Clear Sky Science · sv
Dynamisk kvalitetsmedveten banplanering för 6 DoF-robotarmar med BiRRT och metaheuristisk optimering baserad på B-splinebanor
Robotar som rör sig mjukt och säkert
Industrirobotar delar nu trånga arbetsytor med människor, verktyg och transportsystem. I dessa trånga miljöer kan en robotarm inte bara röra sig från punkt A till punkt B; den måste göra det utan kollisioner, med låg energiförbrukning och utan att skaka sönder sig själv eller närliggande utrustning. Denna artikel beskriver ett praktiskt sätt att planera sådana försiktiga rörelser för en vanlig sexlederad industrimanipulator, genom att förvandla grova, datorgenererade banor till släta, energieffektiva rörelser som kan köras säkert på verklig fabrikshårdvara.
Varför det är förvånansvärt svårt att planera ett enkelt räckande
När en robotarm rör sig måste många faktorer vägas samtidigt. Banan bör vara kort så att uppgifter slutförs snabbt, energianvändningen bör vara måttlig för att begränsa värme och slitage, och rörelsen bör vara tillräckligt mjuk för att undvika ryck eller vibrationer. Klassiska metoder drar släta matematiska kurvor (som splines) genom några handplockade vägpunkter, vilket fungerar väl i öppen miljö men kan bli ineffektivt eller till och med osäkert i trånga celler. Nyare samplingsmetoder, som Rapidly Exploring Random Trees (RRT), är bra på att tråckla sig igenom komplexa hinderfält men tenderar att producera banor med skarpa böjar som sliter på motorer och växlar. Författarna hävdar att ingen av metoderna är tillräcklig på egen hand; i stället kombinerar de dem i ett tvåstegsramverk.
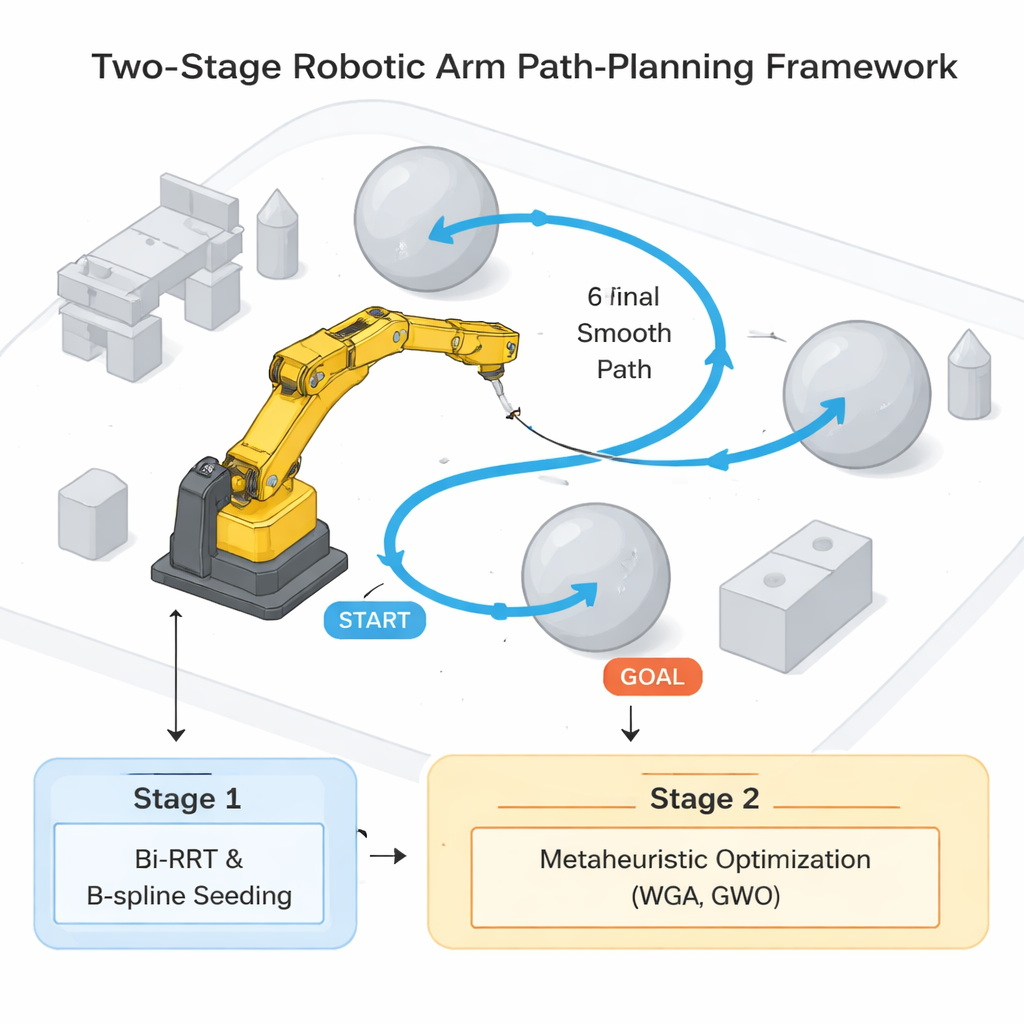
En tvåstegsplan för robotrörelser
I det första steget bygger teamet en säker “referensrutt” i robotens ledyta (joint space) snarare än endast handens position i världen. De börjar med en slät B-splinekurva som förbinder start- och målpunkter samtidigt som den undviker sfäriska hinder med ett säkerhetsmarginal. Denna kurva styr sedan en bidirektionell RRT (Bi-RRT) som växer två slumpträd—från start och mål—tills de möts i en kollisionsfri bana. Under processen kontrolleras varje tänkt rörelse för hela armen mot förenklade hinderformer. När en bana hittas trimmas överflödiga böjar bort genom så kallad ”short-cutting” och resultatet uttrycks om som en tidsparametriserad spline som roboten i princip kan följa.
Att lära roboten att röra sig mjukare
I det andra steget tar man denna genomförbara men ofullkomliga bana och ställer in den för kvalitet. Här använder författarna två naturinspirerade optimeringsmetoder: en hybrid Whale–Genetic Algorithm (WGA) och Grey Wolf Optimizer (GWO). Båda verkar på en begränsad mängd kontrollpunkter och tidstilldelningsparametrar längs den ursprungliga splinen, men ges endast möjlighet att flytta dessa punkter inom förutberäknade säkra korridorer runt banan. Varje kandidatbana poängsätts av ett enda sammanvägt mått som blandar tre komponenter: hur långt robotens verktyg rör sig, hur mycket energi på lednivå som används (baserat på varje motors egenskaper) och hur ”ryckig” leden är—hur snabbt deras accelerationer ändras över tid. Genom att upprepade gånger föreslå, testa och förbättra kandidatbanor söker dessa optimerare efter rörelser som fortfarande är kollisionsfria men avsevärt mjukare och bättre anpassade för verklig körning.
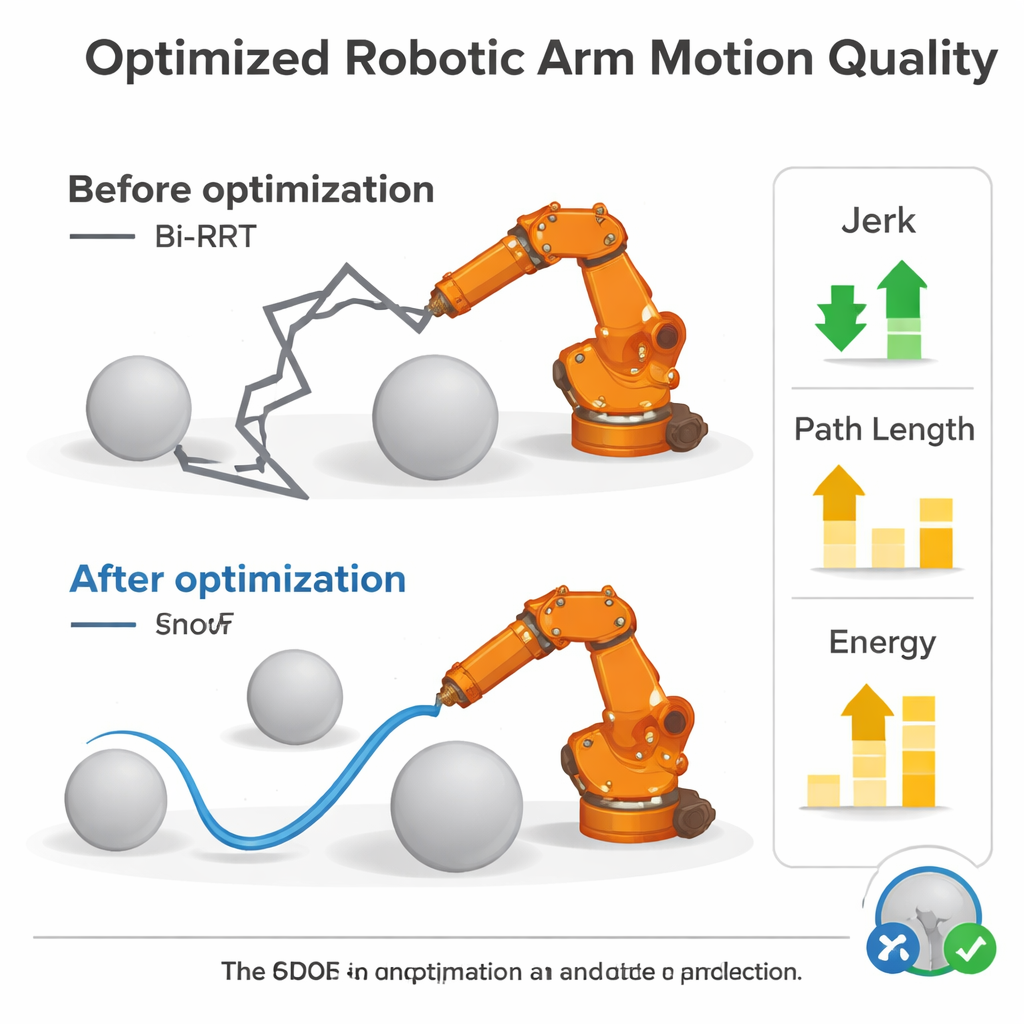
Vad simuleringarna visar
Författarna testar sin pipeline på en digital modell av en vanligt förekommande industriarm, KUKA KR 4 R600, som rör sig genom en scen med tre hinder över en fix tvåsekundersförflyttning. En ren spline-baserad lösning är redan hyfsat jämn men utnyttjar inte systematiskt alla möjliga säkra rutter. En Bi-RRT med short-cutting hittar en bana med liknande geometrisk längd och till och med lägre energianvändning, men med en stor nackdel: dess jerk-index—en indikator på hur abrupt lederna ändrar acceleration—är ungefär tio gånger högre, vilket signalerar en rörelse som sannolikt skulle framkalla vibrationer och belastning i en verklig maskin. Efter att ha applicerat WGA eller GWO minskar jerk med ungefär 94–96 procent jämfört med denna råa Bi-RRT-bana. Denna dramatiska utjämning sker till priset av endast måttliga ökningar i färdsträcka (cirka 15–17 procent) och energi (ungefär en faktor två), en kompromiss författarna menar är väl värd det för verklig utrustning.
Från teori till fabriksgolvet
För en icke-specialist är huvudslutsatsen att författarna erbjuder ett konkret recept—och MATLAB-baserade verktyg—för att förvandla en robots första, grova idé om hur den ska röra sig till en polerad, hårdvaruvänlig rörelse. Deras metod garanterar först att en bana existerar genom en rörig miljö, och omformar sedan den banan så att armen rör sig med färre ryck samtidigt som alla ledgränser och säkerhetsavstånd respekteras. Slutresultatet är en uppsättning rörelser som en verklig industribot kan utföra säkrare och mer tillförlitligt, vilket lägger grunden för framtida utvidgningar där robotar delar arbetsutrymmen med människor och anpassar sina rörelser i realtid med hjälp av kameror och till och med hjärnsignalintegreringar.
Citering: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Nyckelord: robotbanplanering, industriell robotarm, kollisionsundvikande, rörelsesläthet, metaheuristisk optimering