Clear Sky Science · sv
MLS-baserad igenkänning och parameterutdrag för vägtakbultar/kablar från 3D-punktmoln
Att hålla gruvtunnlar säkra
Djupt under jord förlitar sig kolgruvor på metallbultar och kablar som borrats in i tunneltaket för att förhindra att berget kollapsar. Om dessa förstärkningar är felplacerade eller börjar svikta, riskerar arbetarnas liv. Ändå kontrolleras tusentals bultar idag till stor del för hand, med måttband och mätverktyg, i mörka och dammiga tunnlar. Denna studie introducerar ett automatiserat sätt att ”se” och mäta dessa dolda livlinor med hjälp av mobila laserskannrar och 3D-data, vilket lovar snabbare och mer objektiva säkerhetskontroller för moderna gruvor.
Skanna en tunnel i tre dimensioner
Forskarna byggde ett portabelt mobilt laserskanningssystem speciellt utformat för underjordiska vägar. Utrustat med en laseravståndsmätare och rörelsesensorer bärs eller skjuts enheten längs tunneln och avfyrar snabbt laserpulser mot omgivande berg. När den rör sig sammanfogar en navigationsmetod som kallas SLAM (Simultaneous Localization and Mapping) inkommande mätningar till en kontinuerlig 3D-modell av tunneln. Även utan GPS-signaler, som inte når under jord, kan systemet rekonstruera formen av ett 50-metersavsnitt av vägen med centimeters noggrannhet och fånga inte bara bergytor utan även stödhårdvara som bultar, kablar och stålplåtar.
Rensa upp det digitala tunneln
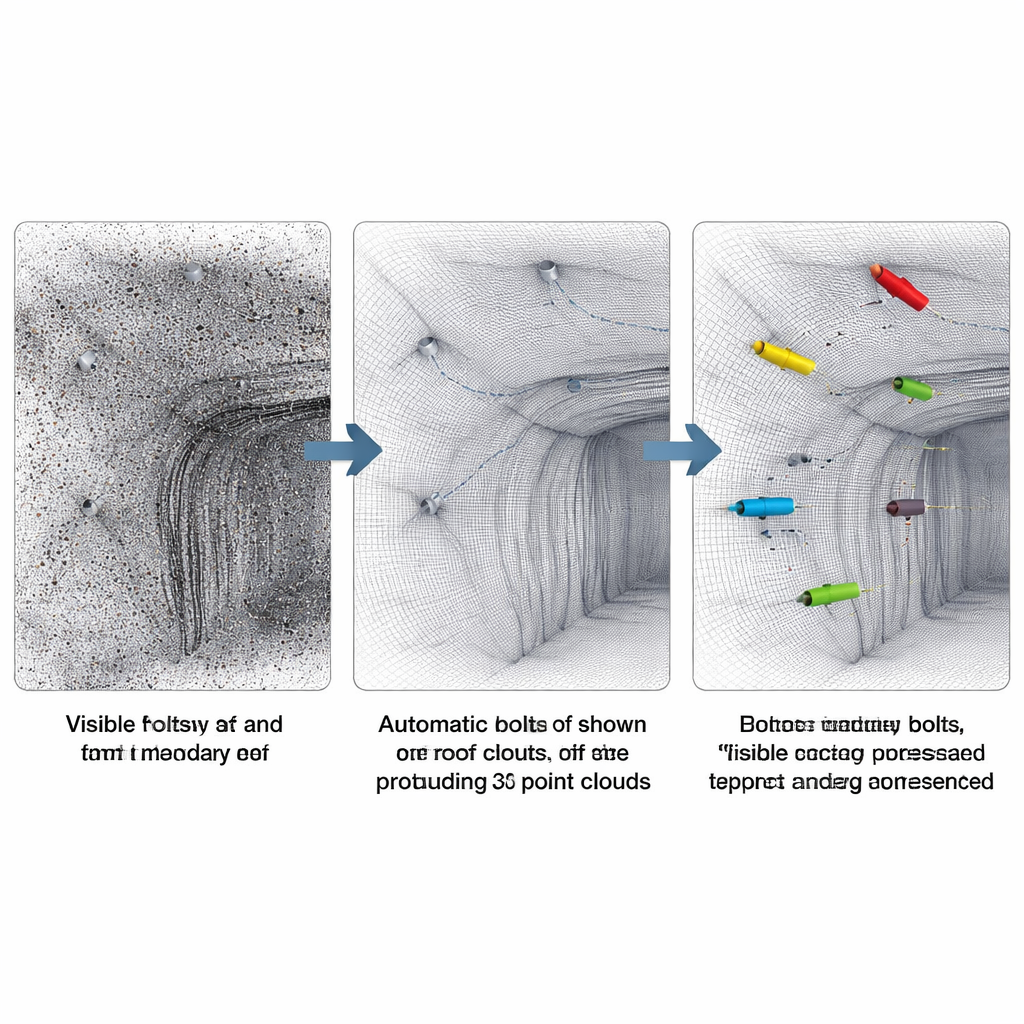
Råa 3D-skanningar från en gruva är röriga. Damm, vattenånga, arbetare och maskiner ger alla upphov till spridda punkter som ställer till problem i datan. Teamet använder först en tvåstegsrensningsprocess som tar bort uppenbara avvikare samtidigt som verkliga ytor som felaktigt kan ha tagits bort återhämtas. Därefter isolerar de bara tunneltaket, eftersom det är där stöd bultar och kablar är förankrade. Genom att matematisk rotera datan justerar de taket så att det ligger plant i en standardorientering, vilket gör det lättare att resonera om ”upp” och ”ner” och att konsekvent mäta riktning och längd för varje stödelement i hela scenen.
Låt virtuellt tyg hitta bultarna
För att separera takytan från hårdvaran som är fäst vid den använder forskarna en smart metod känd som Cloth Simulation Filter. De föreställer sig ett flexibelt tygark som långsamt sjunker under gravitationen över det upp-och-ner digitala taket. Där berget finns ligger tyget an mot ytan. Där en bult, kabel eller plåt sticker ut draperar tyget över den och lämnar en lucka. Genom att mäta den lilla höjdskillnaden mellan tyget och de faktiska punkterna markerar algoritmen vilka punkter som hör till den släta bergytan och vilka som sannolikt är utstickande objekt. Noggrant inställda parametrar säkerställer att tyget är tillräckligt detaljerat för att följa takets naturliga ojämnheter, men inte så fint att det av misstag ”slukar” bultarna det ska avslöja.
Lära datorn att räkna och mäta stöden
När potentiella utstickare är isolerade måste metoden fortfarande avgöra vilka punktkluster som är verkliga bultar eller kablar och vilka som är rör, hängande ledningar eller brus. Här grupperar en densitetsbaserad klustringsteknik närliggande punkter som bildar långsträckta former. Algoritmen anpassar sin sökradie och minsta klusterstorlek så att varje bult i regel blir ett rent kluster, utan att slå ihop grannar. För varje kluster hittar en enkel geometrisk analys objektets huvudaxel och projicerar alla punkter på den, vilket ger en uppskattning av utskjutande längd och lutningsvinkel. Ytterligare regler baserade på känd gruvdesign—såsom typiskt mellanrum, förväntad diameter och tillåten monteringsvinkel—hjälper till att filtrera bort falska träffar och behålla endast verkliga, korrekt installerade stöd.
Från 3D-kartor till praktiska säkerhetsinsikter
Metoden testades i en djup kolgruva i Inre Mongoliet, på fem på varandra följande taksegment som innehöll 127 bultar och kablar som noggrant märkts för hand. Det automatiserade systemet hittade korrekt 118 av dem, med bara några få missar och falsklarm, även under utmanande förhållanden med damm, delvis sprutbetong och störande metalldelar. Lika viktigt producerade det en strukturerad databas för varje stöd: dess exakta läge, mellanrum, längd som sticker ut ur taket och vinkel i förhållande till berget. För gruvingenjörer förvandlar detta ett komplext 3D-punktmoln till en färdig checklista för kvalitetskontroll och långtidsövervakning. Medan metoden fortfarande är beroende av att få bra skanningsdata och att åtminstone en del av varje bult är synlig, pekar den mot en framtid där rutinmässiga tunnelsäkerhetskontroller kan bli snabbare, mer frekventa och mindre beroende av subjektiva mänskliga bedömningar.
Citering: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
Nyckelord: mobil laserskanning, 3D-punktmoln, inspektion av bergbultar, underjordisk gruvsäkerhet, övervakning av tunnelstöd