Clear Sky Science · sv
Säker formationsskalning och rörelseplanering för heterogena UAV–UGV-team i trånga miljöer
Robotar som samarbetar i luften och på marken
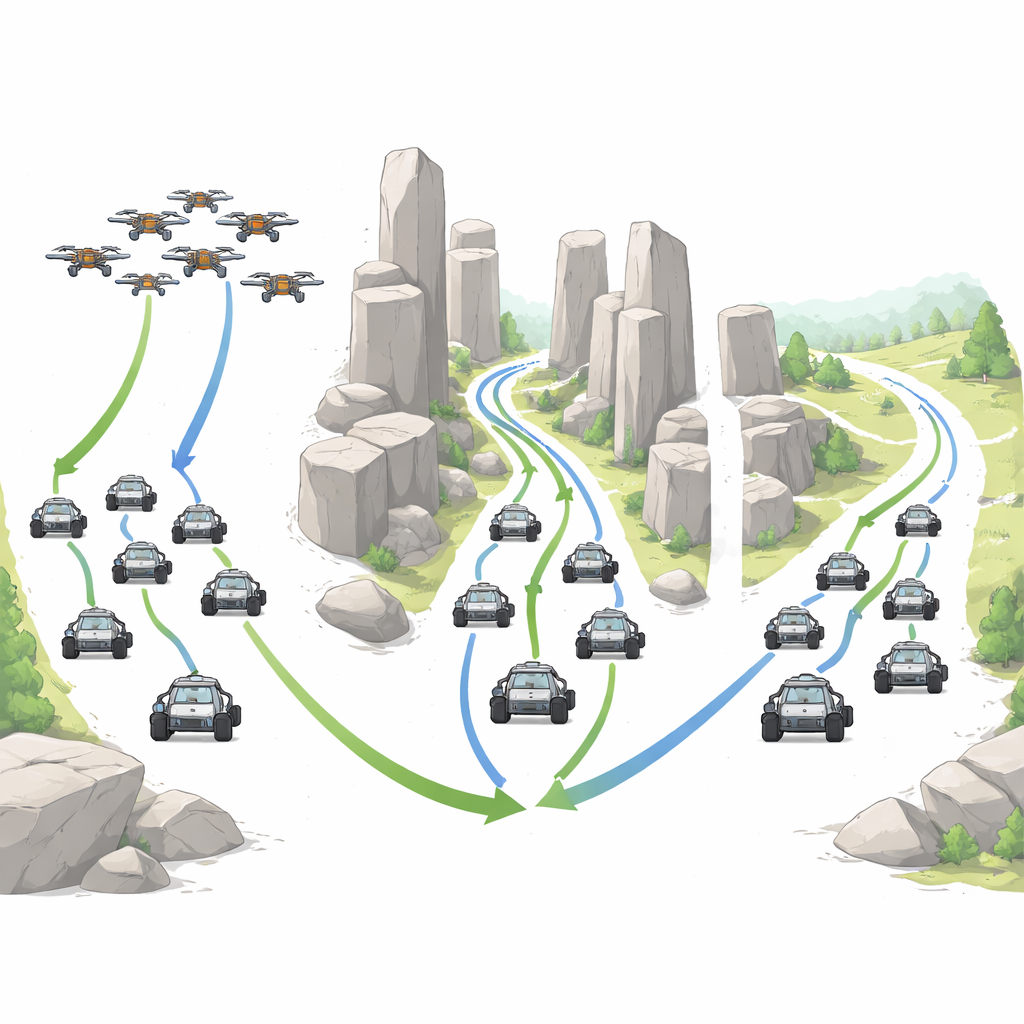
Föreställ dig en svärm av små flygande drönare som spanar över ett katastrofområde medan robusta markfordon slingrar sig genom rasmassor nedanför, alla rör sig som ett samordnat team. Denna artikel undersöker hur man håller sådana blandade robotgrupper samman i trånga, hinderfyllda utrymmen utan kollisioner eller panikartad omplanering. Författarna föreslår ett nytt sätt för luft- och markrobotar att dela en stabil formation, pressa sig igenom smala passager och ändå anlända snabbt och säkert till sitt mål.
Varför blandade robotteam är svåra att koordinera
Flygande drönare och hjulburna markfordon beter sig mycket olika. Drönare kastar sig genom tredimensionellt utrymme och påverkas lätt av vindar. Markfordon måste följa svängbegränsningar och hantera ojämn terräng. Ändå skulle många verkliga uppdrag – från sök- och räddningsinsatser till inspektion av infrastruktur – ha nytta av att dessa robotar kan färdas tillsammans som en enda, tredimensionell enhet. Befintliga metoder behandlar ofta formationshållning och hinderundvikande som separata problem. När miljön blir trång tenderar formationer att brytas upp och senare återbildas, vilket slösar tid och ökar risken för kollisioner.
En ny metod för att hålla gruppen samman
För att ta itu med detta utformar författarna ett ramverk de kallar RG–ASAPF, som knyter samman hur gruppens form bestäms och hur den rör sig. I dess kärna finns en matematisk beskrivning av formationen som en "styv" struktur: önskade avstånd mellan robotarna väljs så att den övergripande formen bestäms entydigt, som stag i ett stabilt 3D-ställverk. Varje robot använder sedan en gemensam regel för att justera sin rörelse så att dessa avstånd återställs och bibehålls, även när formationen flyttar sig och svänger. Denna regel är utformad för att fungera för både flygande och körande robotar och anpassar sig online till osäkerheter såsom omodellerad friktion eller små yttre stötar.
Låta formationen andas genom trånga utrymmen
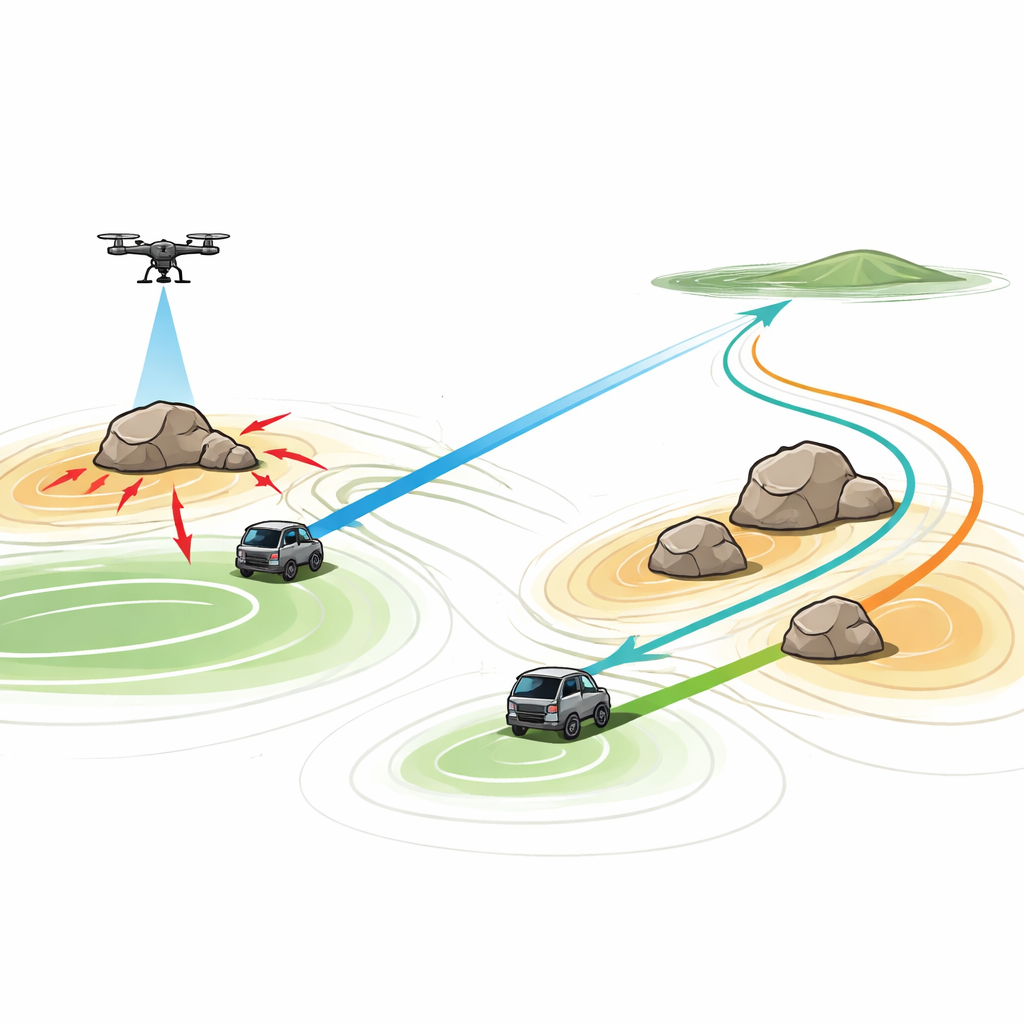
Verkliga miljöer är sällan öppna fält; de är fyllda med byggnader, träd, fordon och rörliga objekt. En formation som är säker i öppet område kan vara för stor för att passera genom en smal gränd eller en tät hinderklunga. Den föreslagna metoden tillåter formationen att smidigt skalas – krympa eller expandera sin totala storlek – samtidigt som dess grundläggande struktur bevaras. Teamet introducerar ett ledande markfordon som planerar en bana med hjälp av ett artificiellt potentialfält, där målet fungerar som en attraktor och hinder driver formationen bort. Till skillnad från traditionella potentialfält, som kan fastna i återvändsgränder eller orsaka ryckig rörelse, justerar deras "adaptiva säkra" version kontinuerligt hur starkt hinder repellering verkar så att de håller ett säkert avstånd utan att bli överdrivet försiktiga eller instängda.
Smartare vägar genom trängsel och rörelse
Potentialfältet förfinas ytterligare så att den övergripande "landskapen" av attraktion och repulsion alltid har sin lägsta punkt vid målet. Detta hjälper till att förhindra att formationen blir strandsatt på besvärliga platser mellan hinder. Styrkan hos den repulsiva effekten justeras i realtid med en enkel inlärningsregel lånad från tidig neuralt nätverksträning. När robotar kommer för nära hinder växer repulsionen automatiskt; när det finns gott om utrymme slappnar den av. Om miljön blir så trång att inte ens en nedskalad formation kan passera säkert aktiverar metoden en reservplan: teamet pausar kort, utvidgar en föreställd säker korridor och omplanerar en säkrare rutt runt det problematiska området innan de fortsätter.
Testning i virtuella världar
För att se hur väl metoden fungerar kör författarna omfattande datorsimuleringar med blandade team av drönare och markfordon. De testar öppna områden med bara några få hinder, täta labyrinter med många barriärer, scener med rörliga hinder och formationer som måste förändras till mer komplexa 3D-formationer såsom ett hexagonalt prisma. I samtliga dessa fall håller formationen ihop i tre dimensioner, undviker säkert statiska och rörliga hinder och justerar sin storlek vid behov. Robotarna följer släta, effektiva banor istället för att zigzaga runt hinder. Jämfört med flera populära planeringsmetoder – inklusive klassiska och förbättrade potentialfält, partikel-svärmsoptimering samt både linjär och icke-linjär modellprediktiv styrning – hittar den nya metoden oftast banor som är kortare, mjukare och mindre energikrävande, samtidigt som den beräknar dem snabbare än tunga optimeringsbaserade tekniker.
Vad detta betyder för verkliga uppdrag
För en icke-specialist är huvudbudskapet att artikeln visar hur man får blandade team av flygande och körande robotar att röra sig som en enda, flexibel kropp genom trånga 3D-utrymmen. Istället för att bryta formationen när hinder dyker upp kan gruppen böja sig, krympa och omorientera sig samtidigt som den förblir sammanhängande och säker. Detta kan översättas till snabbare, mer pålitligt robotstöd vid katastrofer, industrins inspektioner och säkerhetspatruller. Medan det nuvarande arbetet demonstreras i simuleringar och förlitar sig på ett utsedda ledarfordon beskriver författarna framtida steg mot mer feltoleranta team och verkliga experiment, vilket för de tätt koordinerade luft–mark-robotsvärmarna närmare praktik.
Citering: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Nyckelord: flerrrobotformation, UAV UGV-samarbete, hinderundvikande, rörelseplanering, svärmrobotik