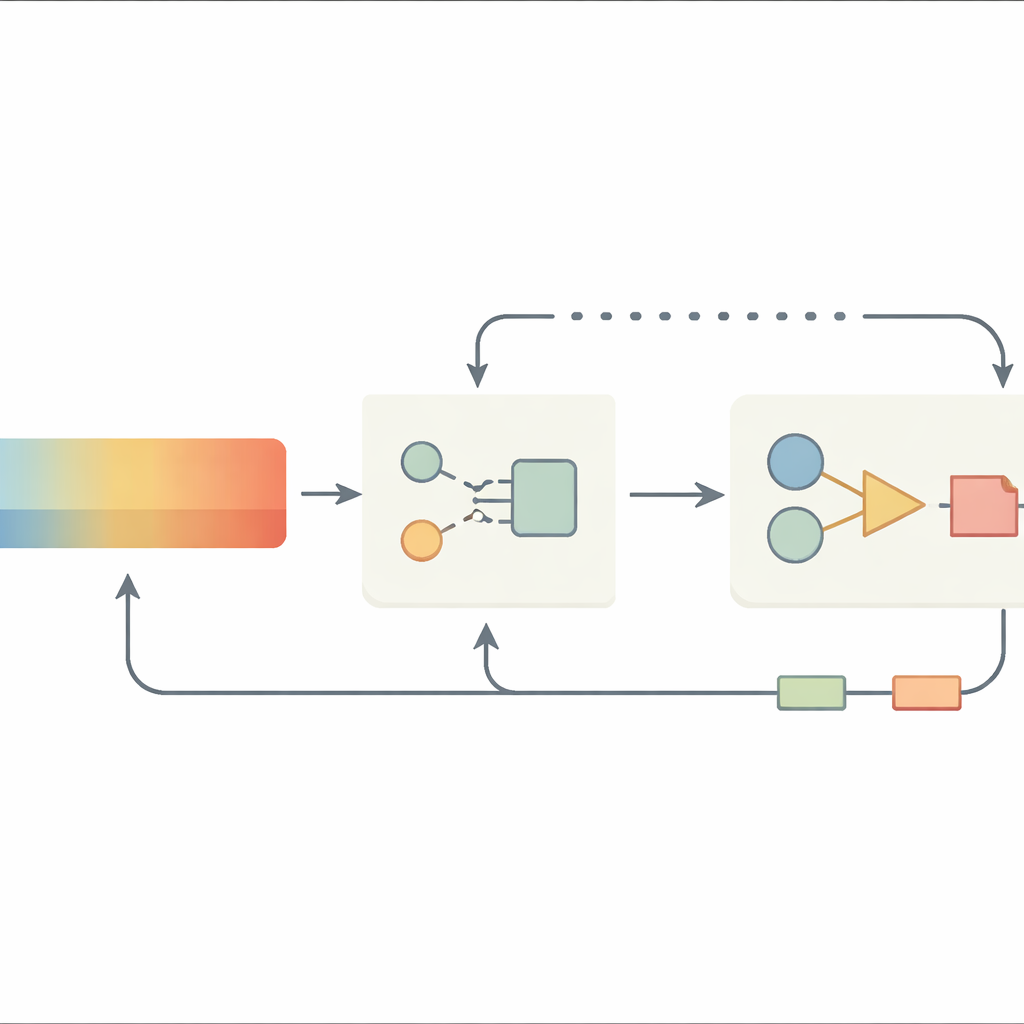
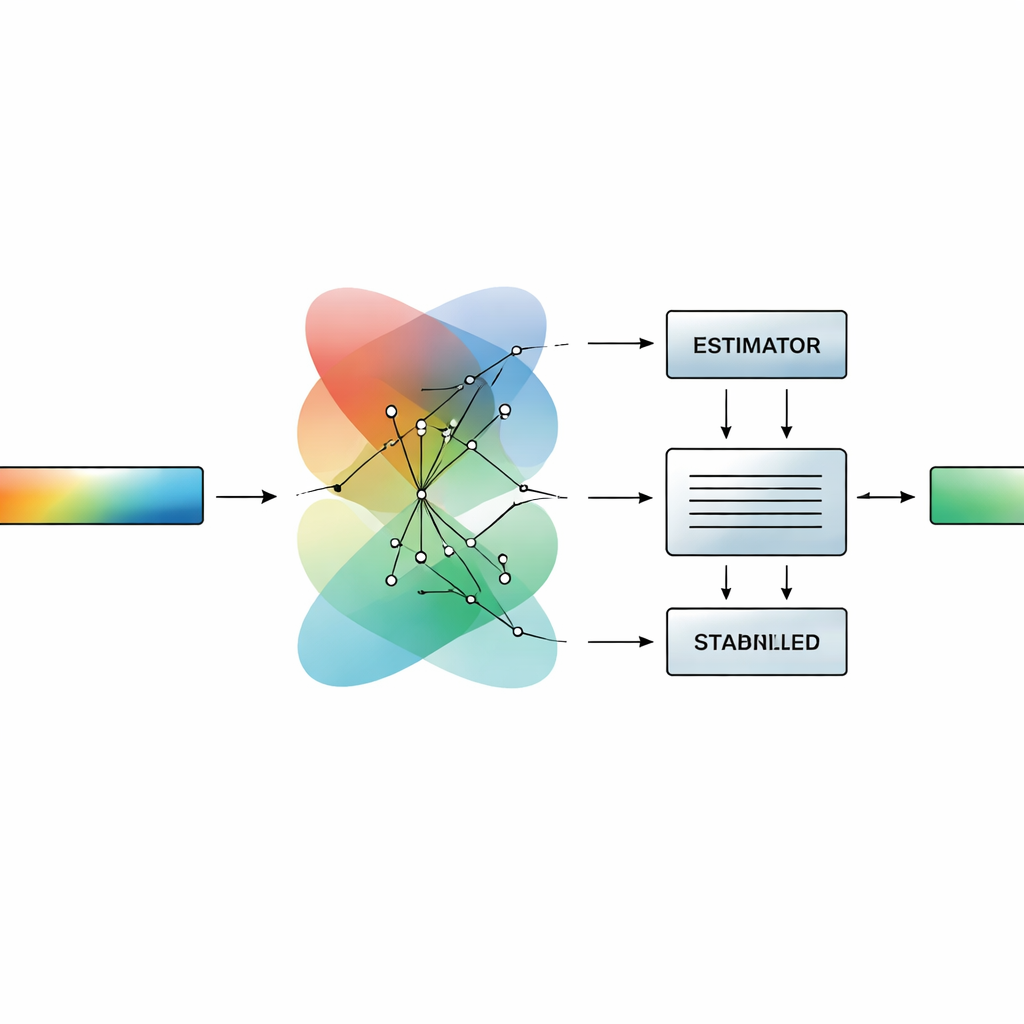
Moderna regulatorer implementeras vanligtvis på digital hårdvara, som uppdaterar styråtgärder vid diskreta tidpunkter i stället för kontinuerligt. Detta ”sampled‑data”‑beteende kan i sig medföra utmaningar, såsom fördröjningar och abrupta förändringar mellan uppdateringar. Artikeln utformar en regulator som explicit tar hänsyn till denna samplede natur. Den bygger på en estimator som rekonstruerar det distribuerade systemets inre tillstånd från brusiga mätningar, samt en fuzzy återkopplingslag som beräknar styrsignalen vid varje samplingstillfälle. Genom att behandla samplingens effekt som en tidsfördröjning i styrkanalen bygger författarna ett matematiskt ramverk som fångar hur dessa digitala uppdateringar samspelar med de rumsligt distribuerade dynamikerna.
Säkerställa robust prestanda
Verkliga system är aldrig helt tysta: yttre störningar, sensorspridning och modellosäkerheter kan alla försämra prestanda. För att hantera detta antar författarna ett H‑infinity‑liknande prestandamått, som kräver att regulatorn håller störningarnas påverkan under en föreskriven nivå för alla tillåtna brussignaler. Med moderna verktyg från stabilitetsteorin — såsom Lyapunov‑funktionaler, integrala olikheter och en formel som hanterar diffussionstermer — härleder de villkor under vilka sluten krets‑systemet inte bara är stabilt över tid utan också robust mot störningar. Avgörande uttrycker de dessa villkor som linjära matrixolikheter, ett standardiserat optimeringsformat som effektivt kan kontrolleras och lösas med färdiga verktyg som MATLAB:s LMI‑toolbox.
Test av metoden på en oscillerande kemisk reaktion
För att visa att teorin fungerar bortom handräkning tillämpar författarna sin metod på Belousov–Zhabotinsky‑reaktionen, ett klassiskt oscillerande kemiskt system vars vågor påminner om de som finns i biologisk vävnad såsom hjärtat. De modellerar reaktionen som en rumsligt distribuerad process och utformar därefter en sampled‑data fuzzy‑estimator och regulator med hjälp av sina föreslagna kriterier. Numeriska simuleringar visar att regulatorn driver systemet mot ett stabilt beteende, både utan störningar och i närvaro av betydande yttre brus. Metoden överträffar också flera tidigare angreppssätt vad gäller den störningsnivå den kan tolerera samtidigt som stabiliteten bibehålls.
Vad detta betyder i praktiken
Enkelt uttryckt visar detta arbete hur man utformar en digital regulator som pålitligt kan stabilisera komplexa processer spridda i rummet, även när systemet är icke‑linjärt och påverkat av brus. Genom att kombinera fuzzy‑modellering, en estimator för att rekonstruera dolda tillstånd och ett robust prestandamått ger författarna en receptliknande metod som ingenjörer kan implementera med standard numeriska verktyg. Detta öppnar dörren för mer tillförlitlig reglering av processer från kemiska reaktorer till avancerade termiska och biologiska system, alla med regulatorer som körs effektivt på modern digital hårdvara.
Citering: Sivakumar, M., Dharani, S. & Cao, J. Sampled-data fuzzy \(H_\infty\) estimators for control of nonlinear parabolic partial differential equations. Sci Rep 16, 9010 (2026). https://doi.org/10.1038/s41598-026-37959-0
Nyckelord: fuzzystyrning, sampled‑data‑system, utbredningssystemsparametrar, robust stabilisering, Belousov–Zhabotinsky‑reaktion