Clear Sky Science · sv
En överarms-teleopérationsexoskelett med steglös arm-längdsparametrisering och adaptiv kraftutlöst impedansblandning
Säkrare hands-on-arbete från ett tryggt avstånd
Många av de farligaste jobben på jorden — och i rymden — kräver fortfarande mänskligt omdöme och fingerfärdighet. Tänk på att reparera en skadad kärnteknisk anläggning, hantera sprängämnen eller stabilisera ett rymdfordon. I den här studien presenteras en ny typ av drivdrivet armexoskelett som låter en person styra en avlägsen robotarm som om det vore den egna armen, samtidigt som användaren håller sig långt från fara. Enheten fokuserar på att få roboten att röra sig och ”kännas” som en naturlig förlängning av bärarens kropp, även när den anpassar sig till olika armlängder och förändrade krafter i omgivningen.
Varför fjärrarmar spelar roll
Robotar arbetar redan under vatten, i katastrofområden och inne i reaktorer, men de flesta är antingen förprogrammerade eller styrs med enkla joysticks. Det begränsar vad de klarar av när förhållandena plötsligt förändras. Teleoperationssystem — där en människa styr en avlägsen robot i realtid — erbjuder en mellannivå som kombinerar mänskligt beslutsfattande med robotens styrka och räckvidd. Tidigare system kunde flytta verktyg, men saknade ofta exakt återkoppling om krafter och kunde inte lätt anpassa sig till olika användarkroppar. Resultatet blev klumpiga rörelser, dålig ”känsla” och extra belastning både för operatören och för maskinen.
En bärbar robotarm som verkligen passar
Teamet byggde ett bärbart exoskelett för överkroppen med sju drivna leder som linjerar upp med axel, armbåge och handled. Lätta material som kolfiber och aluminium håller enheten responsiv i stället för tung och slö. En viktig innovation är att exoskelettets överarms- och underarmslängd kan justeras smidigt, inte i några fasta steg. Skenor som glider med inbyggda elektriska sensorer mäter kontinuerligt bärarens faktiska armlängd och matar den informationen in i en digital kroppmodell. Som en följd omformar enheten automatiskt sin inre geometri efter varje person, vilket förbättrar komforten och gör robotens rörelser mer trogna människans avsikter. 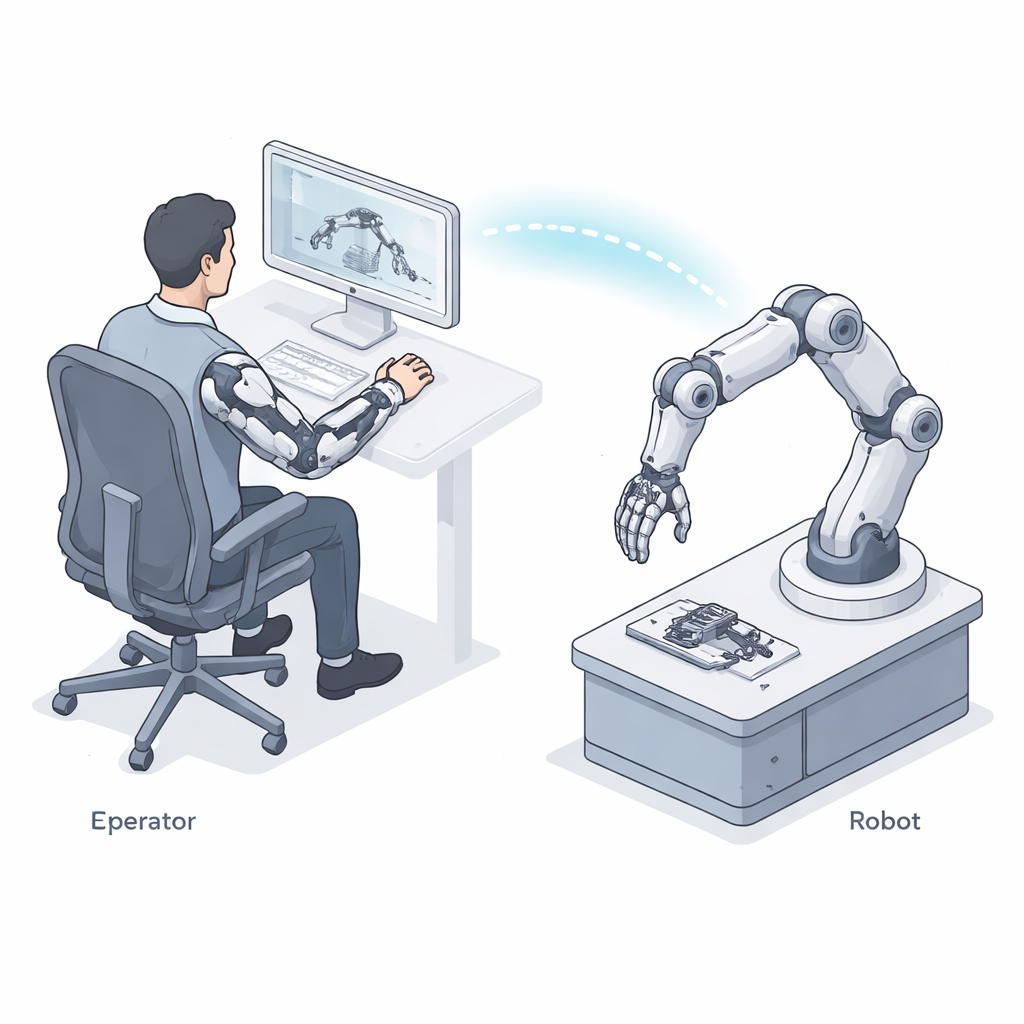
Rör sig med kroppen, inte mot den
Mänskliga axlar roterar inte bara som gångjärn; skulderbladet glider också över bröstkorgen. Många exoskelett ignorerar detta och hamnar i konflikt med naturlig rörelse, vilket orsakar obehag. Denna design lägger till en passiv modul med flera extra frihetsgrader som tyst följer subtila skiftningar i skuldra och överkropp, vilket lättar trycket på hud och leder. Samtidigt är de drivna lederna inställda så att deras vridmoment — vridande kraft — håller sig under säkra gränser för mänsklig vävnad. Nödstopp och låsdetektorer kompletterar säkerhetsfunktionerna och gör att systemet kan reagera snabbt om något går fel.
En smartare metod för att känna kontakt
Bortom mekaniken fokuserar författarna på vad bäraren känner. När den avlägsna roboten rör vid eller trycker mot något — en vägg, ett verktygsgrepp eller ett annat föremål — översätts dessa krafter tillbaka genom exoskelettet så att användaren uppfattar motstånd. Styrsystemet blandar två behov som normalt står i konflikt: noggrann spårning av operatörens rörelser och mjukt, följsamt beteende när kontaktkrafterna ökar. Vid låga krafter agerar systemet styvt och precist och följer tätt bärarens armrörelser. När krafterna överstiger en säkerhetströskel mjuknar regleringen automatiskt och tillåter viss eftergivlighet så att stötar dämpas i stället för att bli skakiga. Författarna använder energi-baserade matematiska verktyg för att visa att detta blandade beteende förblir stabilt snarare än att utvecklas till oscillationer. 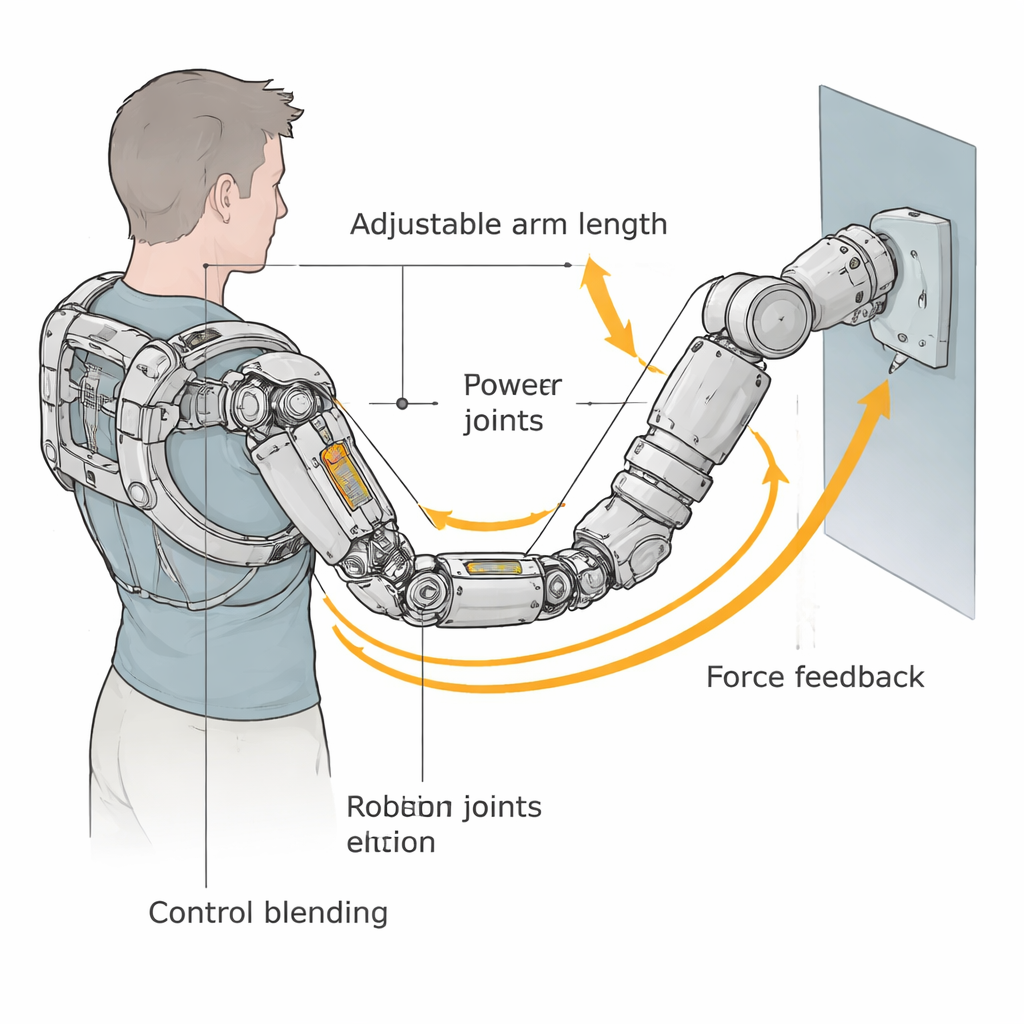
Att sätta systemet på prov
För att utvärdera exoskelettet kopplade forskarna det till en vanligt använd industrirrobotarm. När en person som bar exoskelettet följde en åtta-formad bana i luften, reproducerade den avlägsna roboten rörelsen noggrant, trots små kommunikationsförseningar. Ytterligare tester undersökte hur väl armlängdssensorn fungerade: spänningsavläsningar från de glidande sensorerna stämde överens med fysiska mätningar med fel på mindre än några millimeter, även efter upprepad på- och avtagning. I kontrollerade simuleringar där roboten pressade mot en virtuell stel vägg minskade hela styrschemat toppkrafterna vid kontakt med nästan 70 procent jämfört med en grundläggande konfiguration, samtidigt som spårningsnoggrannheten i fri rörelse i stort sett bibehölls.
Vad detta betyder för verkligt arbete och vård
I vardagliga termer för oss detta forskning närmare avlägsna robotar som känns lika naturliga och säkra att styra som att röra sin egen arm. Genom att kombinera en kroppsnära justerbar ram, noggrann spårning av mänskliga rörelser och smart kraftåterkoppling som anpassar sig i realtid, lovar systemet mer precis och mindre ansträngande teleoperation i farliga miljöer. Samma teknik kan också hjälpa patienter som återhämtar sig efter stroke, genom att terapeuter kan vägleda och registrera armrörelser medan patienterna får livstrogen assistans och feedback. När framtida versioner integrerar signaler från muskler och ögonrörelser och lär sig av erfarenhet, kan sådana exoskelett-robotpar bli mångsidiga verktyg för både extrema uppdrag och vardaglig rehabilitering.
Citering: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Nyckelord: teleoperation exoskelett, robotarmstyrning, kraftåterkoppling, rehabiliteringsrobotik, fjärrstyrda farliga operationer