Clear Sky Science · sv
Den förbättrade EME‑YOLOv11 för realtidsdetektion av polariseringsfel
Varför små defekter i skärmar verkligen spelar roll
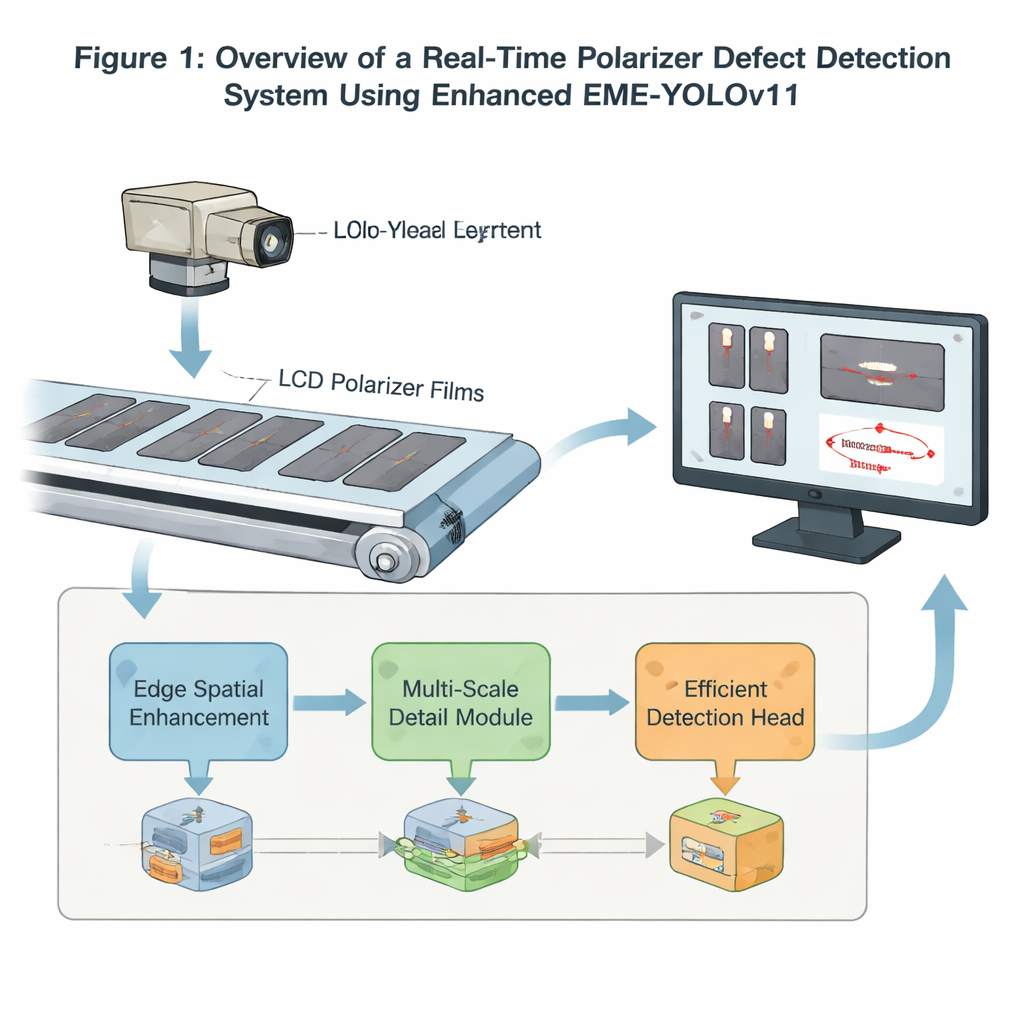
Varje smartphone-, laptop- och TV-skärm förlitar sig på en tunn optisk film som kallas polariserare för att styra hur ljus passerar genom displayen. Om den filmen har även små prickar, fläckar eller repor kan bildkvaliteten försämras och hela paneler kan behöva kasseras. Idag förlitar sig de flesta fabriker fortfarande i stor utsträckning på mänskliga inspektörer eller äldre bildbehandlingsmetoder för att hitta dessa fel, vilket är långsamt, tröttande och inte alltid tillförlitligt. Denna studie presenterar ett smartare, snabbare artificiellt intelligenssystem — kallat EME‑YOLOv11 — som är utformat för att upptäcka dessa defekter i realtid medan paneler rullar längs produktionslinjen.
Från mänskliga ögon till maskinögon
I flytande kristallskärmsindustrin (LCD) är polariseraren en nyckelkomponent som starkt påverkar ljusstyrka, kontrast och betraktningsvinkel. Vanliga defekter — såsom blåsor, fläckar, främmande partiklar eller verktygsmärken — kan vara bara en bråkdel av en millimeter breda, men ändå försämra en skärm eller göra den oanvändbar. Traditionell inspektion byggde på att arbetare visuellt skannade paneler, men människor har svårt att upptäcka svaga eller mycket små fel under långa perioder, och deras bedömningar varierar med erfarenhet och trötthet. Tidiga maskinsynsystem förbättrade detta genom att använda kameror och handgjorda regler för att mäta former, texturer eller gråtoner. Dessa regelbaserade metoder fallerar dock när defektformer förändras, kontrasten är låg eller bakgrunderna är komplexa — förhållanden som ofta förekommer med polariseringsfilmer.
Låta neurala nätverk lära sig vad som är viktigt
Djupinlärning, och särskilt konvolutionella neurala nätverk, har transformerat hur datorer tolkar bilder genom att lära sig användbara särdrag direkt från data istället för att förlita sig på manuellt utformade regler. Inom detta område har YOLO ("You Only Look Once")‑familjen blivit en arbetsmotor för realtidsobjektdetektion genom att balansera hastighet och noggrannhet i ett enda änd‑till‑änd‑ramverk. Författarna bygger vidare på den senaste YOLOv11‑modellen, som redan är optimerad för snabb detektion, och anpassar den särskilt för polariserarinspektion. Målet är att öka modellens känslighet för subtila defekter, hålla den tillräckligt lätt för industriell användning och samtidigt bearbeta bilder tillräckligt snabbt för att hinna med rörliga produktionslinjer.
Höja kontrasten på kanter och zooma in på fina detaljer
Den första viktiga förbättringen fokuserar på hur nätverket ser kanter och rumsliga mönster. Författarna ersätter en standardmodul i YOLOv11:s backbone med en ny modul som kör två grenar parallellt: en gren använder en Sobel‑operator — ett effektivt, klassiskt kantfilter — för att betona skarpa intensitetsförändringar, och den andra använder vanliga konvolutioner för att bevara bredare texturer och strukturer. Genom att förena dessa två vyer och föra dem framåt blir systemet bättre på att framhäva de svaga gränserna hos fläckar och märken som annars kan smälta in i bakgrunden. En andra modul skriver om hur nätverket betraktar detaljer på olika skalor. Istället för pooling, som kan tvätta bort subtila variationer, använder författarna dilaterade konvolutioner med flera noggrant valda mellanrum. Detta gör att modellen kan fånga både små, lokala särdrag och bredare kontext utan att antalet parametrar exploderar, vilket hjälper den att känna igen små, oregelbundna defekter såväl som större.
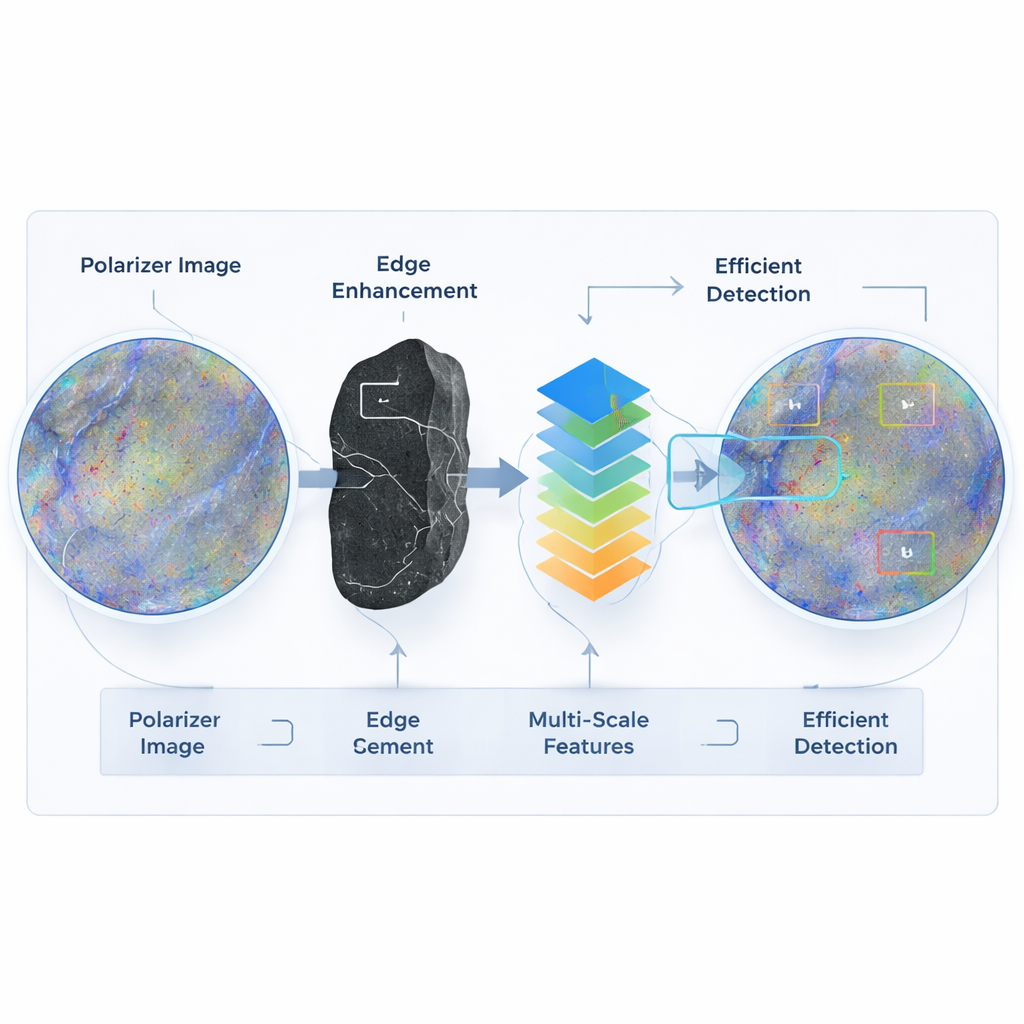
Snabbare beslut med ett slankare detekteringshuvud
I nätverkets utgångsdel omvandlar ett omdesignat "huvud" funktionskartor till konkreta förutsägelser om var defekter finns och vilken typ de är. Författarna omorganiserar denna del i tre upplösningsnivåer — fin för små fel, medel för typiska defekter och grov för större — och byter ut standardkonvolutioner mot grupperade konvolutioner, som delar upp beräkningarna i mindre, parallella delar. Huvudet separerar också klassificering (vilken typ av defekt) från boxförfining (exakt position). Denna kombination minskar antalet beräkningar och modellens storlek samtidigt som noggrannheten förbättras. I tester på en verklig fabrikssats med nästan 4 000 polariserarbilder överträffade den förbättrade EME‑YOLOv11 inte bara den ursprungliga YOLOv11 utan också andra populära end‑stage och transformerbaserade detektorer, genom att uppnå högre precision och återkallning med färre flyttalsoperationer och färre parametrar.
Vad detta betyder för vardagliga skärmar
Enkelt uttryckt är EME‑YOLOv11 ett smartare och mer effektivt uppsättning "maskinögon" för polariserarinspektion. Genom att skärpa kanter, bevara fina detaljer och effektivisera beslutslagren hittar det fler verkliga defekter samtidigt som det är tillräckligt snabbt för verklig fabriksanvändning. Även om de nuvarande testerna kördes på ett högpresterande grafikkort pekar den kompakta designen mot framtida utplacering på inbyggda enheter installerade direkt på produktionslinjer. Om sådana system blir allmänt använda kan tillverkare kasta färre paneler, stabilisera kvaliteten och sänka kostnaderna — allt som i förlängningen förbättrar tillförlitligheten och utseendet hos de skärmar människor använder varje dag.
Citering: Liu, R., Jing, C., Zhang, T. et al. The enhanced EME-YOLOv11 for real-time polarizer defect detection. Sci Rep 16, 7414 (2026). https://doi.org/10.1038/s41598-026-37884-2
Nyckelord: polariseringsfel, industriell inspektion, djupinlärning, YOLO objektdetektion, maskinsyn