Clear Sky Science · sv
Omkonfigurerbar analys och arbetsrumsoptimering av modulär kabelupphängd parallellrobot
Robotar som rör sig på osynliga rälsar
Föreställ dig en robot som kan glida med en tung kamera över en arena, lyfta byggmaterial över en byggarbetsplats eller styra en rehabiliteringsapparat runt en patient — allt medan den hänger i kablar i stället för att färdas på styva armar. Denna artikel presenterar en ny typ av kabelupphängd robot vars struktur kan ändras vid behov, så att en och samma maskin kan anpassas till många olika uppgifter samtidigt som den utnyttjar sitt arbetsrum på bästa sätt.
Bygga en robot av utbytbara delar
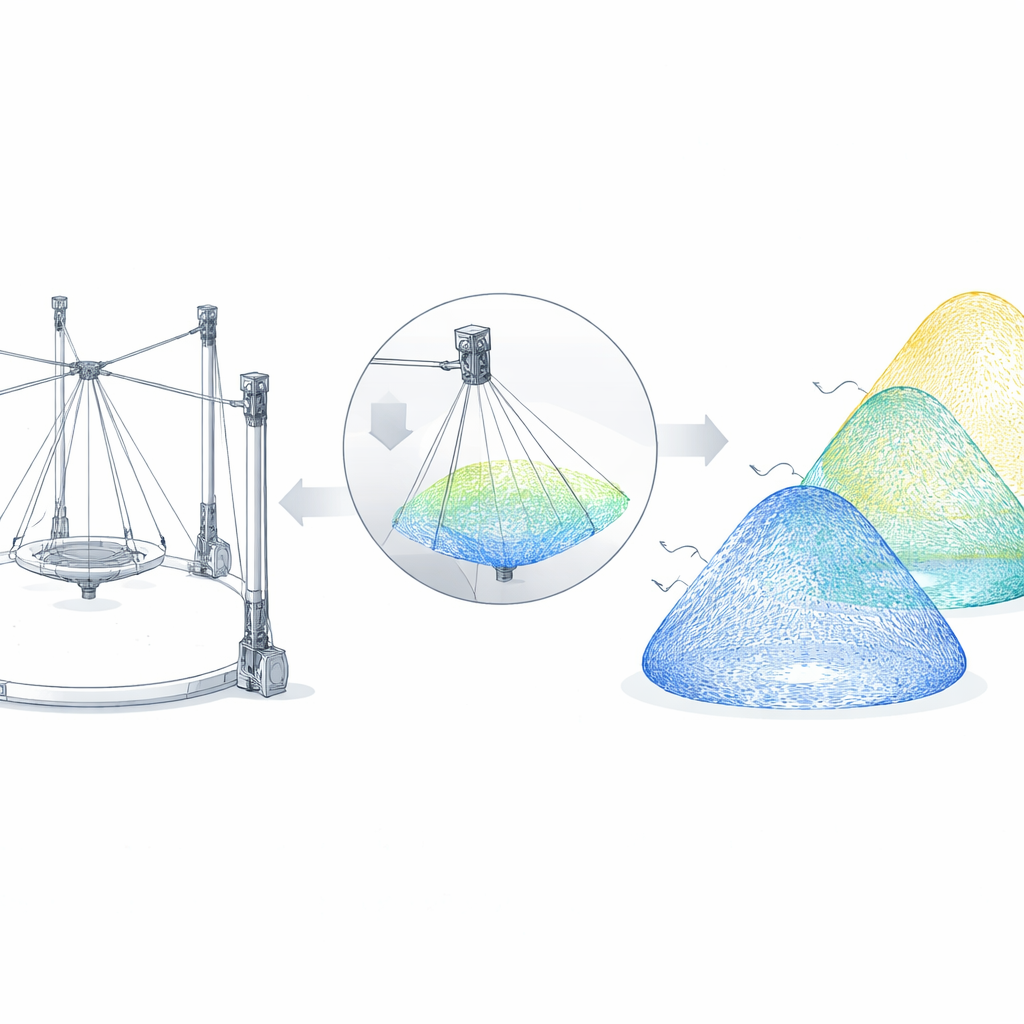
Kärnan i studien är en modulär kabelupphängd parallellrobot (MCSPR). I stället för fasta metallarmar används upp till sex identiska ”grenar”, var och en en pelare med motorer, trissor och en kabel som förbinder dem med en central rörlig plattform, kallad ändeffektor. Dessa grenar placeras runt en cirkulär led och kan läggas till, tas bort, roteras eller höjas och sänkas. Genom att omorganisera dem kan samma hårdvara bete sig som flera olika robotar: med två grenar rör den sig i ett plan, med tre eller fyra rör den sig fritt i rummet, och med fem eller sex kan den även tilta och rotera plattformen i flera riktningar.

Planera skelettet för en formföränderlig maskin
Att utforma ett sådant flexibelt system handlar inte bara om att bulta ihop delar. Författarna använder ett systematiskt tillvägagångssätt de kallar ”strukturell syntes”, där varje kabel, trissa och led behandlas som byggstenar i ett nätverk. Med diagram som påminner om grafer kartlägger de hur dessa element kopplas så att plattformen får de önskade rörelsefriheterna — till exempel att förskjutas längs tre axlar eller rotera kring dem. Denna katalog av moduler och kopplingar fungerar som ett desigverktyg: beroende på vilken rörelse en uppgift kräver kan en konstruktör välja hur många grenar som ska användas och var de ska placeras på den cirkulära ledens bana, med trygghet i att den resulterande strukturen uppför sig som avsett.
Veta åt vilket håll plattformen kommer att röra sig
Eftersom plattformen hänger i kablar som endast kan dra, inte trycka, är förutsägelsen av dess rörelser mer invecklad än för traditionella robotar. Teamet utvecklar en enhetlig matematisk beskrivning som täcker alla fem huvudkonfigurationer av MCSPR. Givet en önskad position och orientering för plattformen beräknar de exakt hur lång varje kabel måste vara och hur snabbt dess längd ska förändras. De bygger sedan en fysisk prototyp och låter plattformen följa en jämn spiralbana i rummet. Sensorer längs kablarna registrerar de faktiska rörelserna, vilka stämmer väl överens med de förutsagda. Detta bekräftar att modellen pålitligt kan styra roboten även när dess geometri omkonfigureras.
Hitta var roboten säkert kan stå stilla
Lika viktigt är att förstå var den upphängda plattformen kan vara i jämvikt. Om någon kabel blir slapp förloras kontrollen. Författarna fokuserar på vad de kallar det statiska jämviktsarbetsrummet: den del av rymden där alla kablar kan bibehålla positiv spänning medan endast tyngdkraften verkar på plattformen. Genom en Monte Carlo‑metod slumpar de många möjliga plattformspositioner och orienteringar och kontrollerar för varje om de kabelspänningar som krävs för att hålla den givetvis pose ligger inom säkra gränser. De accepterade proverna bildar ett tredimensionellt moln som skisserar det tillgängliga arbetsvolymen för roboten.
Förlänga robotens räckvidd med smart anpassning
Eftersom MCSPR:s grenar kan ändra höjd och vinkel, och plattformen kan bära laster med olika massor och tiltvinklar, är storleken och formen på denna säkra volym inte fixerad. Forskarna varierar systematiskt dessa faktorer i en sexgrensuppställning. De visar att en tyngre last kraftigt krymper området där roboten kan stå stilla, medan genomtänkta val av grenhöjder och vinkelspridning kan förstora det. De formulerar sedan ett optimeringsproblem: justera last, grenhöjder, grenvinklar och plattformens tiltomfång för att maximera volymen av det säkra arbetsrummet. Genom att köra denna sökning i programvara hittar de en konfiguration där det nåbara, balanserade rummet är flera gånger större än i en enkel utformning.
Varför detta är viktigt för verkliga tillämpningar
För en icke‑specialist är huvudbudskapet att denna robot kan omformas nästan som ett byggsats, men ändå analyseras och finjusteras med precision. Genom att kombinera modulär hårdvara med noggrann matematisk planering och datorbaserad sökning förvandlar författarna en enskild kabelupphängd maskin till en mångsidig plattform som kan anpassas till många uppgifter — från precisionsproduktion till rehabilitering — samtidigt som den utnyttjar sitt arbetsrum maximalt och håller laster säkert understödda.
Citering: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Nyckelord: kabelrobotar, modulär robotik, omkonfigurerbara mekanismer, robotarbetsrum, parallella manipulatorer