Clear Sky Science · sv
Utveckling av smart vårdrobot med förbättrad autonom navigering genom ruttoptimering i sjukhusavdelningar
Robotar som hjälper sjuksköterskor, inte ersätter dem
Sjukhus världen över är under tryck: fler äldre patienter, mer kronisk sjukdom och personal som är uttömd till sina gränser. Denna studie beskriver en smart vårdrobot som inte är avsedd att ta över omvårdnaden, utan att diskret hantera upprepade övervakningar och nattkontroller på sjukhusavdelningarna. Genom att röra sig säkert och pålitligt på egen hand kan denna robot hjälpa sjuksköterskor att upptäcka akuta situationer snabbare — som fall eller plötsliga feber — samtidigt som den minskar deras arbetsbelastning och risken för olyckor i trånga korridorer och smala dörröppningar.
Varför sjukhuskorridorer är svåra för robotar
Vid första anblick ser en sjukhuskorridor enkel ut: raka linjer, rena golv, regelbundna dörrar. För en robot är det allt annat än enkelt. Sängar, vagnar, väggar och framför allt smala dörröppningar skapar trånga utrymmen där även ett litet misstag kan leda till kollision. Många befintliga sjukhusrobotar förlitar sig på en mängd sensorer och komplex hårdvara för att klara detta. Teamet bakom denna studie gick en annan väg: de satte upp målet att skapa en robot som kan röra sig säkert med bara en huvudsensor — en tvådimensionell laserskanner som mäter avstånd runt den — och en smartare metod för ruttplanering.

Bygga sjuksköterskans extra ögon
Forskarlaget utvecklade en smart vårdrobot (SPCR) ovanpå en kommersiell hjulbas. På robotens kropp monterade de en 3D-kamera för att upptäcka fall och läsa vitala tecken utan kroppskontakt, samt en 2D-lasersutrustning på toppen för kontinuerlig 360-graders skanning av omgivningen. Inuti roboten sitter en inbyggd dator, batterier, motorstyrningar och kommunikationselektronik som gör att den kan prata med en kontrollapp och fatta egna körbeslut. Robotens drivning tillåter rörelser i alla riktningar, den kan vinkla en kamerarm för att titta på patienter och är designad för att fungera flera timmar i reala sjukhusmiljöer.
En smartare karta istället för mer hårdvara
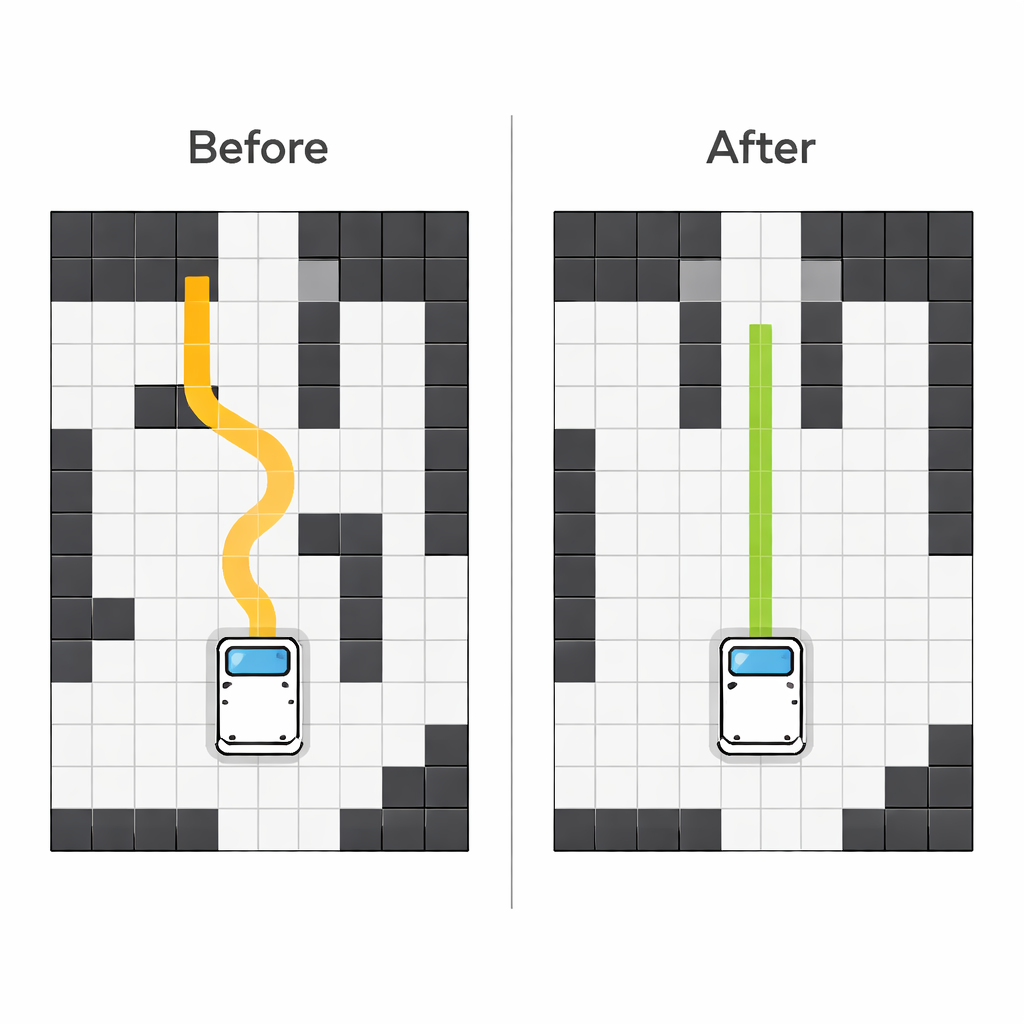
För att navigera behöver roboten först en karta som markerar var den kan och inte kan köra. Teamet började från exakta ritningar av en sjukhuskorridor och omvandlade dem till ett rutnätsbaserat kartformat, där varje liten fyrkant är klassad som fri yta, vägg eller hinder. Istället för att lämna kartan som den var formade de om den för att vara mer försiktig än verkligheten. De införde "virtuella hinderzoner" — extra blockerade områden som mjukt skjuter roboten bort från riskfyllda platser såsom dörrkanter och trånga hörn. Ruttplaneringsprogramvaran, baserad på en förbättrad version av D* Lite-algoritmen, söker sedan igenom denna säkrare karta efter rutter som undviker skarpa svängar och håller roboten närmare mitten i smalare passager.
Sätta roboten på prov i verkliga avdelningar
Systemet testades i en faktisk sjukhuskorridor uppdelad i tre sektioner med olika kombinationer av gångar, dörrar och hinder. Robotens uppdrag var att färdas mellan kontrollpunkter, passera genom standarddörrar på 90 centimeter och undvika väggar och fasta föremål. Eftersom roboten själv är cirka 76 centimeter bred hade den bara några centimeter spelrum på vardera sidan när den gick genom dörröppningarna — förhållanden där många robotar får problem. Genom att jämföra prestanda före och efter justering av rutnätskartan fann forskarna att robotens framgångsfrekvens att slutföra sina rutter utan att nudda något ökade med mer än 30 procent i alla sektioner, med jämnare banor och färre onödiga manövrar.
Vad detta betyder för framtidens patientvård
För icke-specialister är huvudbudskapet enkelt: istället för att utrusta robotar med allt fler sensorer visar denna studie att noggrant digitalt kartbygge och smartare ruttplanering kan göra sjukhusrobotar både säkrare och mer praktiska. En robot som tillförlitligt kan smyga igenom smala dörrar på natten, följa effektiva rutter och tyst kontrollera patienters grundläggande tecken skulle kunna frigöra sjuksköterskor att fokusera på mänsklig vård — trösta familjer, fatta komplexa beslut och hantera akuta situationer. Författarna ser detta arbete som en grund: framtida versioner kommer att lägga till fler sensorer och rikare patientövervakningsfunktioner, med sikte på pålitliga dygnet-runt-robotassistenter som rör sig säkert i verkliga sjukhusmiljöer.
Citering: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Nyckelord: sjukhusrobotar, autonom navigering, patientövervakning, LiDAR-kartläggning, ruttplanering