Clear Sky Science · sv
Realtidsuppskattning av batteriets SOC och autonom laddningsstrategi för dynamisk energilagringsladdande robot med utökad Kalmanfilter
Varför smartare robotbatterier är viktiga
Från lagerbud till inspektionsrobotar är mobila robotars användbarhet beroende av deras batterier. Om en robot felbedömer hur mycket energi som finns kvar kan den stanna långt från en laddare, avbryta arbetet och utsätta batteriet för skada. Denna artikel presenterar ett nytt sätt för robotar att i realtid "veta" sitt verkliga batterinivå och att välja när och hur de ska ladda sig själva, så att de kan arbeta längre, säkrare och med mindre mänsklig övervakning.

Robots, intensiva uppgifter och påfrestade batterier
Till skillnad från elbilar som kör jämnt på motorvägar, utsätts många mobila robotar för snabba starter, stopp och frekventa förändringar i arbetsbelastning. Dessa stötar orsakar snabba svängningar i batteriström och spänning, vilket förvirrar traditionella metoder för att uppskatta kvarvarande laddning. Enkla metoder som avläser batterispänning eller bara summerar ström över tid förutsätter ofta lugna, stabila förhållanden och tar inte hänsyn till hur batteriet åldras eller värms upp. Resultatet blir att uppskattningarna driver iväg, fel ackumuleras och roboten kan antingen ladda för ofta eller pressa batteriet för hårt, vilket förkortar dess livslängd.
En mer realistisk modell av vad som händer inne i batteriet
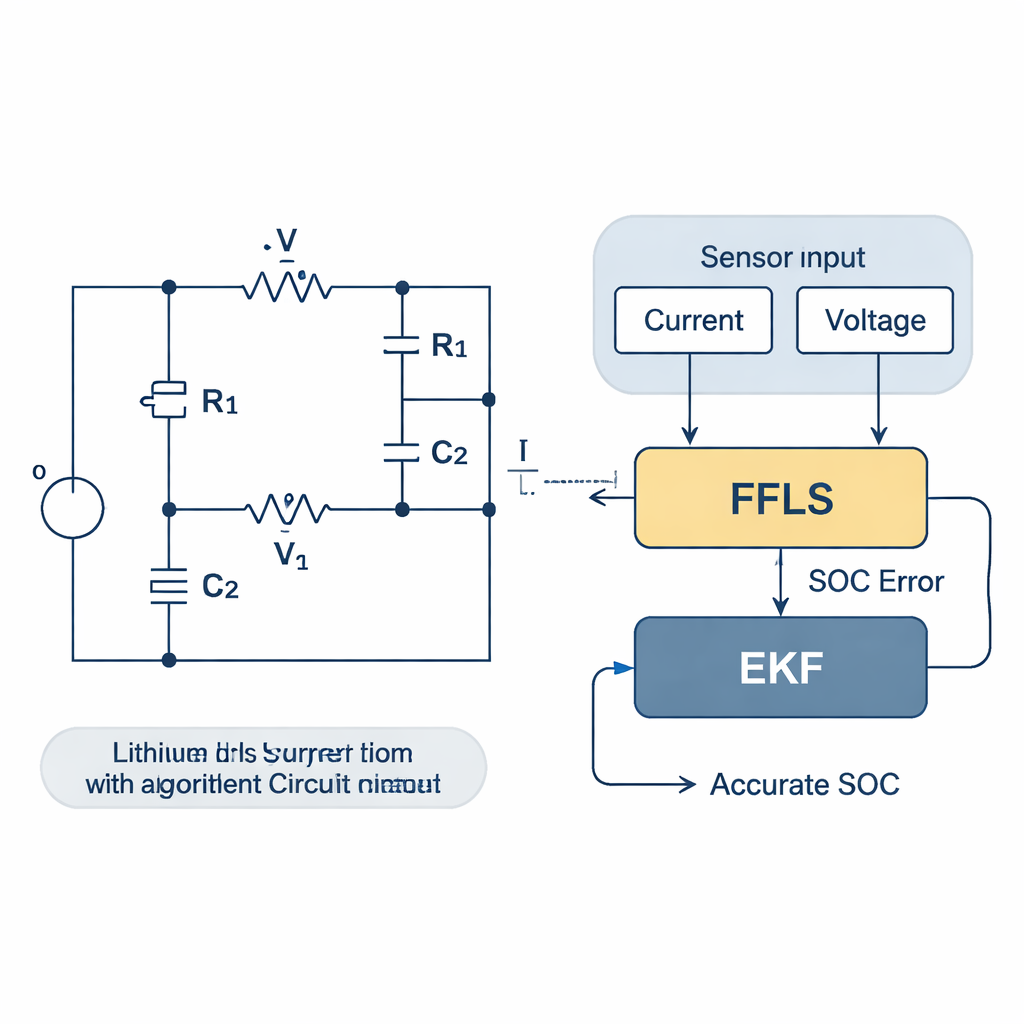
Författarna angriper detta genom att ge roboten en mer realistisk bild av dess lithiumjärnfosfatbatteripack. Istället för att behandla batteriet som en svart låda med ett enda spänningsvärde, representerar de det som ett elektriskt nätverk med inre resistans och två "polarisations"-grenar som efterliknar hur joner rör sig och ackumuleras inne i cellen. Denna andragradiga RC-modell fångar snabba och långsamma responser på belastningsförändringar. Roboten mäter kontinuerligt ström och spänning och anpassar dessa signaler till modellen med en minsta kvadraters metod som inkluderar en "forgetting factor" – ett matematiskt sätt att lägga större vikt vid nyare data och tona ner föråldrad historik när förhållandena ändras.
Låta algoritmen lära och anpassa sig i farten
Ovanpå denna modell använder teamet ett utökat Kalmanfilter, ett flitigt använt verktyg för att följa dolda tillstånd i brusiga data. Här är det dolda tillståndet batteriets verkliga laddningstillstånd. När roboten arbetar förutser filtret hur laddningen bör förändras baserat på modellen och den uppmätta strömmen, och korrigerar sedan den förutsägelsen med hjälp av den uppmätta spänningen. Modulen med minsta kvadraters metod och forgetting factor uppdaterar löpande viktiga modellparametrar online, så filtret förlitar sig aldrig på en föråldrad, fabriks-kalibrerad batteribeskrivning. Genomtänkt utnyttjar forskarna också ett samband mellan intern resistans och en kvantitet kallad polarisationskapacitans: när temperaturen stiger faller resistansen och kapacitansen växer. Genom att observera båda samtidigt kan systemet härleda temperaturpåverkan utan någon fysisk temperatursensor och justera modellen därefter.
Lära robotar när och hur de ska ladda
Exakta laddningsuppskattningar är bara halva berättelsen; den andra halvan är hur roboten använder dem. Författarna utformar en autonom laddningsstrategi som undviker både konstant "påfyllning" och djupa urladdningar. De definierar övre och nedre laddningsgränser: om batteriet sjunker under en tröskel prioriterar roboten att återvända till en dockningsstation; om det redan ligger nära den övre gränsen skjuter den upp laddning och fortsätter arbeta. Inom det säkra intervallet laddar roboten under vilostunder. Systemet övervakar också varje cell i batteripacket och balanserar deras laddning så att ingen cell överfylls medan andra ligger efter, ett viktigt steg för att förhindra förtida åldrande. För att göra dockning effektiv kombinerar roboten rumsnivånavigering med kortdistans infraröd vägledning, vilket förkortar rutter och dockningstid.
Längre livslängd och mer pålitlig robotkraft
I tester med offentliga batteridataset, simuleringar och verkliga robotar uppskattade den nya metoden laddningstillståndet med cirka 98 % noggrannhet och överträffade tydligt flera avancerade alternativ baserade på partikelfilter, neurala nätverk och Transformers. Batterier som hanterades med denna metod behöll sin kapacitet bättre över veckor av simulerad användning och klarade 15–40 % fler laddnings–urladdningscykler än med konkurrerande metoder. Intern resistans ökade långsammare, en indikator på friskare celler, och robotarna spenderade mindre tid dockade samtidigt som batterihälsan hölls högre. För en lekmannamening är slutsatsen att denna teknik låter robotar bli bättre "vårdare" av sina egna batterier: de kan bedöma sin energi mer precist, välja smartare tillfällen att ladda och tyst förlänga arbetslivet för kostsamma batteripack utan extra sensorer eller tung datorkraft.
Citering: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Nyckelord: mobila robotar, batteriets laddningstillstånd, autonom laddning, utökat Kalmanfilter, lithiumjärnfosfatbatterier