Clear Sky Science · sv
Hängning av fyrrotorare med adaptiv kontinuerlig andragradskontroll i närvaro av osäkerheter
Varför det är viktigt att drönare kan fästa på väggar
Föreställ dig en liten drönare som inte bara svävar tills batteriet tar slut, utan som tyst kan landa på en vägg likt en fågel och sedan sitta där i timmar och övervaka en bro, ett åkerfält eller en skogskant. Denna artikel presenterar en ny metod för att styra sådana ”hängande” drönare så att de kan flyga upp till en vertikal yta, ta kontakt utan att studsa bort och sitta kvar stabilt även när luften är turbulent eller drönarens beteende inte är helt känt. Arbetet tar sig an utmaningen att förvandla en skör flygande maskin till ett pålitligt, energisparande inspektionsverktyg.
Från svävande robotar till väggklättrande spanare
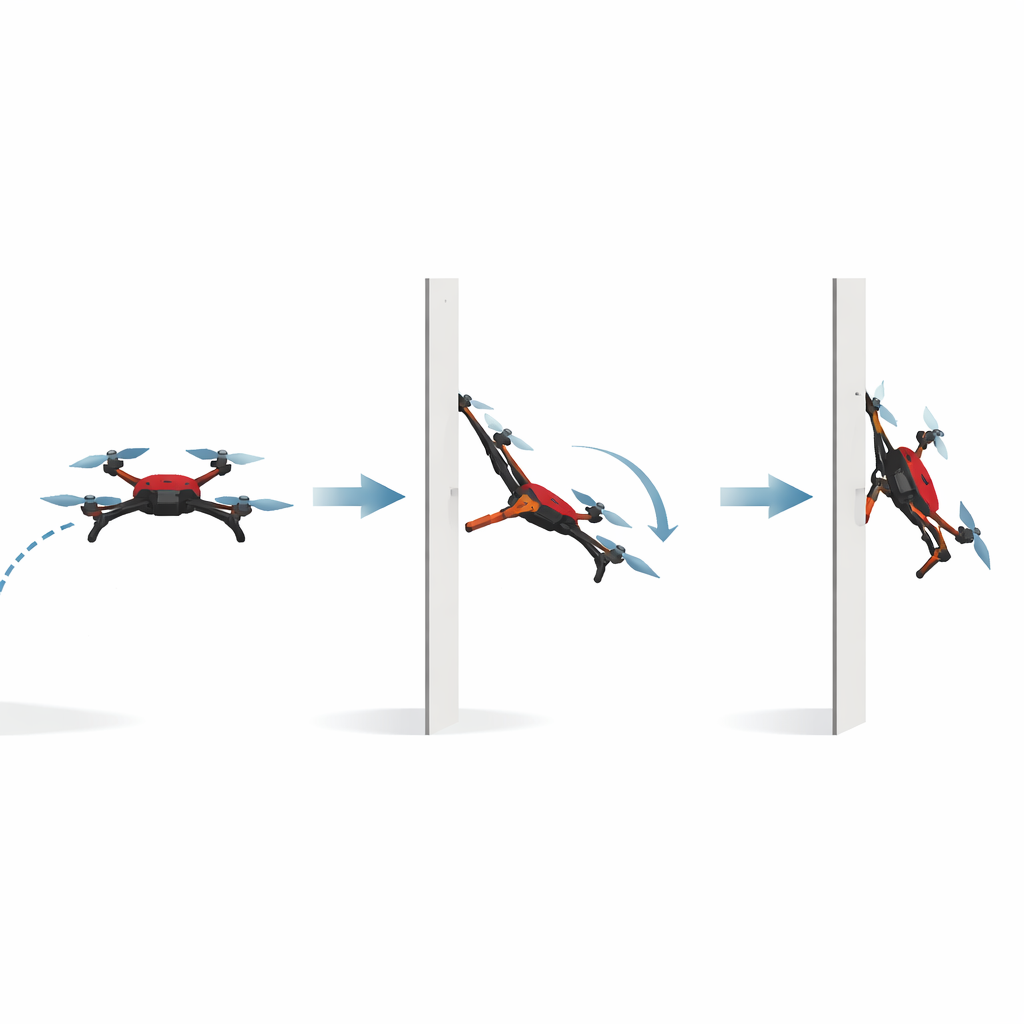
Små fyrrotorsdrönare, eller quadrotorer, används redan för kartläggning, byggnadsinspektion, djurobservation och precisionsjordbruk. Deras största begränsning är dock uthålligheten: svävning förbrukar batteri. Att fästa på en yta—som en vägg, stolpe eller undersida av en bro—låter drönaren stänga av större delen av sina motorer samtidigt som sensorerna behålls för långtidsobservation. Att göra detta på ett säkert sätt är långt ifrån trivialt. Under den korta men kritiska landningsmanövern måste drönaren närma sig väggen, vidröra den och rotera till nosen nedåt utan att studsa, glida eller tappa kontrollen när oväntade vindstötar eller modellfel stör dess rörelse.
Utmaningen med en felfri vägglandning
Författarna studerar en quadrotor utrustad med en lätt stödarm framtill som fungerar som den fysiska kontaktpunkten med väggen. När drönaren övergår från fri flygning till kontakt är dess position (sido-, framåt- och höjdled) och dess attityd (roll, pitch, yaw) tätt sammankopplade: ändrad orientering påverkar hur dragkraft omsätts i rörelse, och den plötsliga reaktionskraften från väggen kan vrida drönarkroppen. Utöver detta verkar verkliga effekter—som aerodynamiska interaktioner nära väggen, små byggfel och sensorrum—som okända störningar. Befintliga robusta styrmetoder kan hålla drönare stabila, men de ger ofta högfrekvent ”skakning” i motor-kommandon, sliter på hårdvaran och garanterar endast att fel krymper gradvis snarare än inom ett förutsägbart, kort tidsintervall.
En smartare metod för balans och anpassning
För att övervinna dessa problem introducerar artikeln ett adaptivt andragradigt kontinuerligt styrschema (ASOCC). Enkelt uttryckt ser regulatorn inte bara på hur långt drönarens rörelse är från målet, utan också på hur snabbt det felet förändras, och formar sina kommandon så att båda går mot noll på en ändlig tid. En inbyggd störningsobserver fungerar som en realtids ”bruslyssnare” och skattar den sammanlagda effekten av okända krafter och modellavvikelser och matar tillbaka denna information i styrlagen. Avgörande är att förstärkningsparametrarna som bestämmer hur kraftigt regulatorn reagerar anpassas under drift baserat på dessa uppskattningar, istället för att vara fasta i förväg. Eftersom styrsignalerna förändras mjukt istället för att växla abrupt minskar designen kraftigt chattering samtidigt som stark robusthet behålls.
Prövar den nya styrningen
Forskarna analyserar först matematiken bakom deras observer-regulatorpar och bevisar, med hjälp av energiliknande Lyapunov-funktioner, att alla rörelsefel konvergerar till noll inom en ändlig tid trots begränsade störningar. De simulerar sedan aggressiva hängningsscenarier i mjukvara och utsätter drönarmodellen för vindliknande krafter, slumpmässigt mätbrus och avsiktliga fel i dess fysikaliska parametrar. I dessa tester vägledde ASOCC drönaren genom tre skeden—förberedelse, närmande och hängning—samtidigt som positions- och orienteringsfel hölls små och styrinsatserna släta. Jämfört med flera avancerade alternativ, inklusive populära sliding‑mode- och modellbaserade regulatorer, minskade den nya metoden nyckelmått för följningsfel med ungefär 35–55 procent.
Från simulering till en riktig drönare på en vägg
Utöver simuleringar byggde teamet en miniatyr-hängande quadrotor med en kommersiell flygkontrollertavla och en 3D-utskriven ram med en främre arm. I inomhusexperiment flög drönaren autonomt mot en lutande vägg, steg till cirka en meter och tippade sedan nosen nedåt för att ta kontakt och förbli fäst. Tidsseriedata visar att höjd, horisontell position och pitchvinkel följer sina önskade banor nära, med endast små störningar från sensorrus. Trots billig hårdvara, kommunikationsförseningar och aktuatorbegränsningar studsade drönaren inte bort eller började oscillera efter påverkan, vilket visar att ASOCC kan hantera flygets stökiga verklighet.
Vad detta betyder för framtida flygande inspektörer
För icke-experter är huvudresultatet enkelt: detta arbete levererar en styrstrategi som låter små drönare pålitligt fästa på vertikala ytor och stanna där, även när förhållandena är ofullkomliga. Genom att kombinera mjuk men kraftfull korrigerande styrning med en adaptiv störningsobserver möjliggör metoden snabb, precis hängning utan den jitter och det hårdvarustress som ses i många robusta regulatorer. Det öppnar dörren för långtidsövervakning från luften med lättare batterier, enklare plattformar och ökad säkerhet—ett viktigt steg mot flottor av autonoma ”väggklängande” robotar som tyst bevakar infrastruktur, grödor och naturmiljöer.
Citering: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Nyckelord: fyrrotor-hängning, adaptiv styrning, drönarinspektion, störningsobserver, luftrobotik