Clear Sky Science · sv
En lättviktig YOLO-baserad modell för noggrann detektion av röda pepparklasar vid robotiserad skörd
Smartare robotar för kryddig skörd
Sichuanpeppar, de små röda kapslarna som ger sichuan-köket sin karaktäristiska pirrande hetta, är förvånansvärt svåra att plocka. Frukterna växer i täta, taggiga klasar som lätt kan skadas, och handplockning är långsamt och säsongsbundet arbete. Denna studie presenterar ett nytt datorseendesystem, kallat Red-YOLO, utformat för att hjälpa små, mobila robotar att snabbt och noggrant upptäcka dessa ömtåliga pepparklasar i verkliga fruktträdgårdar, även när frukter överlappar eller döljs bakom blad.
Varför pepparplockning är så knepigt
Till skillnad från stora, släta frukter som äpplen växer Sichuanpeppar som många små bär tätt packade på taggiga grenar. Klasarna kan se mycket olika ut mellan träd: vissa är täta och kompakta, andra lösa och spridda, och alla omges av förvirrande bakgrunder av grenar, blad och skiftande ljus. För en robot är det avgörande att se var en klase slutar och en annan börjar — och hur tätt frukterna sitter — eftersom gripkraften och till och med storleken på robotens plockverktyg måste anpassas. Annars kan pepparens känsliga oljekapslar brista, vilket minskar kvalitet och värde.
Att bygga ett bildbibliotek från verkligheten
Eftersom det inte fanns några publika bildsamlingar för denna gröda var forskarna först tvungna att skapa sin egen datamängd. Under två odlingssäsonger i Hanyuan län i Sichuan fotograferade de pepparträd i verkliga fruktträdgårdar med en konsumentmobil och fångade 960 högupplösta, kvadratiska bilder under olika solvinklar och tidpunkter på dagen. Varje bild märktes noggrant för hand, där man skiljde mellan kompakta och lösa klasar. För att lära datorn hantera variationer ändrade de många av bilderna digitalt — justerade ljusstyrka och kontrast, spegelvände horisontellt, deformade vissa mönster och roterade vyer. Detta utökade träningssetet till över 4 300 bilder, medan en liten uppsättning opåverkade foton sparades för ett ärligt sluttest av systemets prestanda.
En slankare, vassare datorseendemodell
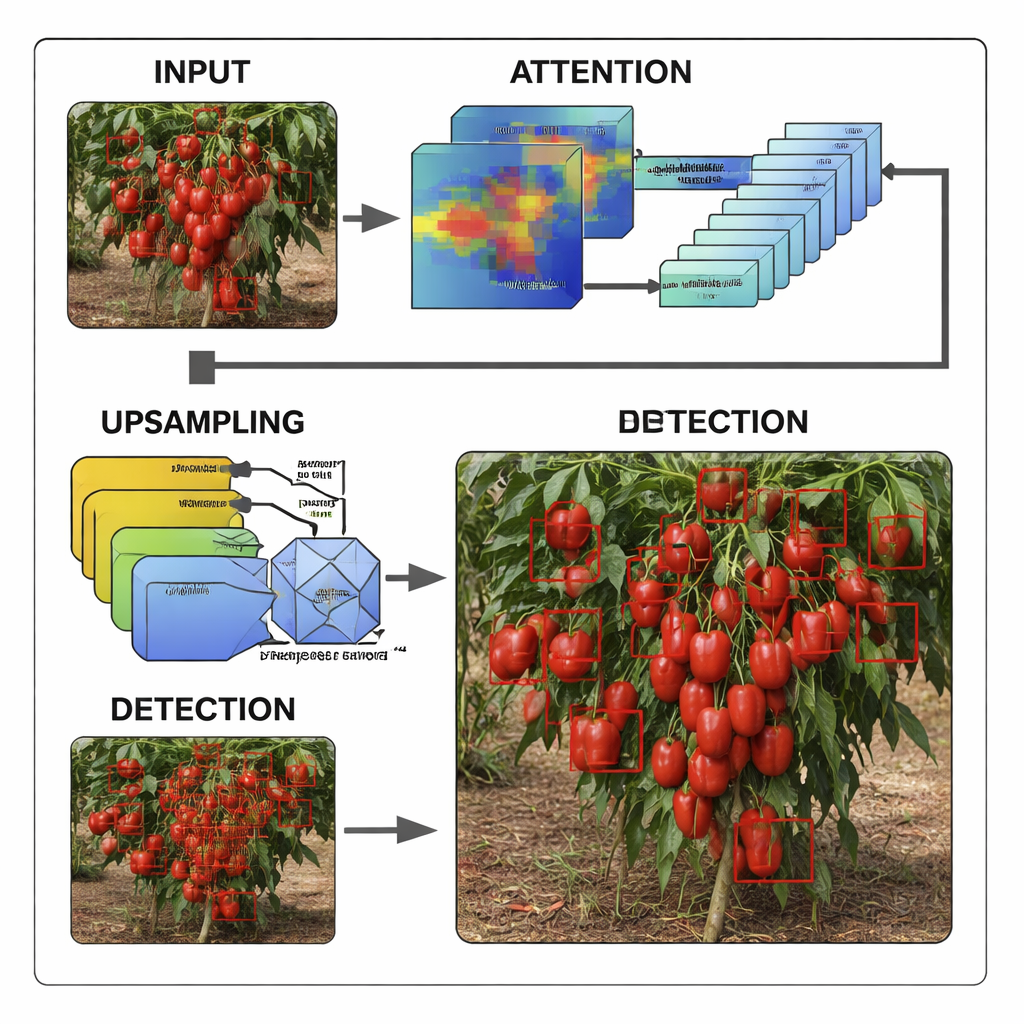
I kärnan av systemet ligger YOLOv8, en ofta använd “you only look once”-modell för objektdetektion som hittar objekt i ett enda, snabbt steg istället för i flera långsammare faser. Teamet anpassade en mycket liten version av denna modell och omformade den specifikt för röda pepparklasar. De la till en uppmärksamhetsmodul som lär nätverket att fokusera på kanaler och områden som sannolikt innehåller frukt och ignorera störningar som himmel, grenar och avlägsna träd. De omdesignerade delar av nätverket så att det kan återanvända information mer effektivt och minska onödiga beräkningar. De ersatte också ett enkelt omskalningssteg med ett smartare uppsamplingsblock som återskapar fina detaljer och gränser runt överlappande peppar, vilket hjälper modellen att särskilja var trånga klasar börjar och slutar.
Snabbt, noggrant seende för små robotar
För att avgöra om förändringarna var meningsfulla jämförde forskarna Red-YOLO med både äldre, tyngre detektionssystem och en rad moderna, lättviktiga YOLO-varianter. Traditionella flerstegsmodeller, trots sin styrka, var helt enkelt för långsamma och resurskrävande för kompakta fruktträdgårdsrobotar. Flera nyare YOLO-versioner presterade bättre men hade svårt med små, delvis dolda klasar eller röriga bakgrunder, och missade ofta frukter eller misstag blad för peppar. Red-YOLO hittade en bättre balans: den detekterade pepparklasar med högre total noggrannhet och återkallning än alla jämförda modeller, samtidigt som modellens storlek hölls under tre miljoner parametrar och beräkningsbördan låg nog för inbyggda processorer. Tester i olika fruktträdgårdsscener visade att Red-YOLO konsekvent fann klasar även när frukterna var små, skuggade eller kraftigt överlappande.
Från laboratoriemodell till hjälp i fruktträdgården
För icke-specialister är huvudresultatet praktiskt: detta arbete visar att ett kompakt, noggrant finjusterat visionssystem kan ge små skördrobotar ett pålitligt “öga” på fältet. Med Red-YOLO kan en robot automatiskt avgöra om den handskas med en kompakt eller diffus klase och justera sitt gripdon i storlek och kraft innan plockning, vilket minskar skador och sparar arbetskraft. Även om den aktuella studien fokuserar på en pepparsort i en region kan samma metod — att bygga fokuserade datamängder och förfina slanka detektionsmodeller — utvidgas till andra specialgrödor. När dessa visionsystem blir mer robusta och mer spridda kan de bidra till snabbare, säkrare och mer konsekvent skörd, och därigenom säkra en stabil tillgång på de peppar som ger många av världens populäraste smaker kraft.
Citering: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Nyckelord: robotiserad skörd, pepparigenkänning, datorseende, lättviktig YOLO, smart jordbruk