Clear Sky Science · sv
Djupinlärning för detektion av byggavfall med ConvNeXt V2 EMA-uppmärksamhet och WIoU v3-förlust
Varför smartare sortering av byggskräp spelar roll
Varje nytt bygge, renovering eller rivning genererar stora mängder skräp—krossad betong, tegel, kakel, trä, skum och mer. Mycket av detta material skulle kunna återvinnas, men hamnar ofta på deponier eftersom manuell sortering är långsam, kostsam och felbenägen. Denna studie undersöker hur en avancerad form av artificiell intelligens automatiskt kan känna igen och sortera olika typer av bygg- och rivningsavfall från bilder, vilket hjälper städer att minska föroreningar, spara råmaterial och komma närmare verklig cirkulär användning av byggnadsresurser.
Ras, resurser och ett växande globalt problem
Bygg- och rivningsavfall är nu en av världens snabbast växande avfallsströmmar, med omkring en miljard ton som genereras varje år. Dessa högar med skräp tar mark i anspråk, riskerar att förorena jord och vatten och slösar material som krävde energi och utsläpp för att framställas. Idag förlitar sig behandlingen fortfarande i hög grad på deponering och uppsamling. Automatiserade visionsystem som snabbt kan skilja betong från tegel, kakel från trä eller skum från gipsskiva skulle kunna förbättra återvinningsgrader dramatiskt. Men verkliga byggplatser är kaotiska: föremål överlappar, är täckta av damm och delar liknande färger och strukturer, vilket gör pålitlig automatisk igenkänning till en tuff utmaning.
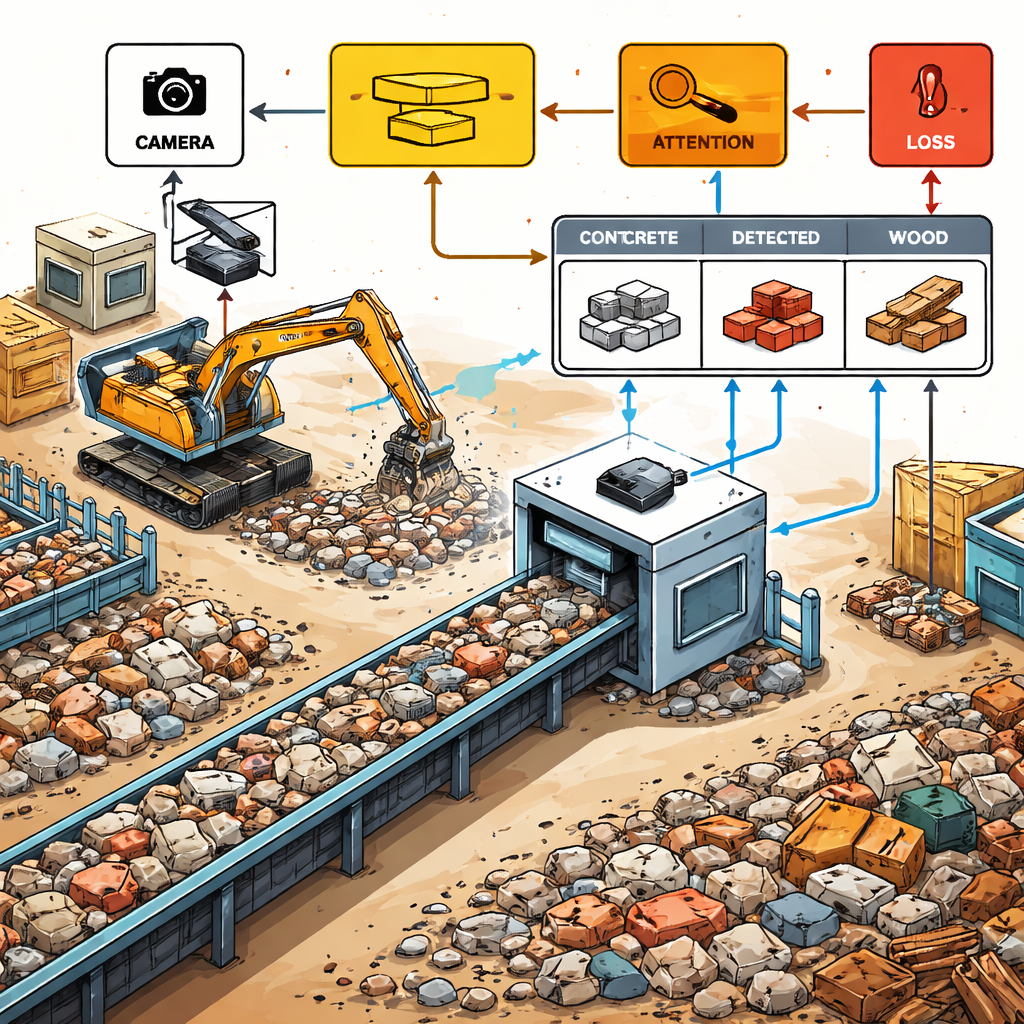
En ny digital "ögon" för avfall på transportbandet
Författarna presenterar ett specialanpassat objektdetekteringssystem kallat YOLO-CEW, byggt ovanpå den populära YOLO-familjen av realtidsvisionsmodeller. De tränar det på en specialiserad datamängd med 1 774 bilder tagna vid en återvinningsanläggning på Cypern, med över 11 000 märkta bitar bygg- och rivningsavfall i sex vanliga kategorier: betong, tegel, kakel, gipsskiva, trä och skum. Bilderna delas upp i separata uppsättningar för träning, validering och test för att undvika överanpassning, och modellen körs flera gånger med olika slumpmässiga startpunkter för att säkerställa robusta resultat. Målet är att hålla systemet tillräckligt snabbt för användning på rörliga transportband samtidigt som man markant förbättrar hur exakt det hittar och märker varje skräpbitar.
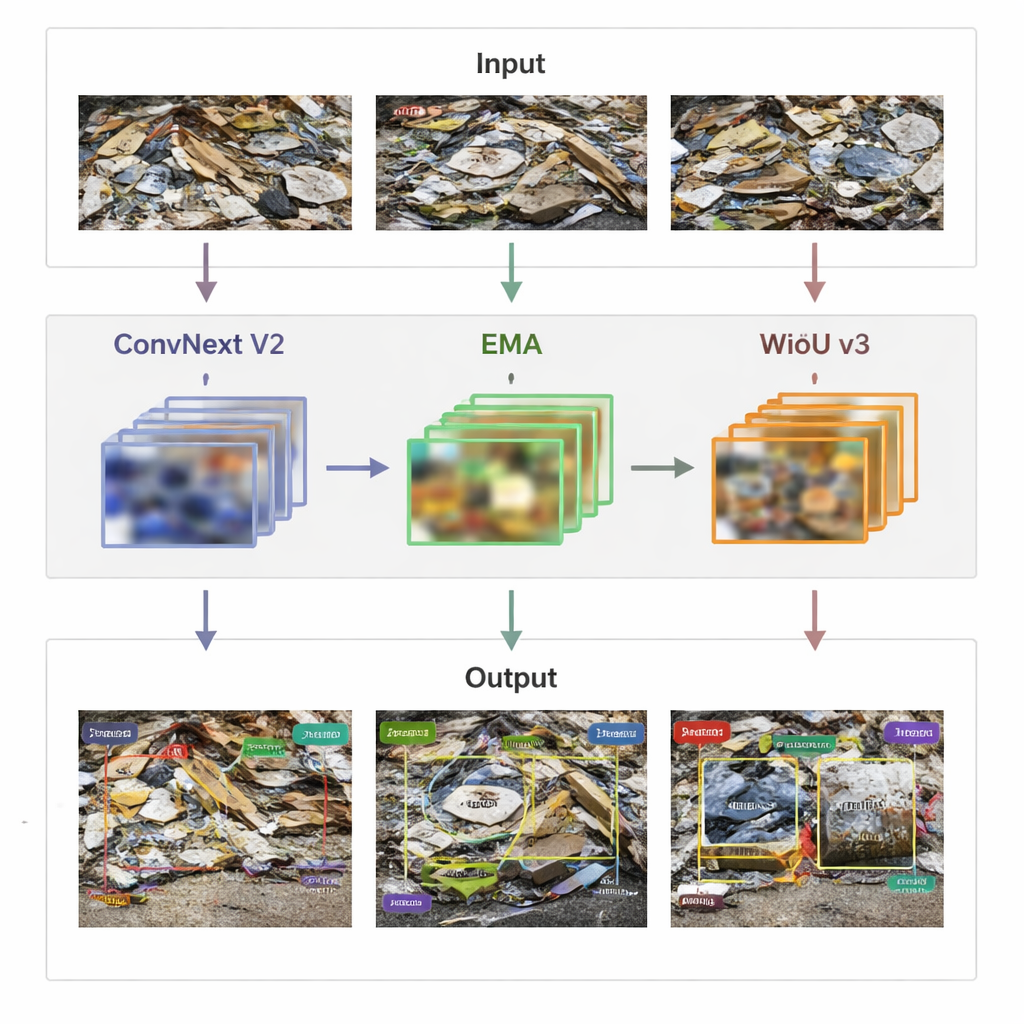
Hur den uppgraderade AI:n tittar närmare och lär av sina misstag
YOLO-CEW förbättrar baslinjen YOLOv8-modellen på tre viktiga sätt. För det första byts en nyare funktionsutvinningsryggrad in, ConvNeXt V2, i utvalda skeden, vilket är bättre på att fånga subtila visuella skillnader—som fina mönster som skiljer kakel från betong—utan att sakta ner systemet för mycket. För det andra lägger den till en Efficient Multi-scale Attention (EMA)-modul som lär nätverket att fokusera på de mest informativa regionerna i olika skalor, vilket förbättrar dess förmåga att hitta både stora skivor och små, delvis dolda fragment samtidigt som störande bakgrundsbrus ignoreras. För det tredje introduceras en uppdaterad träningsförlustfunktion, WIoU v3, som nedtonar mycket dåliga förslag på begränsande rutor och koncentrerar inlärningen på mer lovande exempel, vilket hjälper modellen att dra åt sina rutor kring verkliga objekt istället för att luras av brusiga prov.
Att sätta modellen på prov i realistiska förhållanden
På datamängden för byggavfall når YOLO-CEW en precision på 96,84 %, ett recall (återkallande) på 95,95 % och en total detektionspoäng (mAP@50) på 98,13 %, alla högre än den ursprungliga YOLOv8-baslinjen. I praktiska termer betyder det att den både missar färre objekt och ger färre falsklarm. Modellen är särskilt bra på att skilja svåra klasser som kakel och skum, även om viss förväxling mellan tegel och betong kvarstår när damm suddar ut gränserna. Viktigt är att systemet fortfarande körs i ungefär 128 bildrutor per sekund—mycket högre än vad som krävs för realtidsövervakning—så det är lämpligt för användning i aktiva återvinningslinjer. Statistiska tester med en bootstrap‑procedur bekräftar att dessa vinster inte beror på slumpen. Jämförelser med flera andra YOLO-varianter visar att YOLO-CEW konsekvent leder i noggrannhet samtidigt som det behåller en gynnsam balans mellan hastighet och prestanda.
Bortom en anläggning: anpassning till andra avfallsströmmar
För att se om deras angreppssätt generaliserar testar forskarna också YOLO-CEW på en separat publik datamängd för skräpdetection som täcker vanliga hushållsmaterial såsom plast, glas och kartong. Även utan att vara specifikt konstruerad för denna nya miljö överträffar modellen fortfarande standard-YOLOv8 i precision, recall och total detektionskvalitet. Detta antyder att de arkitektoniska förbättringarna—bättre funktionsutvinning, smartare uppmärksamhet och mer noggrann hantering av dåliga träningsexempel—kan återanvändas i andra återvinnings- och miljöövervakningsuppgifter, från hushållssortering till nedskräpningsdetektion med drönare.
Vad detta innebär för renare, smartare städer
För icke‑specialister är slutsatsen att YOLO-CEW fungerar som ett mycket mer exakt och skarpsynt kamerasystem för byggskräp. Det kan följa en rörlig ström av rivningsmaterial, plocka ut varje objekt och märka vilket material det är gjort av med mycket hög tillförlitlighet och hastighet. Detta gör det mycket enklare att utforma automatiserade linjer där maskiner sorterar och dirigerar material för återanvändning istället för deponering. Även om utmaningar kvarstår—såsom extrem oreda, damm och sällan förekommande material—visar studien att noggrant justerade djupinlärningsmodeller kan förvandla dagens högar av ”avfall” till morgondagens resursströmmar, och stödja grönare byggmetoder och smartare städer.
Citering: Han, D., Ma, M., Li, X. et al. Deep learning for construction waste detection using ConvNeXt V2 EMA attention and WIoU v3 loss. Sci Rep 16, 6441 (2026). https://doi.org/10.1038/s41598-026-37473-3
Nyckelord: byggavfall, återvinnings-AI, objektdetektion, smarta städer, djupinlärning