Clear Sky Science · sv
Autonom planering av banor för interkostal robotiserad ultraljudsbildgivning med hjälp av förstärkningsinlärning
Robotar som hjälper läkare att se genom revbenen
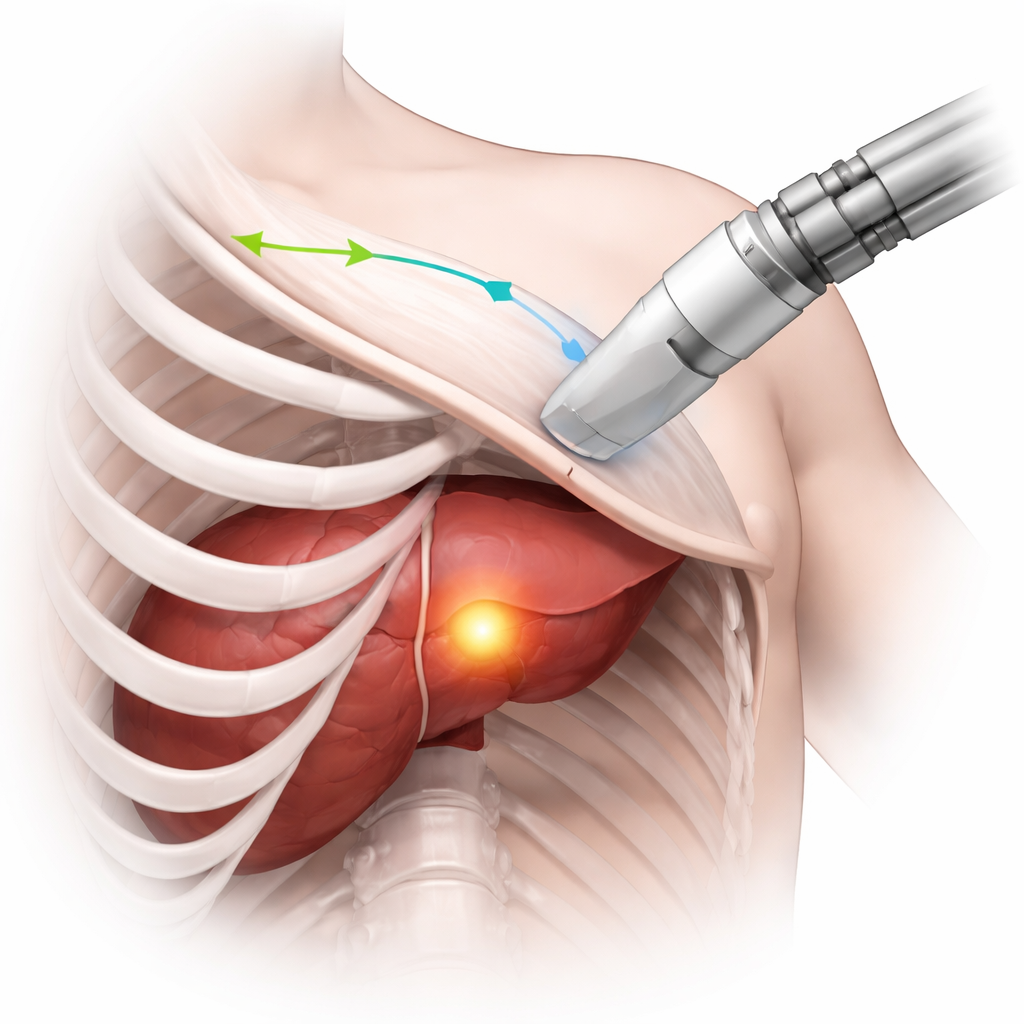
När läkare använder ultraljud för att övervaka organ som levern eller hjärtat står revbenen ofta i vägen och skapar mörka skuggor som döljer viktiga detaljer. Att få en tydlig bild beror i hög grad på färdigheten och erfarenheten hos den som håller proben. Den här studien undersöker hur en robot, styrd av artificiell intelligens, automatiskt kan planera en ultraljudsskanningsbana mellan revbenen så att tumörer och andra mål syns tydligt och konsekvent, oavsett vem som manövrerar apparaten.
Varför det är så svårt att se mellan revbenen
Ultraljud är populärt eftersom det är säkert, prisvärt och ger bilder i realtid. Men för att avbilda organ som ligger bakom bröstkorgen måste proben styras försiktigt genom de smala springorna mellan revbenen. Om ljudvågorna träffar ben blockeras de, vilket skapar stora svarta områden i bilden där inget kan ses. Mänskliga operatörer lär sig genom träning och erfarenhet hur de ska vinkla och flytta proben för att undvika dessa skuggor samtidigt som intresseområdet hålls i bild. Detta är särskilt viktigt vid ingrepp som behandling av levertumörer, där kirurger måste upprepade gånger kontrollera att hela tumören har behandlats. Utmaningen är att förvandla denna känsliga tredimensionella färdighet till något en robot kan göra självständigt.
Att lära en robot med virtuella patienter
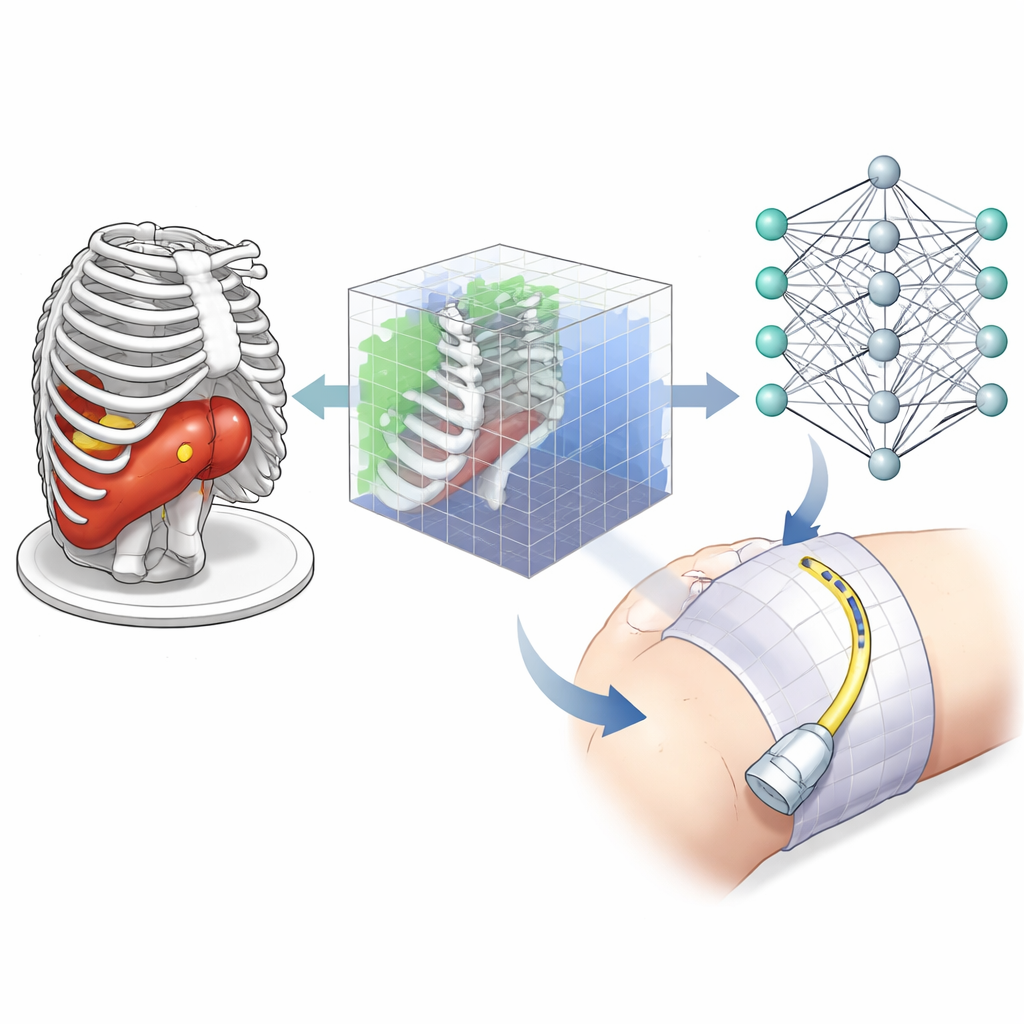
I stället för att lära direkt från brusiga och varierande ultraljudsbilder byggde forskarna en virtuell träningsmiljö med hjälp av datortomografiska (CT) skanningar. CT erbjuder en skarp tredimensionell karta över ben, hud och lever, och tumörer kan läggas till i olika former och positioner för att skapa många realistiska scenarier. I denna simulator rör sig en virtuell ultraljudsprobe över hudytan ovanför revbenen, och ultraljudsstrålarnas banor modelleras som strålar som passerar genom mjukvävnad men blockeras av ben. Denna enkla men realistiska modell berättar för systemet vilka delar av en tumör som är synliga, hur mycket ljudet försvagas på vägen och var skuggorna uppstår.
Hur inlärningssystemet bestämmer var det ska skanna
Teamet använde en form av artificiell intelligens kallad förstärkningsinlärning, där en "agent" lär sig genom trial-and-error att välja handlingar som leder till högre belöningar. Vid varje steg ser agenten en kompakt 3D-representation av scenen runt tumören: vilka små volymelement som innehåller tumör, vilka som innehåller ben och vilka som korsas av de simulerade ultraljudsstrålarna. Den kan sedan flytta eller luta den virtuella proben i små steg, eller växla mellan ett "utforska"-läge och ett "inspelning"-läge som används för att bygga den slutliga 3D-vyn. Den belöning den får kombinerar tre mål: att täcka så stor del av målvolymen som möjligt, att hålla proben tillräckligt nära för att minska signalförlust, och att undvika områden där strålar blockeras av ben, vilket skulle skapa värdelösa skuggade bilder.
Att pröva metoden
För att se om den inlärda strategin generaliserar bortom sina träningsexempel testade forskarna den på nya CT-skanningar och nya tumörformer som agenten aldrig tidigare stött på. I dessa försök ansågs en skanningsplan vara framgångsrik om minst 95 % av målvolymen avbildades inom ett begränsat antal steg. För små, medelstora och stora mål uppnådde systemet framgångsfrekvenser upp till 95 %, samtidigt som en hög andel skuggfria vyer och rimliga avstånd mellan probe och tumör bibehölls. Metoden fungerade också när det fanns flera mål att täcka, till exempel kvarvarande tumörfläckar utspridda i levern, även om prestandan naturligtvis sjönk något när uppgiften blev mer komplex.
Från simulering till operationssalen
För närvarande fokuserar arbetet på att planera banan snarare än att fysiskt flytta en verklig robot. Banorna genereras på patient-specifika CT-skanningar eller på generiska CT-"atlaser" som senare kan matchas till en individs anatomi med befintliga registreringstekniker. I framtiden är avsikten att denna planeringsmodul ska kombineras med robotkontroll, rörelsekompensation för andning och mer realistisk simulering av ultraljudsbilder. För en lekman är huvudbudskapet att detta tillvägagångssätt kan göra ultraljudsövervakning under ingrepp som behandling av levertumör mer pålitlig och mindre beroende av operatörens skicklighet, genom att låta en robot hitta smarta, skuggfria vägar mellan revbenen så att hela målet hålls i bild.
Citering: Bi, Y., Qian, C., Zhang, Z. et al. Autonomous path planning for intercostal robotic ultrasound imaging using reinforcement learning. Sci Rep 16, 6356 (2026). https://doi.org/10.1038/s41598-026-37702-9
Nyckelord: robotiserat ultraljud, förstärkningsinlärning, avbildning av levertumör, interkostal skanning, medicinsk robotik