Clear Sky Science · sv
Dynamisk kedja för schemaläggning av multi-AGV-system med lastmedveten rörelseprofilering
Varför lagersrobotar behöver bättre timing
E-handeln har fyllt lager med varor som måste flyttas snabbt, säkert och dygnet runt. Många anläggningar förlitar sig nu på flottor av golvrobotar—Automated Guided Vehicles, eller AGV:er—för att transportera hyllor och pallar. Men om dessa robotar schemaläggs med förenklade antaganden om hur de rör sig kan de slösa tid, skaka ömtåliga paket eller till och med riskera kollisioner. Denna artikel presenterar ett nytt sätt att planera och samordna många AGV:er samtidigt genom att ta deras verkliga fysiska beteende i beaktande, vilket lovar jämnare trafik och säkrare gods i upptagna lager.
Robotar som flyttar gods, inte bara siffror
Moderna AGV:er korsar redan lager, flygplatser och fabriker och drar vagnar eller lyfter hyllor och pallar. De flesta befintliga system som hanterar dessa flottor arbetar på en hög nivå: de bestämmer vilken robot som ska ta vilket jobb och ungefär vilken rutt den ska följa. För att förenkla matematiken antar man oftast att restiden mellan två punkter är fast, och ignorerar hur snabbt en robot faktiskt kan accelerera eller bromsa, eller hur tung last den bär. Författarna visar att denna genväg skapar problem i verkliga byggnader. Robotar kan anlända till korsningar tidigare eller senare än väntat, vilket ökar risken för köbildning, nära-kollisioner eller plötsliga inbromsningar som skakar det de transporterar.
Att lägga verklig fysik till schemat
Forskarna angriper detta gap med en tvåstegsmetod som blandar fysik och schemaläggning. Först designar de en Dynamic Traveling Time-estimator för AGV:er, kallad DTT-AGV. Istället för att behandla en korridor som ett enda tidsspann delar DTT-AGV upp varje förflyttning i faser: acceleration, kryssningshastighet och inbromsning. Den använder en enkel mekanisk modell av en AGV som bär en hylla, där hyllan beter sig som en massa kopplad via fjädrar och dämpare. Denna modell fångar hur acceleration och retardation kan få lasten att svaja eller vibrera. Utifrån detta beräknar algoritmen hur snabbt fordonet säkert kan färdas för en given sträcka och last utan att överskrida gränser för hastighet, kraft eller vibration, och returnerar en realistisk restid för varje segment av vägen.
Hindra att robotar möts nos mot nos
För det andra introducerar teamet en Arrival Time Chaining-metod, ATC-AGV, som koordinerar många robotar på delade banor. När DTT-AGV har uppskattat hur lång tid varje segment tar tilldelar ATC-AGV exakta ankomst- och avgångstider vid varje nod—korsningar, svängar eller överlämningspunkter—längs varje robots rutt. Den bygger en tids"kedja" vid varje delad nod och säkerställer ett säkert avstånd mellan fordon samtidigt som den tar hänsyn till aktuella robottillstånd, såsom om de är lastade, laddar eller svänger. Om en ny plan skulle få två AGV:er att befinna sig för nära varandra i tid flyttar ATC-AGV en robots schema precis tillräckligt för att återställa säkerhetsmarginalen. I praktiken förvandlar det lagergolvets rutnät till en tidmedveten karta som hjälper till att förhindra kollisioner innan de kan uppstå.
Test av mjukare rörelser och skonsammare transporter
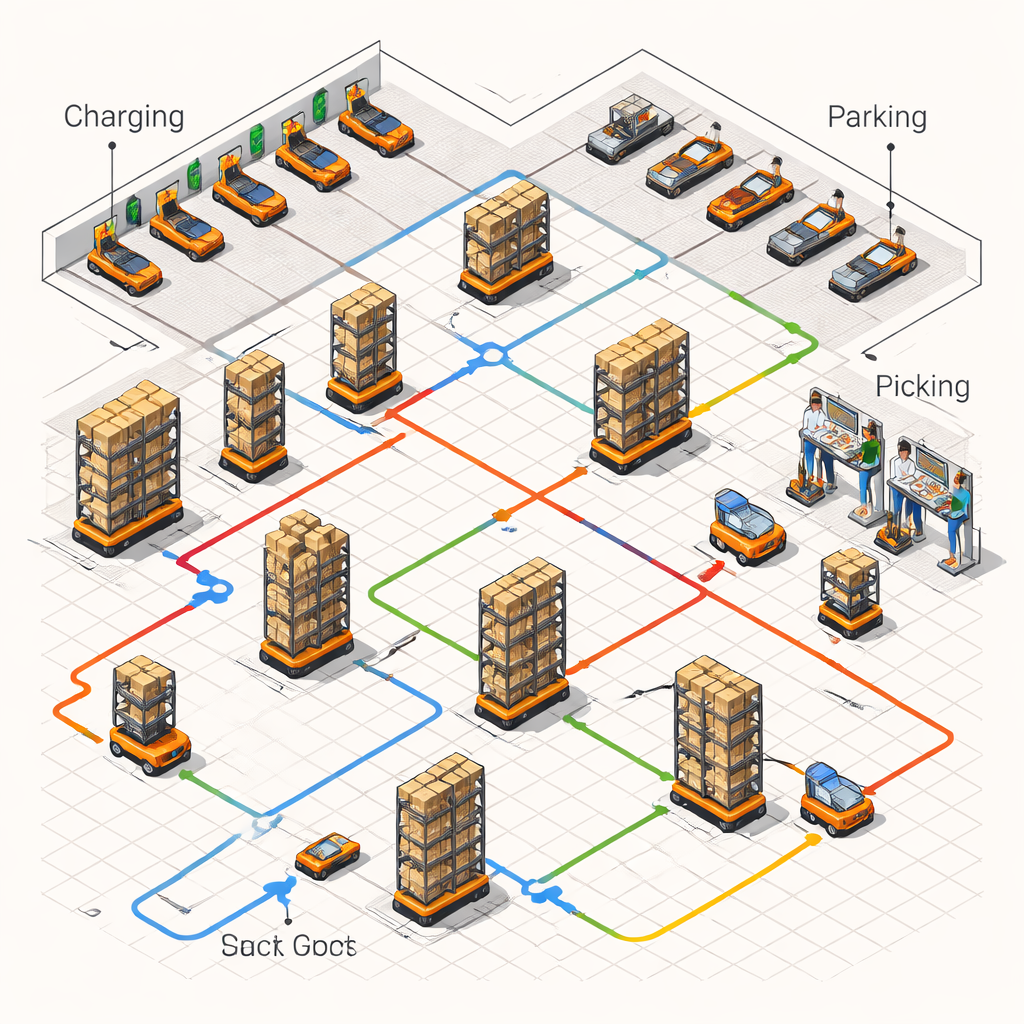
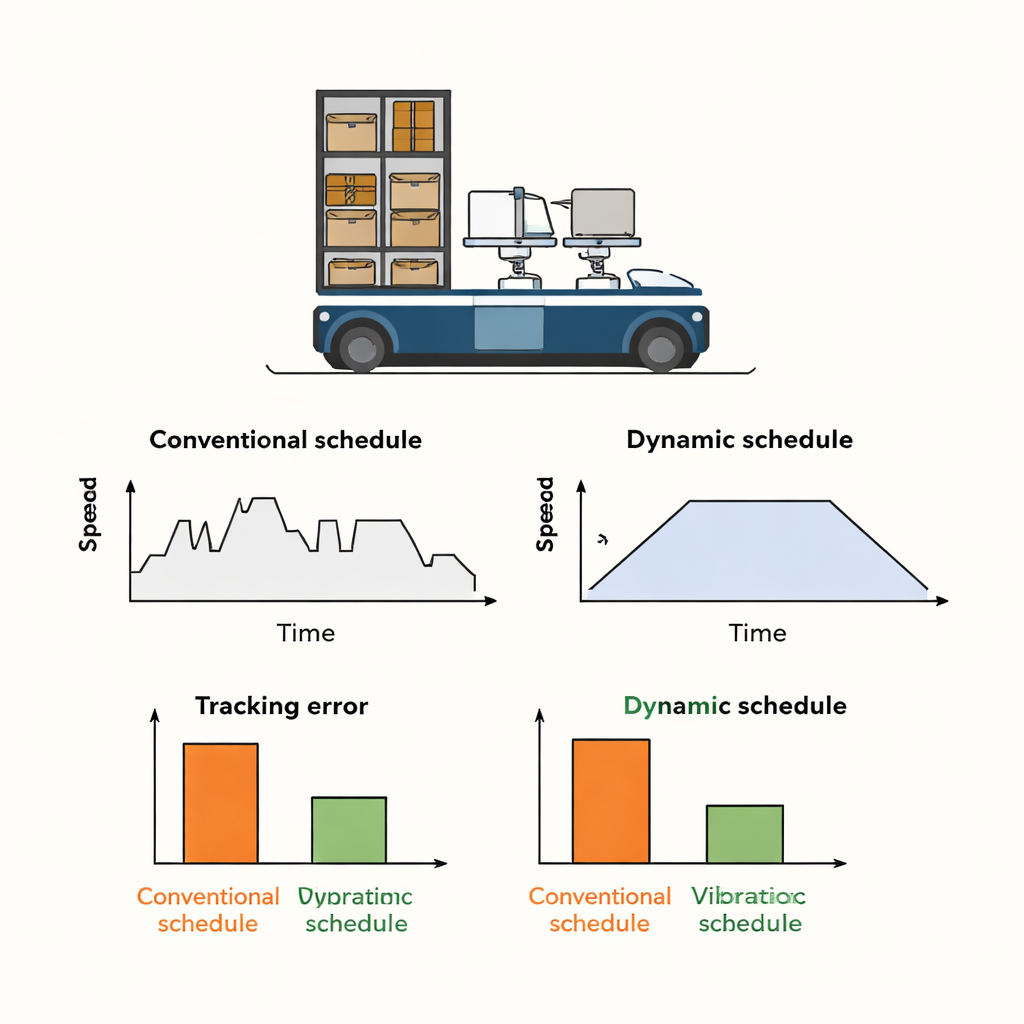
För att testa sina idéer simulerar författarna AGV:er i ett rutnätsbaserat cross-docking-lager som inkluderar laddningsområden, parkeringsplatser och hyllzoner. De jämför sin planner med en konventionell metod som antar nästan konstant hastighet och ignorerar detaljerade rörelsefaser. I ett test färdas en robot längs en L-formad bana och vrider sedan 90 grader. Den traditionella metoden genererar skarpa hastighetsförändringar i hörnet, vilket den verkliga roboten inte kan följa perfekt. Resultatet blir stora följningsfel—skillnader mellan var roboten borde vara och var den faktiskt är—och toppar i tidfel vid nyckelpunkter. Med den nya planner delas banan upp i tydliga faser för acceleration, kryssning och inbromsning. Den simulerade roboten följer nu sin målbana nära, med mycket mindre fel och mjukare svängar.
Mjukare för paket och framtidssäkrat
Den andra testsatsen fokuserar på hur själva lasten beter sig. När det konventionella schemat används upplever robotens bas plötsliga stötar i acceleration som exciterar hyllans fjäderliknande beteende och orsakar starka vibrationer i godset. Med det dynamiska, lastmedvetna schemat håller sig accelerationerna inom ett snävare band och ändras mer jämnt. Mätt över tid sjunker både topp- och genomsnittsvibrationerna hos lasten kraftigt, vilket är avgörande för ömtåliga, staplade eller instabila föremål. Författarna undersöker också hur försummade faktorer som hjul-golv-friktion kan påverka deras uppskattningar och finner att, under typiska lagerförhållanden, förblir den tillagda tidfelet inom de säkerhetsbuffertar som byggts in i deras algoritm.
Vad detta betyder för verkliga lager
Enkelt uttryckt lär detta arbete AGV-schemaläggare att respektera maskinernas verkliga rörelser. Genom att basera restider och rätt-till-vägen-beslut på hur snabbt robotar faktiskt kan accelerera, bromsa och bära olika laster utan att skaka sönder dem, minskar det föreslagna ramverket fel i banföljning, sänker godsvibrationer och minskar risken för konflikter i korsningar. För lageroperatörer och tillverkare översätts det till jämnare trafik, säkrare hantering av varor och en grund som kan skala när flottor växer och layouter blir mer komplexa.
Citering: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Nyckelord: automatiserade styrda fordon, lagerrobotik, kollisionsfri schemaläggning, rörelseplanering, smart logistik