Clear Sky Science · sv
En realtidslösning för industrisäkerhetsautomation med YOLO-arkitekturer som utnyttjar olika kromatiska domäner
Smartare blickar på fabriksgolvet
Dolda fel i metallsvetsar kan förvandla robusta maskiner, broar eller rörledningar till tysta faror. Traditionellt granskar utbildade inspektörer glödande svetsfogar för att försöka hitta små sprickor eller glipor innan de leder till olyckor. I denna artikel undersöks hur artificiell intelligens kan ta över mycket av detta vakande arbete genom snabb bildigenkänningsprogramvara som i realtid granskar svetsar, även när detaljer passerar på ett transportband. Genom att jämföra flera versioner av en populär AI-detektor kallad YOLO och testa hur olika sätt att återge färg påverkar dess syn visar forskarna en väg mot säkrare och mer effektiva fabriker.
Varför det är så svårt att upptäcka dåliga svetsar
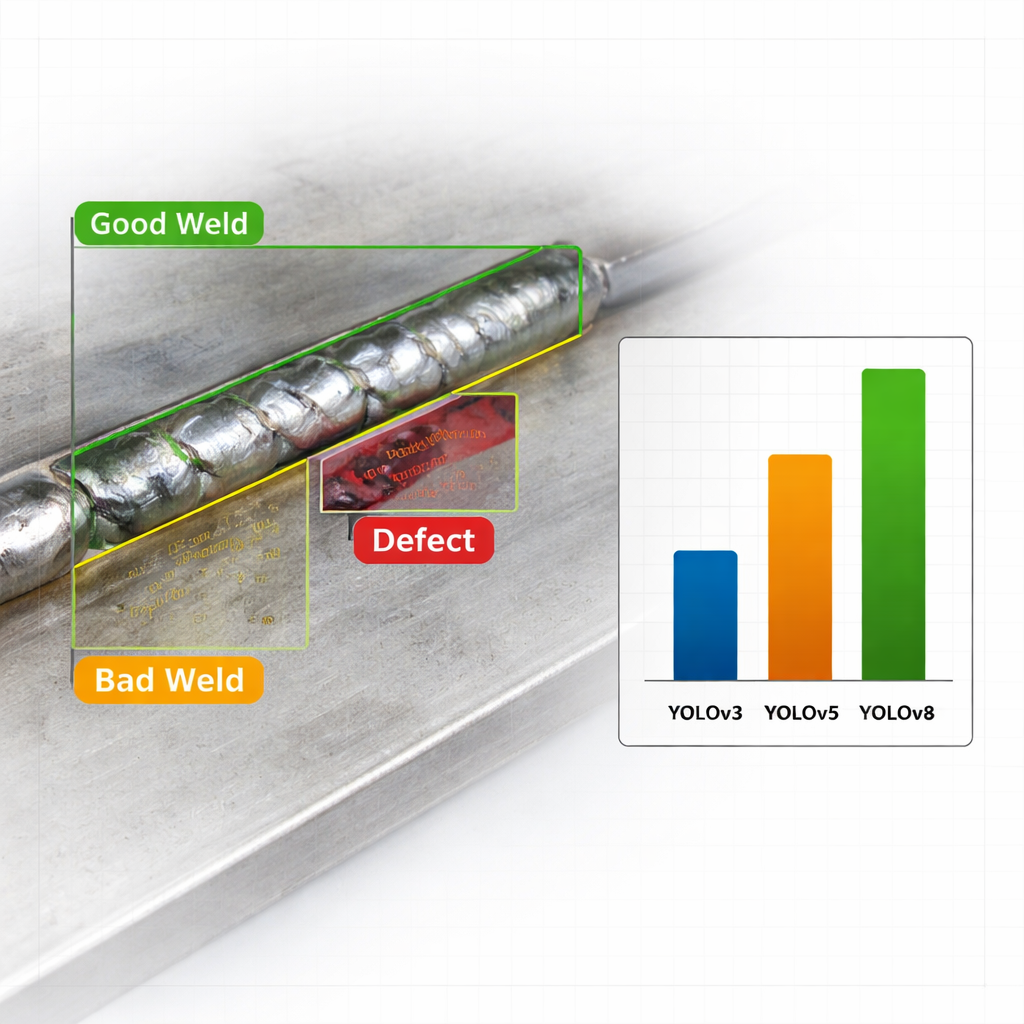
På en upptagen produktionslinje varierar svetsar i form, glans och bakgrundstörningar. En enskild bild kan innehålla flera svetsar och defekter, vilket gör enkel bildklassificering ("bra" eller "dålig" totalt sett) alltför grov. Istället måste systemet både hitta och märka specifika problemområden längs en fog. Författarna fokuserar på tre praktiska kategorier — bra svets, dålig svets och uppenbar defekt — eftersom varje kategori kräver olika åtgärder, från att acceptera en detalj till omedelbar ombearbetning. De använder en publikt tillgänglig datamängd med mer än sex tusen annoterade svetsbilder, vilket säkerställer att AI:n tränas och testas på ett realistiskt spektrum av ytor, ljusförhållanden och felskador.
Att lära maskiner att titta en gång och besluta
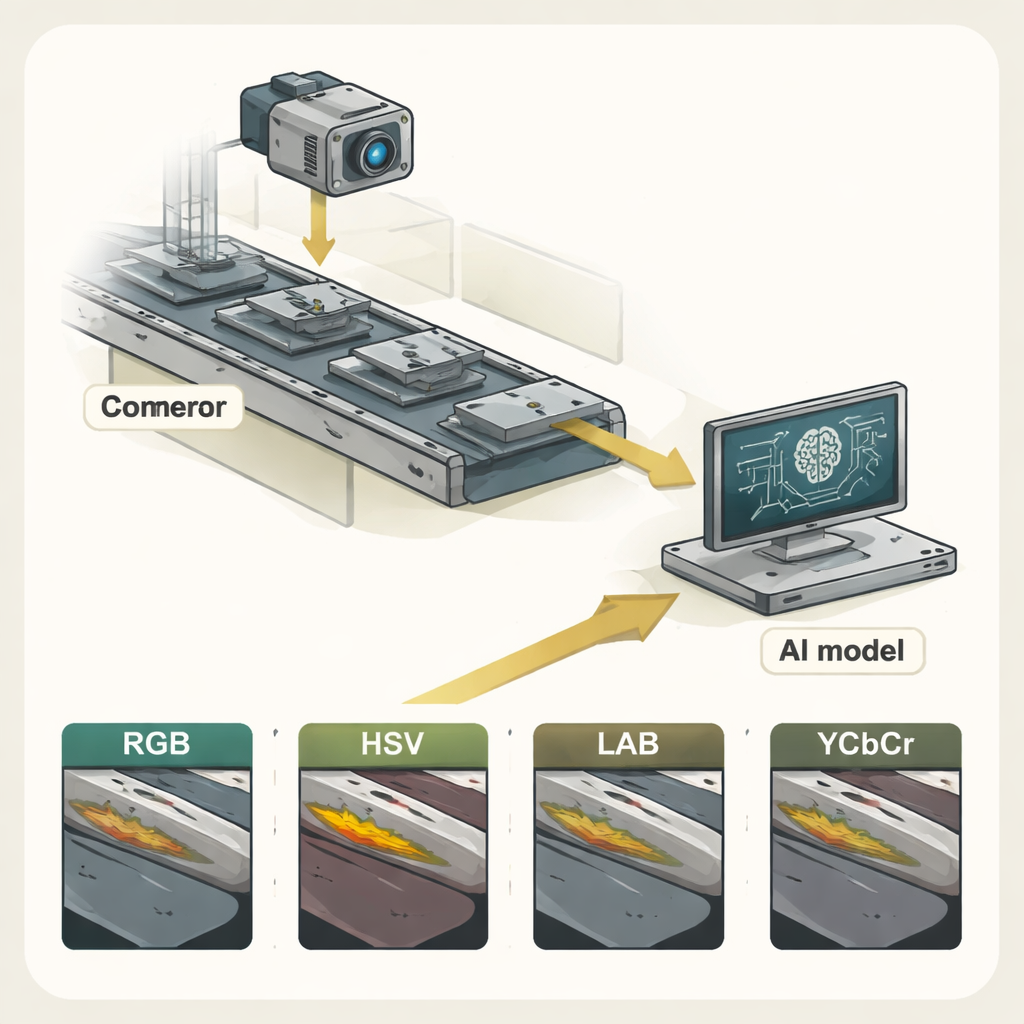
Studien kretsar kring YOLO ("You Only Look Once")-familjen av objekt‑detektionsmodeller, kända för att skanna en bild i ett enda pass och rita rutor runt det de hittar. Forskarna jämför tre generationer: YOLOv3, YOLOv5 och den senaste YOLOv8. Varje version förbättrar hastighet och noggrannhet genom djupare nätverk och smartare träningsstrategier. För att bättre efterlikna ljusutmaningarna i verkliga fabriker omvandlar teamet också varje svetsbild till fyra olika färgrymder — RGB (det välkända röd–grön–blå), HSV, LAB och YCbCr — och tränar separata modeller för var och en. Detta multispektrala angreppssätt låter dem ställa en riktad fråga: hjälper en annan färgkodning AI:n att se defekter tydligare?
Färg, hastighet och noggrannhet i praktiken
I samtliga experiment framträder ett tydligt mönster: den nyaste modellen, YOLOv8, överträffar sina föregångare. När den tränas på standard RGB-bilder uppnår YOLOv8 en normaliserad medelprecision (mAP@0.5) på 0,592, märkbart högre än YOLOv3 och YOLOv5 under samma förutsättningar. I praktiska termer innebär detta att den är bättre både på att hitta och korrekt märka svetsområden. Modellen är dessutom mycket snabb och bearbetar ungefär 138 bilder per sekund på ett modernt grafikkort — långt över de 30 bilder per sekund som ofta används som ett realtidsperspektiv. Bland färgrymderna ger RGB konsekvent de bästa resultaten för samtliga tre YOLO-versioner, medan HSV, LAB och YCbCr hamnar efter. Dessa alternativa kodningar kan framhäva vissa visuella egenskaper, men i detta sammanhang överväger de inte enkelheten och informationsinnehållet i RGB.
Från laboratorietester till fabrikskanten
För att visa verklig genomförbarhet distribuerar författarna en strömlinjeformad YOLOv8-modell på en Raspberry Pi-baserad edge‑enhet kopplad till ett transportband och en kamera. När svetsade delar rör sig under linsen fångar systemet ramar, förbehandlar dem enkelt och kör detektion lokalt och klassificerar varje svets som bra, dålig eller defekt. Resultaten loggas i en databas och visas på en instrumentpanel för inspektörer som kan se live-markeringar för defekter och långsiktiga kvalitetsmönster. Utöver det kan ramverket generera rekommendationer, till exempel föreslå justeringar av svetsningshastighet eller spänning, eller flagga när utrustningsunderhåll kan behövas baserat på återkommande defekter.
Vad detta betyder för säkrare tillverkning
För en lekman är huvudresultatet enkelt: arbetet visar att en lätt, modern AI‑modell pålitligt och mycket snabbt kan markera riskfyllda svetsar i verkliga industriförhållanden, särskilt när den använder vanliga RGB-kamerabilder. YOLOv8 visar sig vara tillräckligt exakt för att klart skilja ut tydligt dåliga svetsar och tillräckligt snabb för att hänga med i högfartslinjer, samtidigt som den körs på modest hårdvara nära maskinerna. Författarna menar att denna typ av automatiserad, färgmedveten inspektion kan minska mänskliga fel, upptäcka problem tidigare och stödja säkrare och mer konsekvent tillverkning. Framtida förbättringar — såsom rikare träningsdata och bättre hantering av mer subtila defekttyper — kan göra dessa digitala inspektörer till en vardaglig del av industrisäkerheten.
Citering: Pati, N., Sharma, A., Gourisaria, M.K. et al. A real-time industrial safety automation using YOLO architectures leveraging diverse chromatic domains. Sci Rep 16, 7253 (2026). https://doi.org/10.1038/s41598-026-37869-1
Nyckelord: svetsdefektdetektering, industrisäkerhetsautomation, YOLOv8, realtidsdatorseende, edge-AI